







准备工作:安装有相关环境的电脑一台,组装好的无人驾驶小车一台,烧录好系统的SD卡一张,与烧录SD卡配置一致的路由器一台。
注:以下内容都以主机名为duckiebot1的小车为例说明。
目录
1、第一次启动小车
SD卡插入主控板卡槽,单按一下电池按钮,系统启动,正常现象为:
1)车灯点亮,显示蓝色
2)驱动板上第一、四个micro口附近指示灯点亮
3)主控板上micro口附近指示灯点亮
4)风扇转动
5)等待一段时间后无线网卡亮蓝灯并闪烁
6)车灯熄灭再次亮起,颜色转变为白色
7)车灯再次闪烁后,LED屏亮起,同时顶部按钮点亮,单次按下顶部按钮,LED屏循环显示主板基本信息和tof传感器数据。
确保电脑与小车在同一局域网内,在windows系统终端输入ping duckiebot1.local
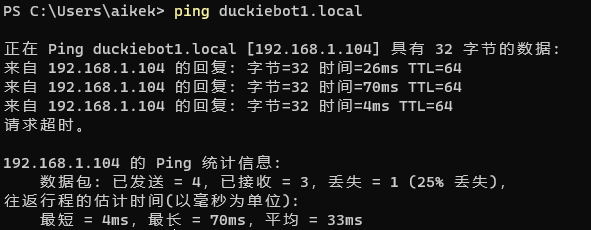
可以看到duckiebot1对应IP为192.168.1.104,则说明电脑与小车网络连接成功。
在虚拟中输入小车在线查询指令:
$ dts fleet discover

可以看到在线小车列表,即可进行下一步配置。
2、初始化设置
电脑连接到路由器上,小车启动后会自动连接路由器。打开浏览器,访问地址:http://duckiebot1或者http://duckiebot1.local
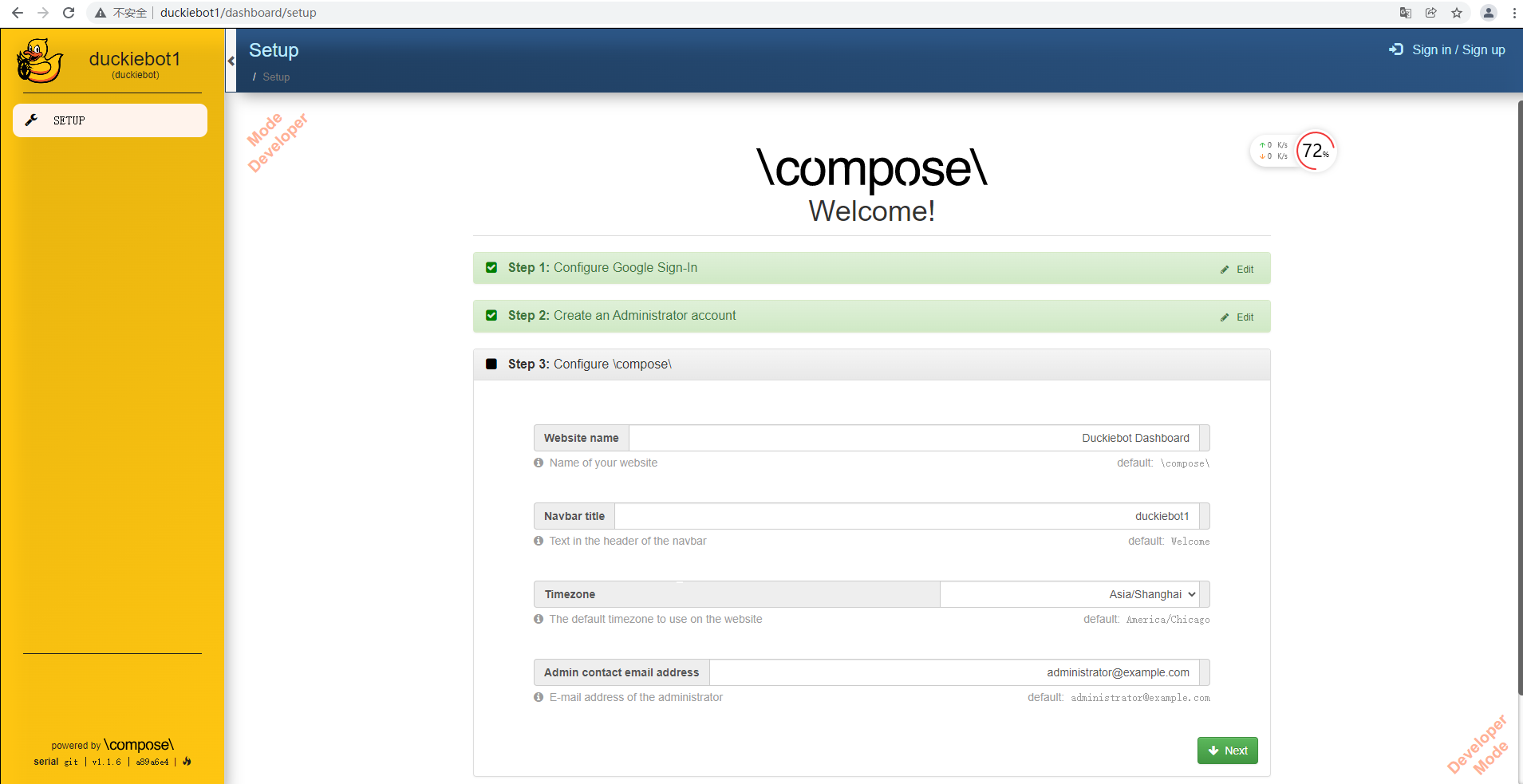
TImezone选择Asia/Shanghai,其他默认,点Next:
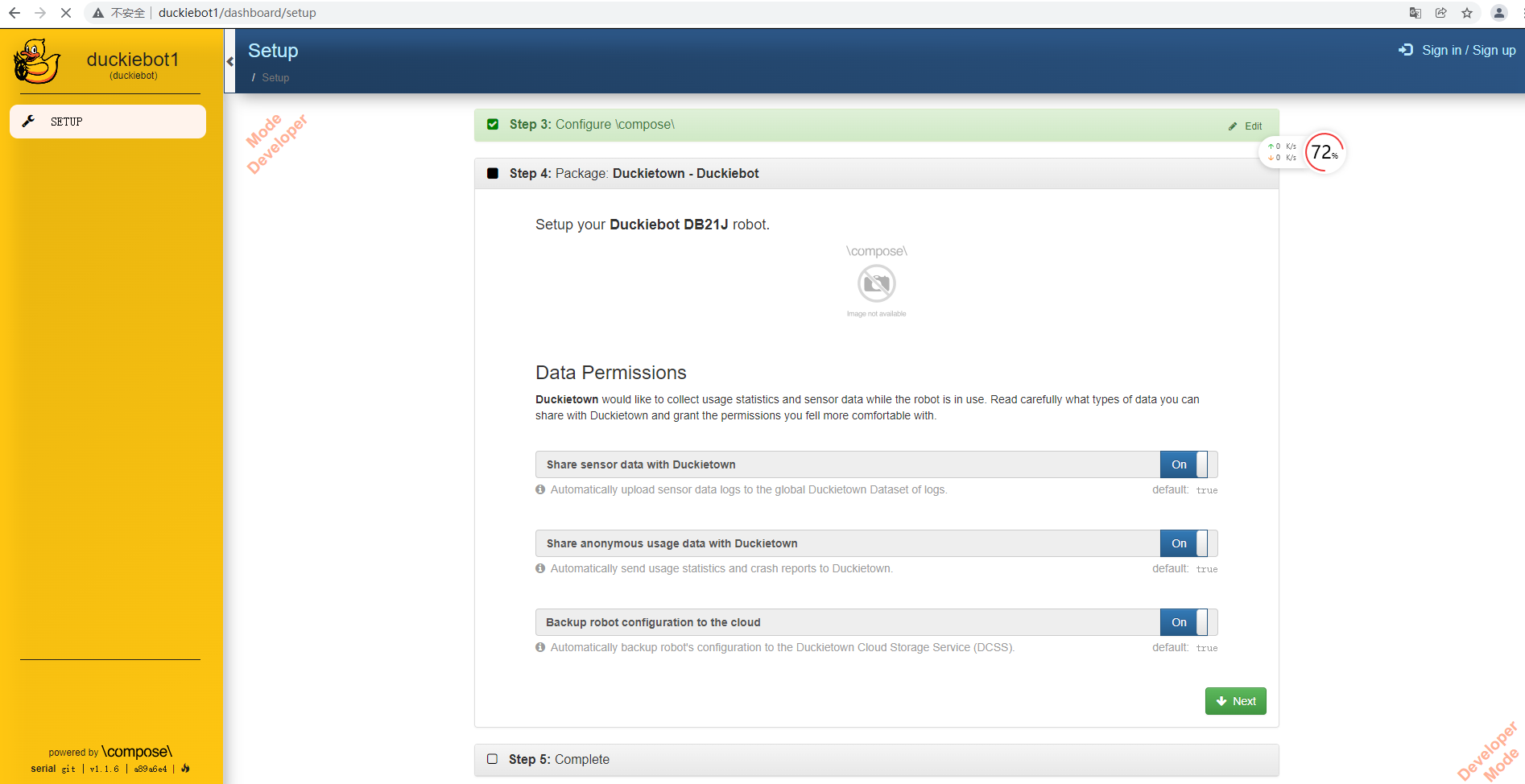
全部默认,点Next:
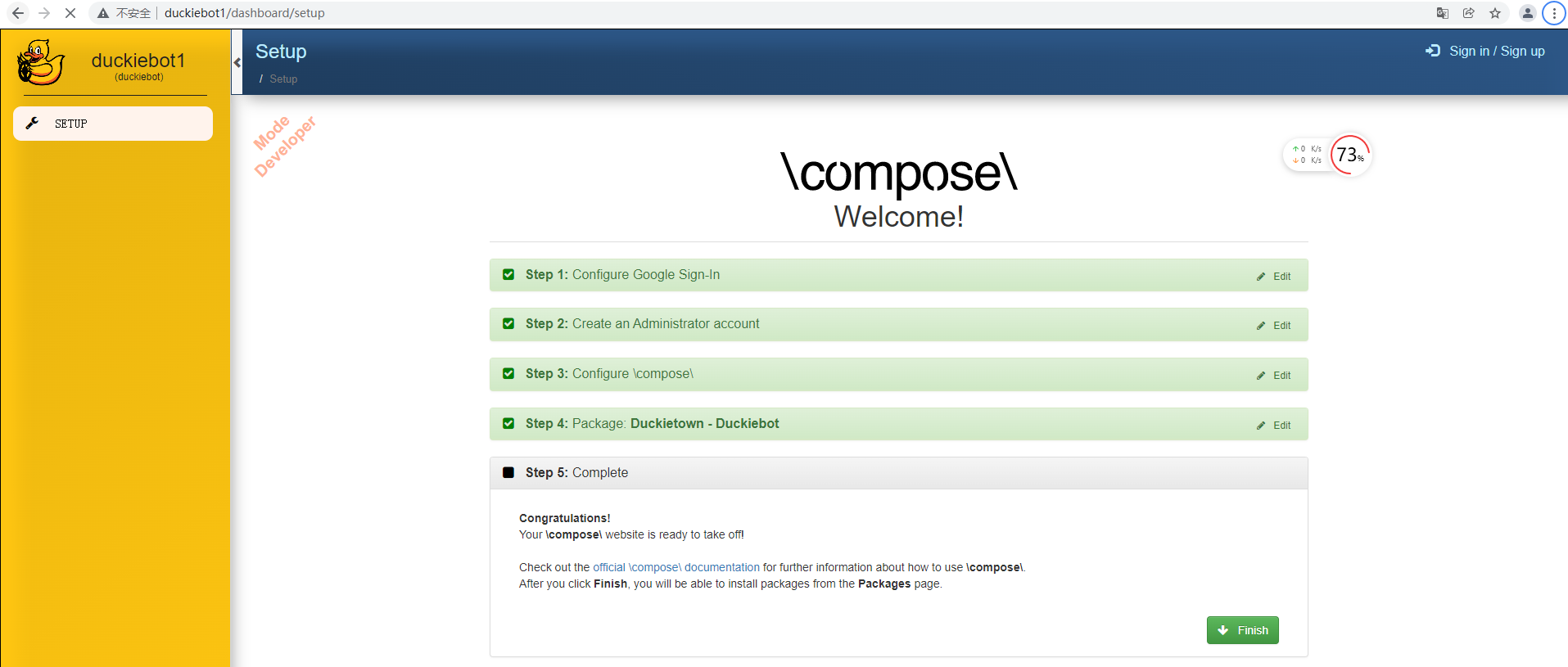
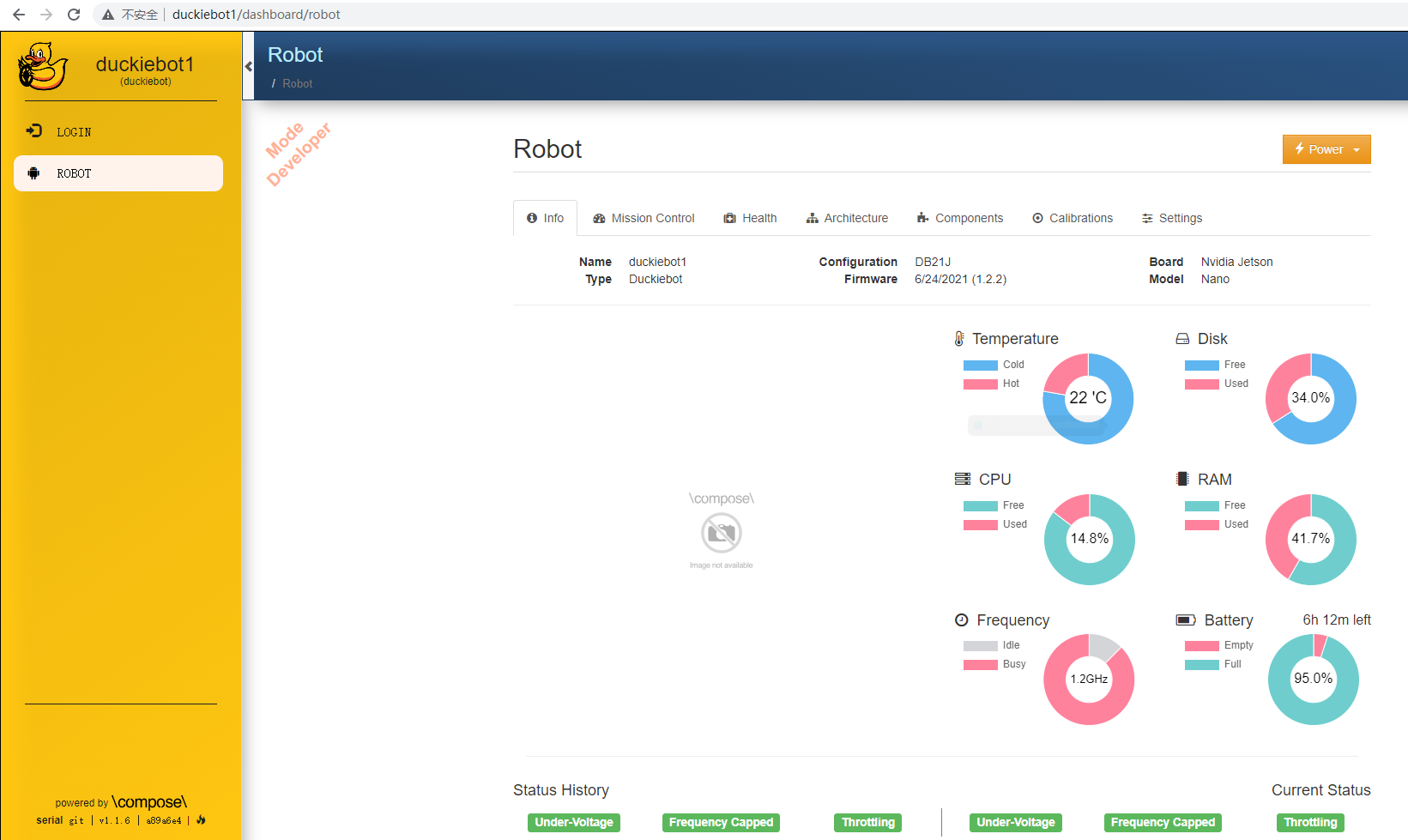
点finish完成设置,进入小车状态查看页面:
点左上角的LOGIN,登录软件:
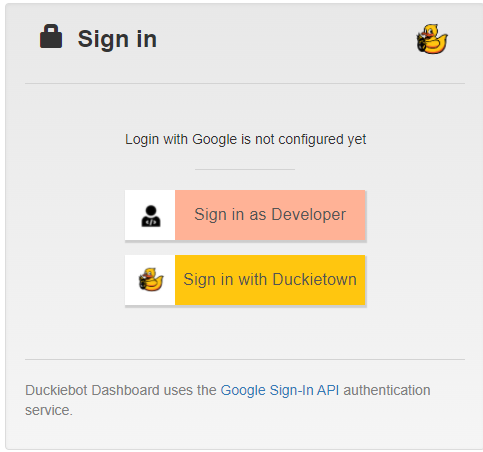
选择 Sign in as Developer,

输入token:dt1-3nT8KSoxVh4MdKBWdBDdexqAPFFC5NX8YDcM5VgNMqDa5sr-43dzqWFnWd8KBa1yev1g3UKnzVxZkkTbfgkb4xRu1FHbvrYx1NU8TdwoenF36xqzWD
并确认,可以看到以下目录:

常用目录为以下3个:
FILE MANAGER:文件管理器,可以查看部分配置文件
PORTAINER:镜像管理系统,可以查看并控制系统docker实例
ROBOT:小车状态页面
设置部分主要用一下ROBOT界面:

在这里的Info页可以看到小车主控板系统运行参数,包括温度、磁盘空间、CPU使用率、内存使用率、主频使用率以及电池电量;
在Mission Control页面可以看到电机状态以及摄像头画面:
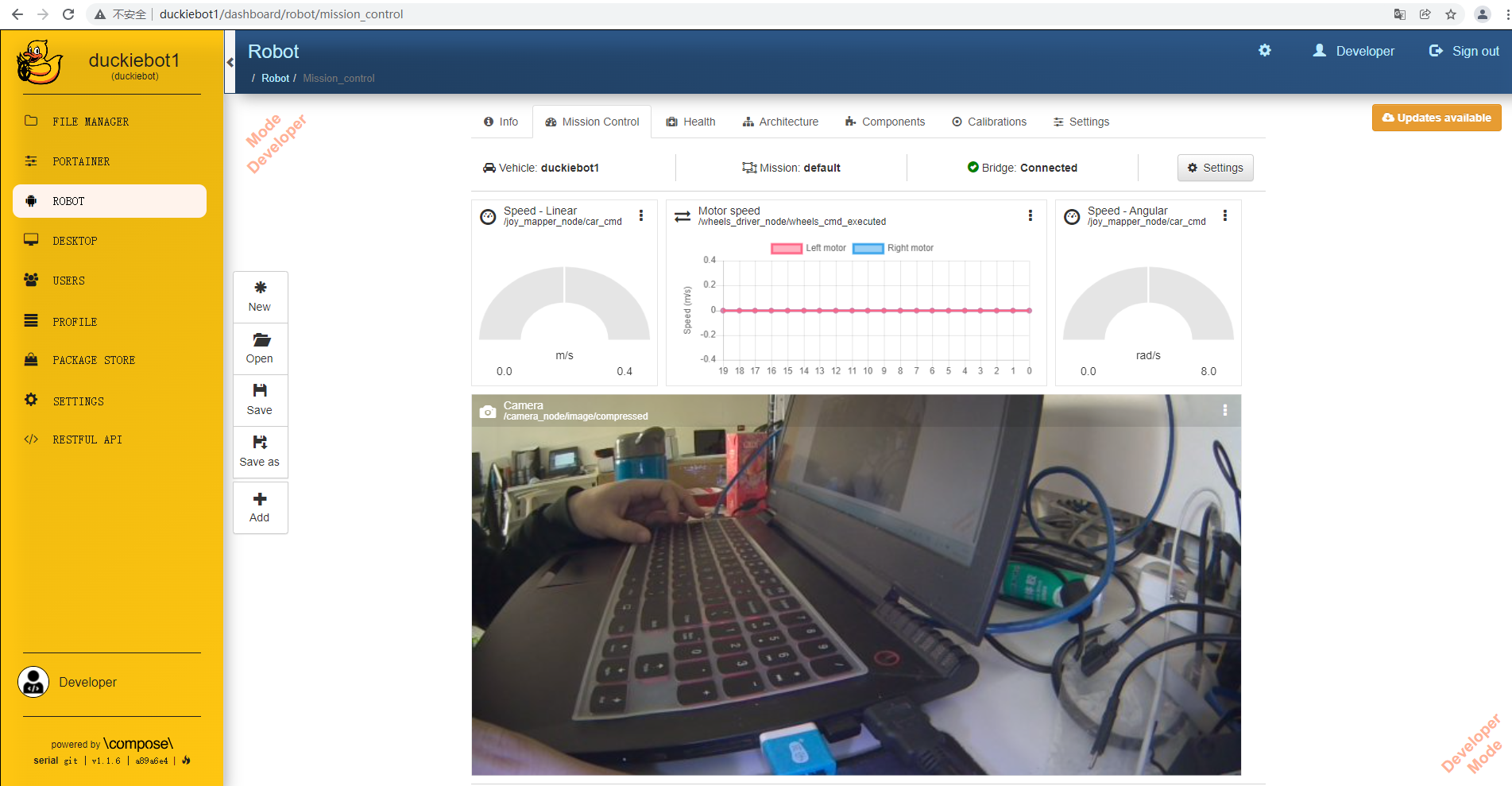
注:如果摄像头图像是花色雪花状,请移除摄像头的镜头盖
通过旋转摄像头镜头,调节焦距,直到图像比较清晰为止。
3、远程登陆
打开windows电脑终端,输入命令:
$ ssh duckie@duckiebot1
duckie:默认用户名
duckiebot1:烧录SD卡时设置的主机名(--hostname)
登录密码:quackquack


查看启动的docker实例
$ docker ps -a

4、更新电池固件
更新电池驱动,需要在安装有Duckietown Shell的linux系统下进行,登录虚拟机,输入电池信息查询命令:
$ dts duckiebot battery check_firmware duckiebot1
INFO:dts:Fetching data from robot 'duckiebot1'...
boot:
date: 09/30/21
pcb_version: '16'
version: '1'
serial_number: 29EDA9EF
version: 2.0.2
显示固件版本为2.0.2则不需要更新,如果不是2.0.2,需要更新电池固件
$ dts duckiebot battery upgrade duckiebot1
等待下载镜像文件,并启动更新程序,当提示双击电池按键进入boot模式时,快速连续按两次电池按钮,则可更新电池固件。
5、更新驱动板固件
通过SSH远程登陆duckiebot1
更新软件包
$ sudo apt-get update
安装需要的软件
$ sudo apt-get install bison autoconf flex gcc-avr binutils-avr gdb-avr avr-libc avrdude build-essential -y
下载固件安装包并配置、编译、安装
$ git clone https://github.com/duckietown/fw-device-hut.git
$ cd fw-device-hut
$ sudo cp _avrdudeconfig_jetson_nano/avrdude.conf /etc/avrdude.conf
$ make fuses
sudo avrdude -p attiny861 -c linuxgpio -P -q -U lfuse:w:0xe2:m -U hfuse:w:0xdf:m -U efuse:w:0xff:m
avrdude: AVR device initialized and ready to accept instructions
......
avrdude: verifying ...
avrdude: 1 bytes of efuse verified
avrdude: safemode: Fuses OK (E:FF, H:DF, L:E2)
avrdude done. Thank you.
$ make
-------- begin --------
avr-gcc (GCC) 5.4.0
Copyright (C) 2015 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
......
avrdude: verifying ...
avrdude: 2832 bytes of flash verified
avrdude: safemode: Fuses OK (E:FF, H:DF, L:E2)
avrdude done. Thank you.
删除安装包并重启
$ cd .. && rm -rf fw-device-hut
$ sudo reboot
















 1620
1620











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











