






实践内容:
1、运用urdf建模实现案例中的机器人。
2、根据以上掌握的方法,再快速创建一个机器人模型。
成果图:
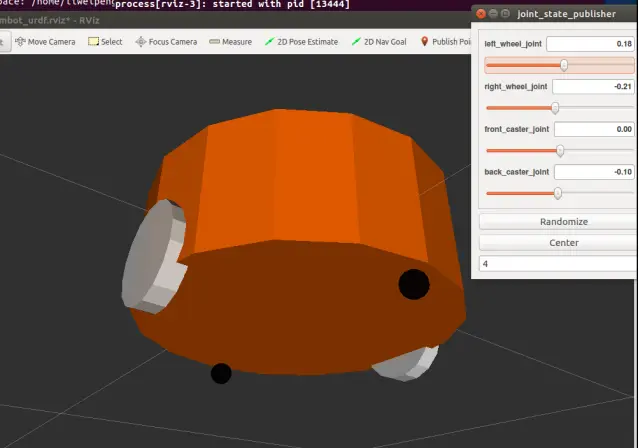
成果图
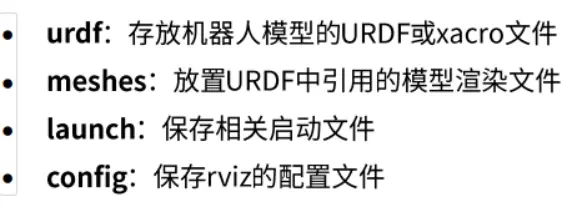
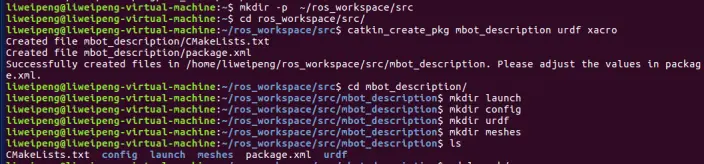
创建需要用到的功能包以及各种文件夹:
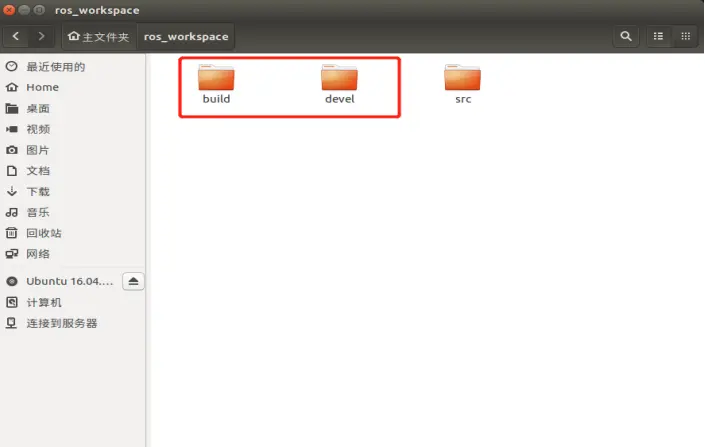
Build跟devel两个文件夹在catkin_make之后会自动生成:
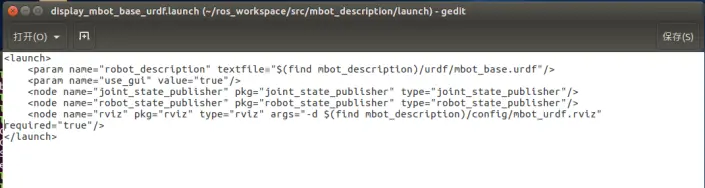
编写launch文件:
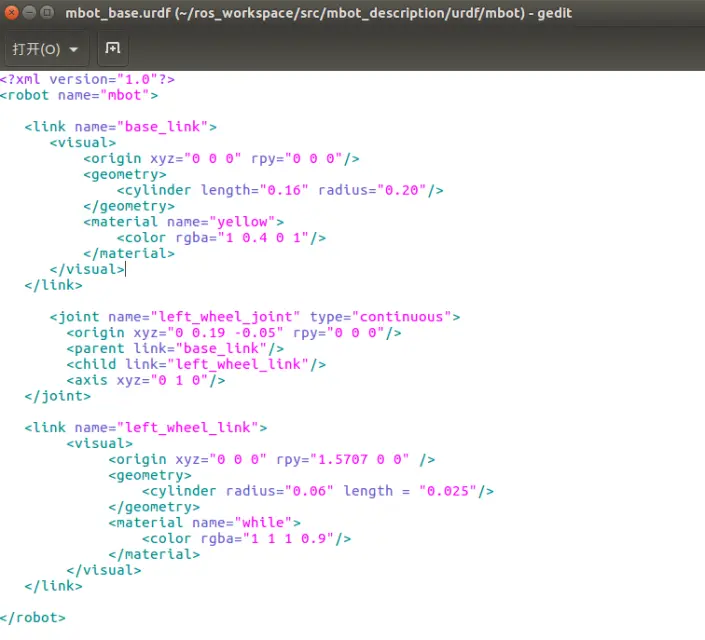
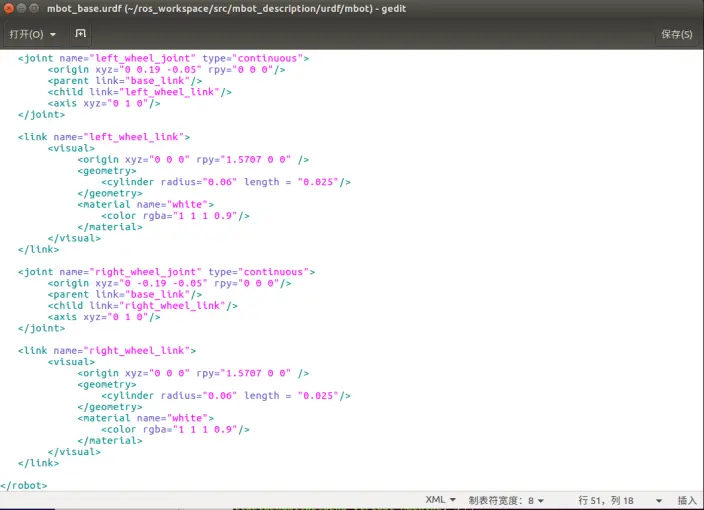
添加左轮:
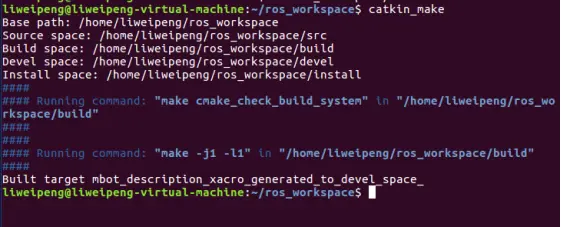
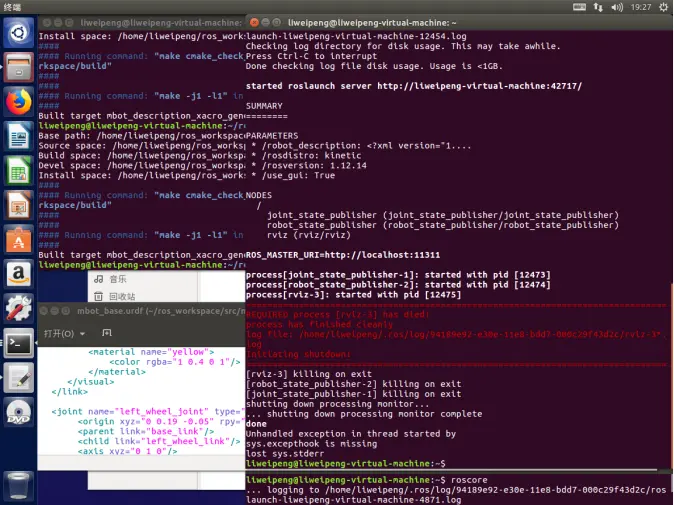
编译:
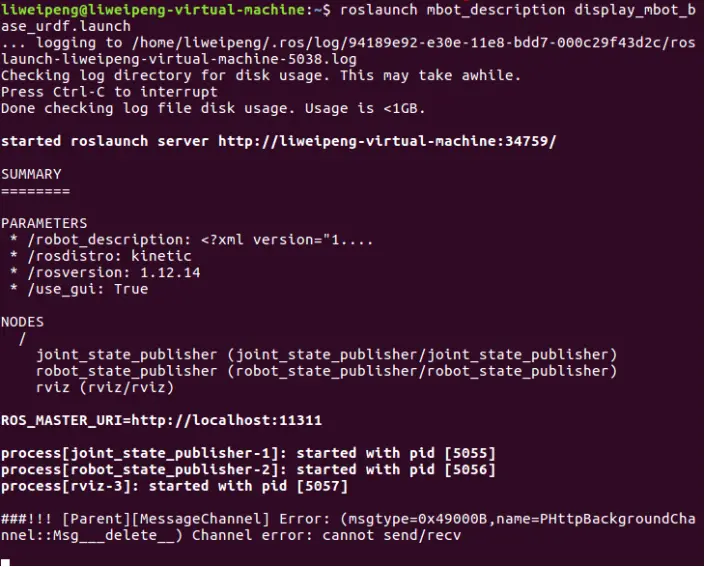
启动:
roslaunch mbot_description display_mbot_base_urdf.launch
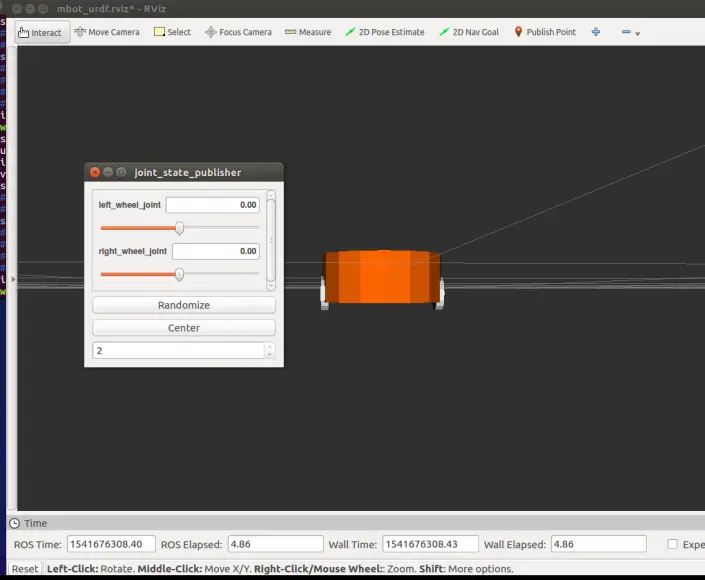
效果:
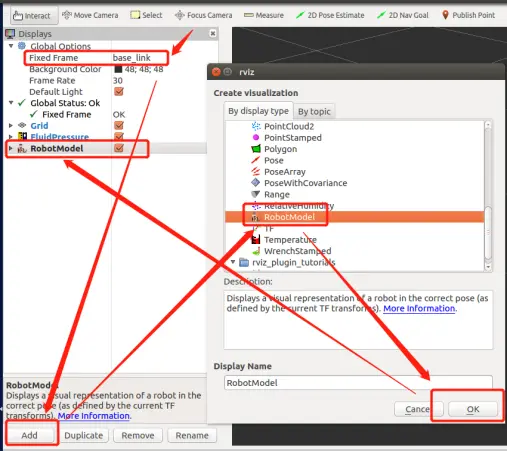
(当然打开之后需要进行下面一番骚操作先——设置好RobotModel)
拖动滑动条控制轮子转动:

添加右轮:
编译,启动,
效果如下:
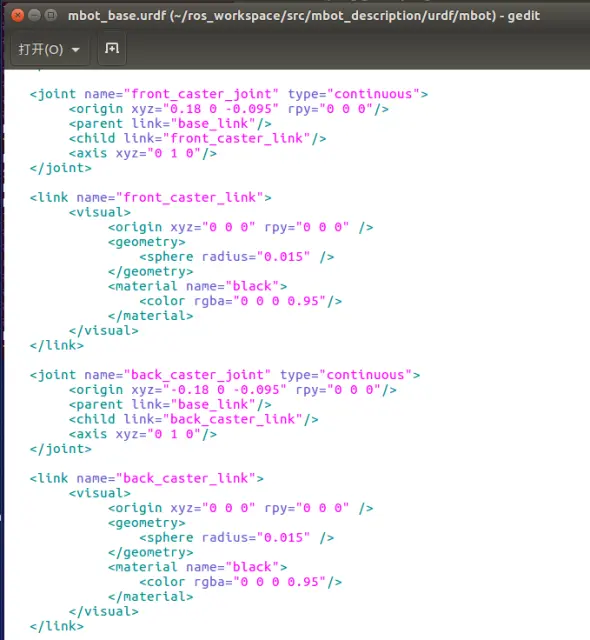
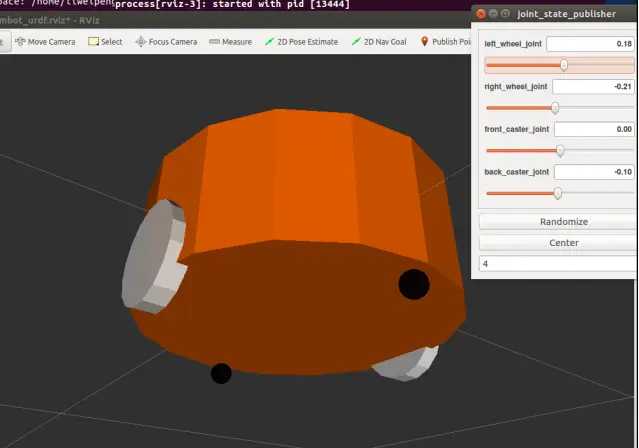
使用球体创建前后支撑轮:
编译,启动,效果如下:
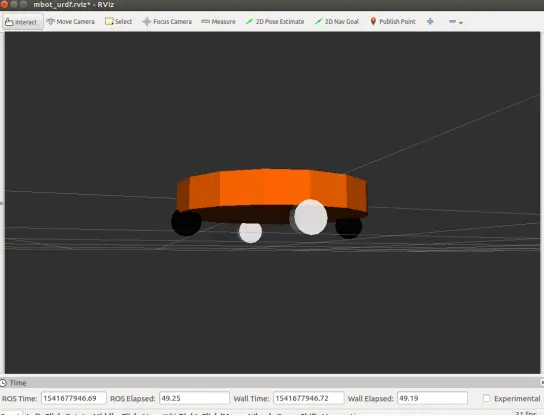
创建一个自己的机器人模型:
代码:
<?xml version="1.0"?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.06" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.03" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.03" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.045" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<sphere radius="0.03" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.045" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<sphere radius="0.03" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
</robot>
效果:
















 7169
7169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











