










在上一篇博客中(浅谈三维形状上下文特征3DSC理论及应用),我们已经介绍了3DSC的设计原理以及实现细节,以及该特征在一定程度上受限于法线估计的缺陷。事实上,在文献[1]中,作者在提出3DSC的同时,也给出了对应的解决方案,以缓解3DSC的内在缺陷,即调和形状上下文特征Harmonic shape contexts(HSC)。今天我们将具体学习一下HSC的原理以及实现。
一. 简介
针对HSC一个最简单和直接的解释,即对3DSC信息实现频域变换。由于点云数据存在对法线估计的误差,导致有一些点的局部球形空间定位会产生异常。这样给3DSC特征提取带来了不稳定的因素。根据点云特性可知,除非处于边界区域,否则点云的法线分布应保持连续,或法线的变换是平滑的。那么,针对非边界区域,3DSC对应的直方图数据变化也应该是平滑的。如果在非边界区域产生了一个显著的扰动或数据异常,那么可以假设该区域的法线估计出现了问题。因此,一个直观的解决方案就是使用一个频域分析来降低随机扰动带来的统计信息异常。基于该思想,HSC被提出。
基于3DSC建立的直方图,HSC将其作为采样样本,针对球体shell(不知道准确翻译,结合上下文,感觉就是针对一个bin的球体胞腔空间),计算一个球面调和变换。HSC描述子可以被认为是调和变换的振幅,对方位角具有旋转不变性,因此可移除方位角相关的自由度。下面,我们就来展开介绍一下HSC算子提取的具体步骤。
二. HSC算子提取
任何方程都能够表示为一组球面调和基函数的和(这个类似于傅里叶变换在三维的推广,即任何函数都能不表示为一组三角函数的组合)。求和计算被视为一个调和变换f,在数学上表示为:
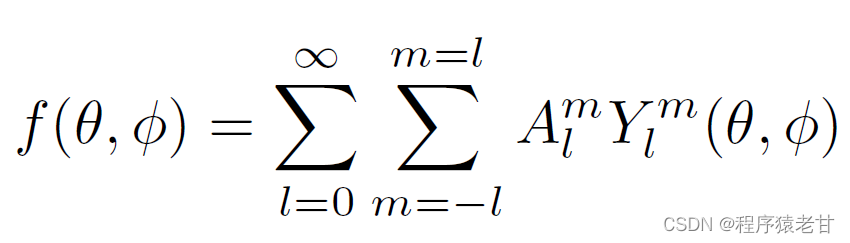
Y_l^m为之前提到的基函数。该变换的一个重要特性是将按照方位角的旋转变换转换为一个在频域的相位变换。谐波系数||A_l^m||是不受方向角变换的影响的。基于对调和变换f的定义,结合3DSC的bin数据,给出一个针对shell的函数fi,定义如下:

在频域中,j所代表的方向角变换被视为无关信号影响的位移。如文献[2]提到的,这里设定一个带宽b,并且只储存调和表示中的b个低频部分,加入到HSC,由下面计算得到:
![]()
对于任何实函数, ||A_l^m||=||A_l^-m||,当m小于0时,丢弃系数||A_l^m||。这样获得的HSC维度为Kb(b+1)/2。注意,方位角与位差的划分不影响HSC的维度(我理解是K与b已经是频域的信息了,和空间数据的划分自然没有关系了)。HSC与旋转不变描述子SH[2]相关。不同的是,SH是用来描述全局形状特征的。相比之下,HSC保留了单独的频域成分的振幅,因此对于特征描述更加详细。
图1给出了一个示意图,以可视化HSC的旋转不变特性。其中,右子图粉色区域代表一个由半径定义的shell区域,当我们计算这个区域的频域数据时,选择不同的法线,会得到不同的SC表达,就像左子图的红色信号一样,数据的分布会发生偏移。但是,从频域的角度看,这种在时域的偏移不会影响频域内的数据表示。两个看似不同的时域信号,在经过傅里叶变换后,得到完全相同的频域表达。因此,在频域建立的HSC具有旋转不变性。
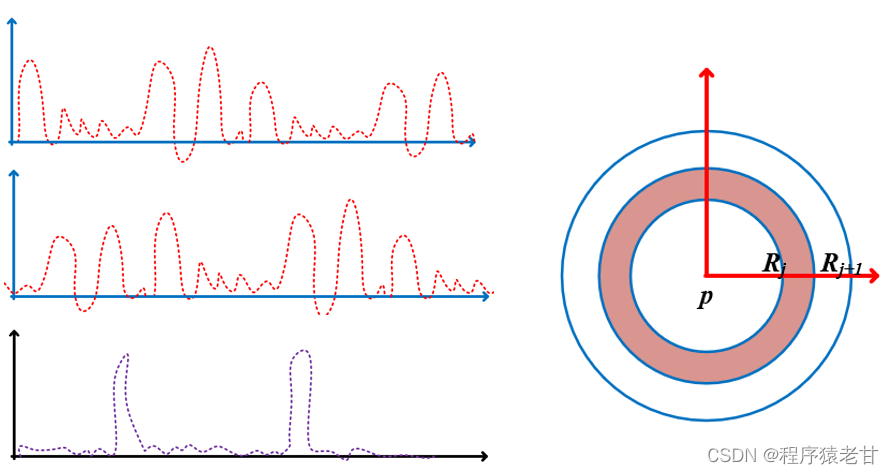
图1. HSC频域特征的二维示意图。
通过将空间点分布的数据,转换为频域的信号表示,HSC在一定程度上解决了3DSC的随机扰动问题。在频域上的特征表示,对于旋转拥有更好的鲁棒性,更多的体现每个shell数据分布变换的快慢,而非数据分布本身。因此,通过调和变换获得的,基于频域信号表示的HSC,在一定程度上解决了3DSC旋转敏感的问题。
总结
HSC用于解决3DSC受法线估计影响,对旋转敏感的问题。通过将相位角对应的信息变化,映射到对应的频域中,得到频域中的相位信息,进而获得对旋转鲁棒的特征表示。不过我觉得HSC对于旋转敏感的解决方案,有些差强人意。频域变换实际上已经造成了信息的损失,更何况还要在频域做裁剪。目前我没有找到HSC的实现代码,针对HSC的资料确实很少。这从侧面说明了HSC在实践中并没有为3DSC带来本质的改善。不过,HSC提供的思路是值得借鉴的,在频域中尝试解决旋转问题,还是有一些可做的点。
Reference
[1] A. Frome, et al. Recognizing objects in range data using regional point descriptors [C]. ECCV, 2004: 224-237.
[2] K. M, et al. Rotation invariant spherical harmonic representation of 3d shape descriptors. ACM SIGGRAPH symposium on Geometry processing, 2003:156-164.


















 290
290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











