







Teleoperation System
远程操作系统
We introduce ALOHA: A Low-cost Open-source Hardware System for Bimanual Teleoperation. With a $20k budget, it is capable of teleoperating precise tasks such as threading a zip tie, dynamic tasks such as juggling a ping pong ball, and contact-rich tasks such as assembling the chain in the NIST board #2.
我们介绍了ALOHA:一种用于双手远程操作的低成本开源硬件系统。凭借2万美元的预算,它能够远程操作精确的任务,如穿拉链,动态任务,如玩乒乓球,以及丰富的接触任务,如在NIST板2中组装链条。
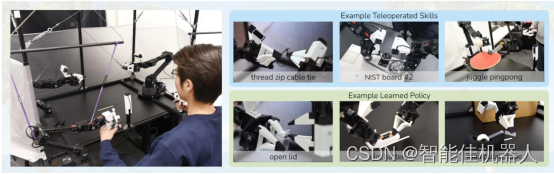
Fig. 1: ALOHA : A Low-cost pen-source Hardware System for Bimanual Teleoperation. The whole system costs $20k with of-the-shelfrobots and 3D printed components Lef: The user teleoperates by backdriving the leader robots. with the follower rohots mirrorine the motionRight: ALOHA is capable of precise. contact-rich, and dynamic tasks. We show examples
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1852
1852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









