







 本文提供了一个ROS项目,用于通过修改launch文件中GPS RTK的ROS话题名称来实现坐标轨迹的可视化。用户需要将'/mti0/sensor/fix_navsat'替换为自己的GPS/RTK话题,然后执行catkin_make即可运行。项目代码可在提供的百度网盘链接中获取,提取码为1111。
本文提供了一个ROS项目,用于通过修改launch文件中GPS RTK的ROS话题名称来实现坐标轨迹的可视化。用户需要将'/mti0/sensor/fix_navsat'替换为自己的GPS/RTK话题,然后执行catkin_make即可运行。项目代码可在提供的百度网盘链接中获取,提取码为1111。
完整项目代码放在文章最后的链接里面
launch文件中的rtk or gps 的ros话题名称需要修改成你ros话题名称;
<remap from="/mti0/sensor/fix_navsat" to="/your/gps/rtk/topic" />
其他的就没有了,直接catkin_make 就可以运行了
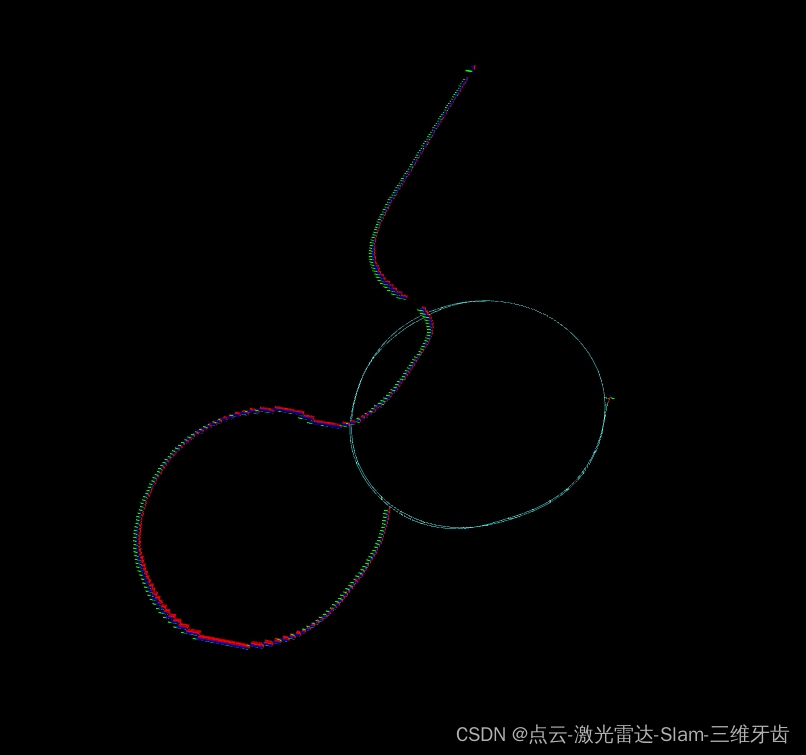
将GPS轨迹,计算出每个gps坐标相对与第一个坐标的距离(m为单位),比较相邻两点的经纬度变化,得到了位移的方向,然后得到轨迹
launch文件中的rtk or gps 的ros话题名称需要修改成你ros话题名称;
<remap from="/mti0/sensor/fix_navsat" to="/your/gps/rtk/topic" />
其他的就没有了,直接catkin_make 就可以运行了
launch文件中的rtk or gps 的ros话题名称需要修改成你ros话题名称;
其他的就没有了,直接catkin_make 就可以运行了
代码

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1177
1177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











