







关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接: Car-like robot运动参数校准(包含原文PDF百度云下载链接)


在《常见移动机器人运动学模型》一文中总结了目前常见的移动机器人运动学模型,前文《常见移动机器人轮直径校准》介绍了car-like robot的轮直径校准方法,但是在《差速驱动机器人轮间距校准》并没介绍car-like robot的轮间距校准,这里埋个伏笔,后文给出答案。
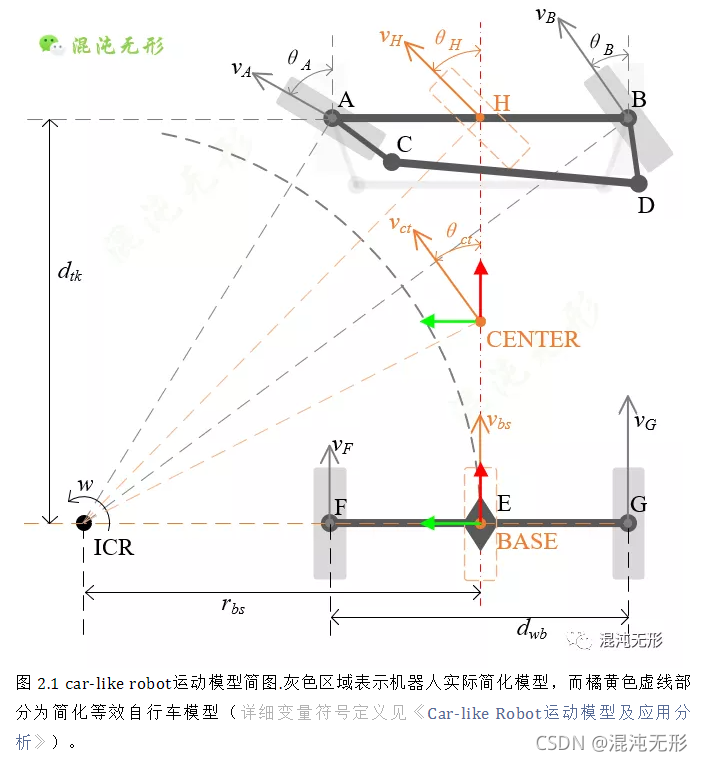
除了上述提到的轮直径校准之外,car-like robot的其他几个运动参数还需要校准,这里以图 2.1中对应的car-like robot的运动学模型为例(完整的运动学模型分析见《Car-like Robot运动模型及应用分析》):
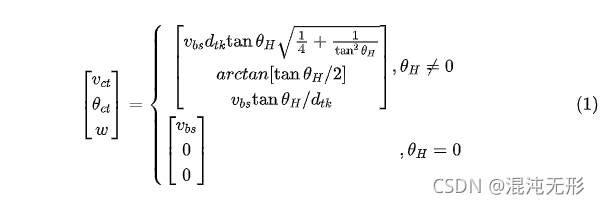
从公式(1)可以看出,有两个参数会被使用,前轮虚拟转向角θH和轴间距dtk(即AB和FG之间的距离),而后轮中心速度vbs已经通过轮直径校准实验进行了校准。
这里需要进一步分析:要校准前轮虚拟转向角θH,就需要校准前轮转向零位及转向角分辨率;而要校准轴间距,则需要先校准轮间距;要进行上述校准的前提是已经完成了轮直径校准(具体原由在后文中分析阐述)。
如果前轮转向角及轴间距等参数测量不准确,在使用运动学方程转换计算时,将会引起较大误差,且运动越远,误差会累计放大,所以上述参数是非常有必要校准的!
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:Car-like robot运动参数校准(包含原文PDF百度云下载链接)
CSDN下载链接:如果喜欢的话,可以关注同名微信公众号“混沌无形”,阅读更多有趣好文!



















 1653
1653

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











