




 这篇内容详细阐述了控制系统的设计与分析,包括典型输入信号、动态性能指标如一阶和二阶系统的输出响应。特别是二阶系统的单位阶跃响应,探讨了不同阻尼比ζ对系统性能的影响,指出ζ通常在0.4~0.8之间以兼顾快速性和稳定性。此外,还介绍了劳斯判据用于判断系统稳定性,并讨论了系统类型与稳态误差的关系,强调通过增加开环增益或系统类型可减少稳态误差。
这篇内容详细阐述了控制系统的设计与分析,包括典型输入信号、动态性能指标如一阶和二阶系统的输出响应。特别是二阶系统的单位阶跃响应,探讨了不同阻尼比ζ对系统性能的影响,指出ζ通常在0.4~0.8之间以兼顾快速性和稳定性。此外,还介绍了劳斯判据用于判断系统稳定性,并讨论了系统类型与稳态误差的关系,强调通过增加开环增益或系统类型可减少稳态误差。
目录
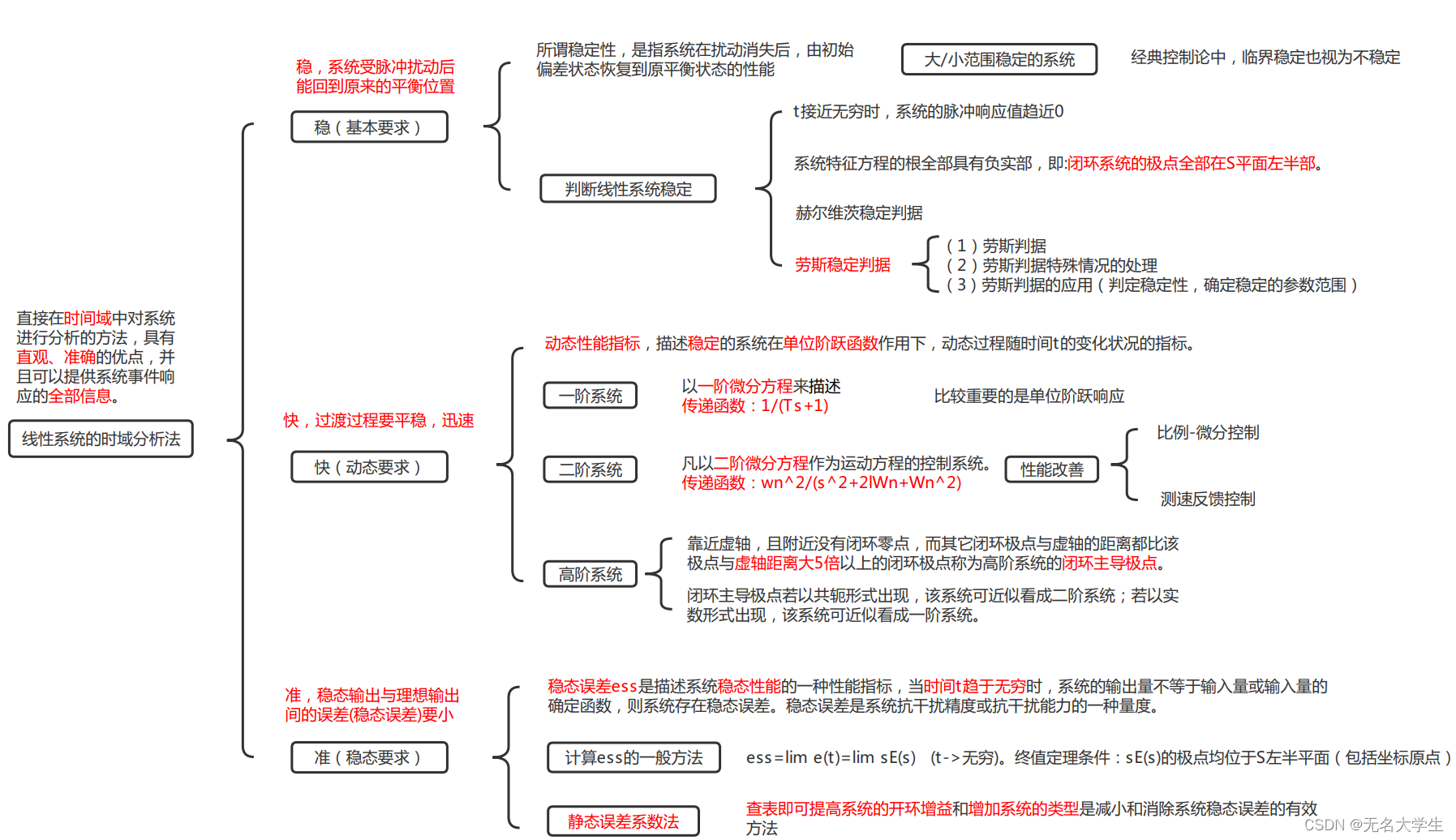
1.知识梳理&逻辑图
书上顺序:
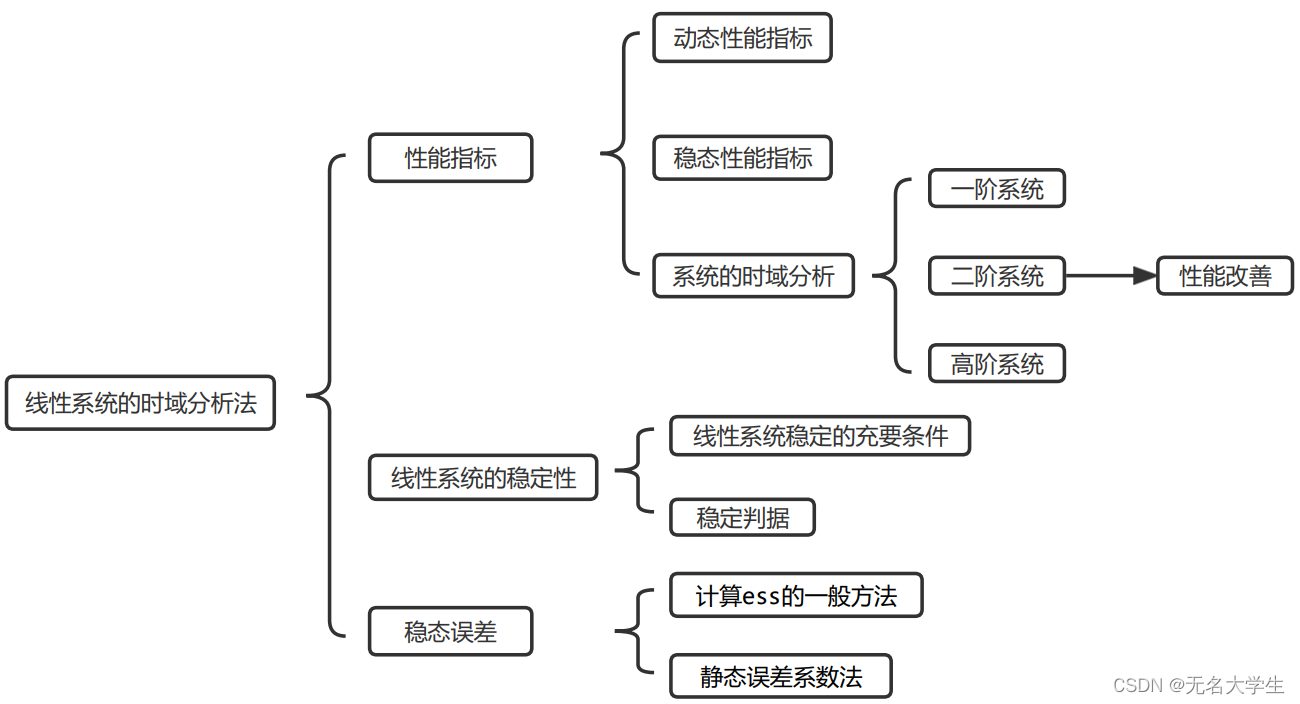
知识点梳理:
2.补充内容
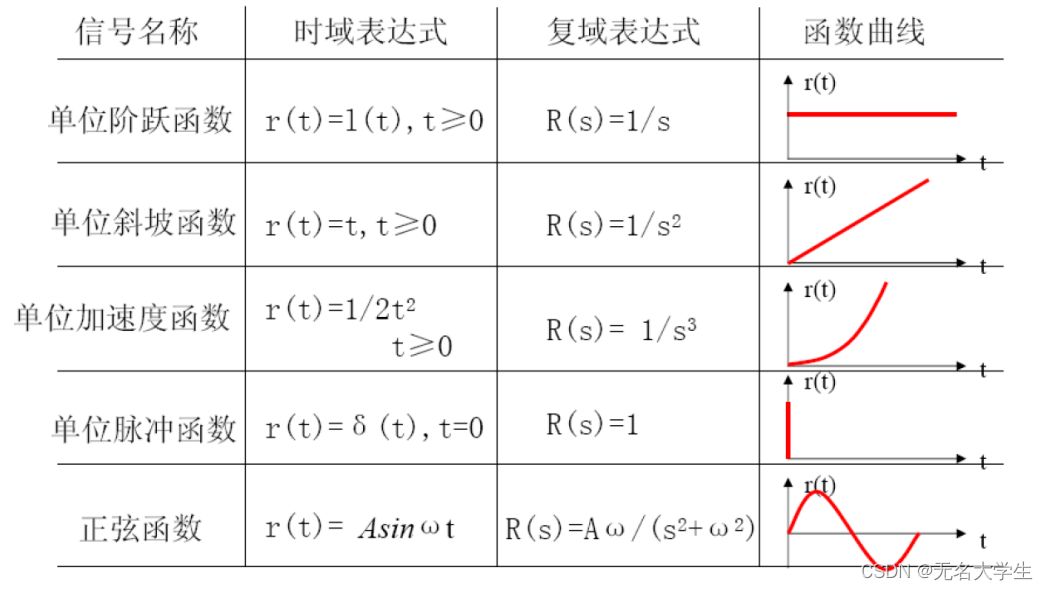
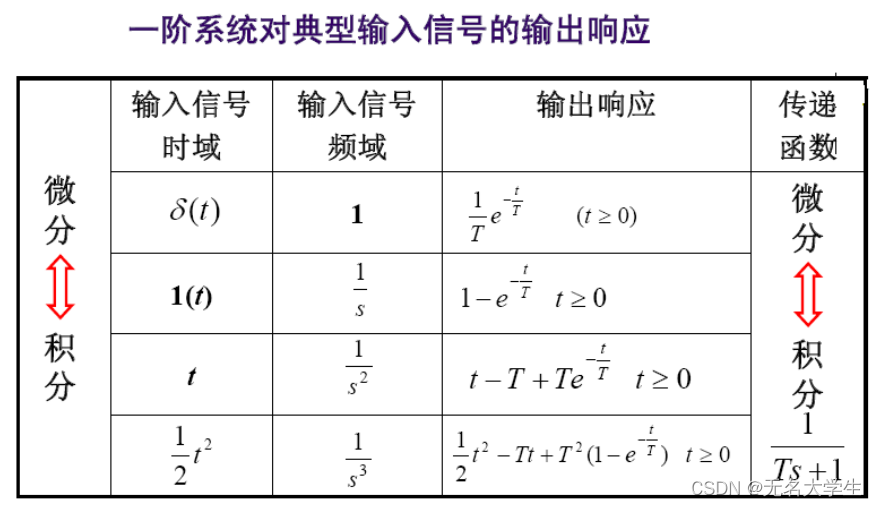
2.1典型输入信号
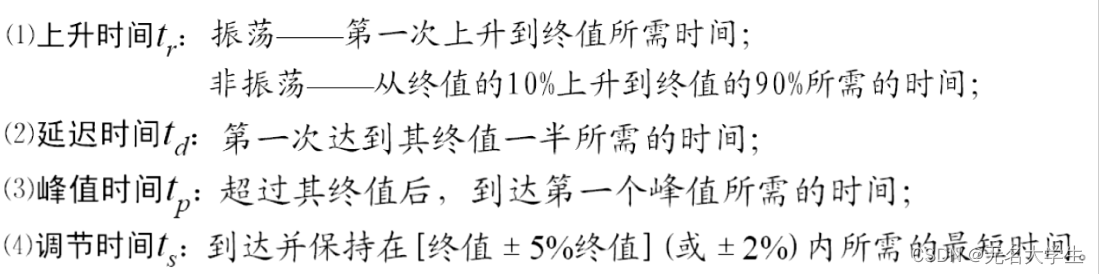
2.2动态性能指标:
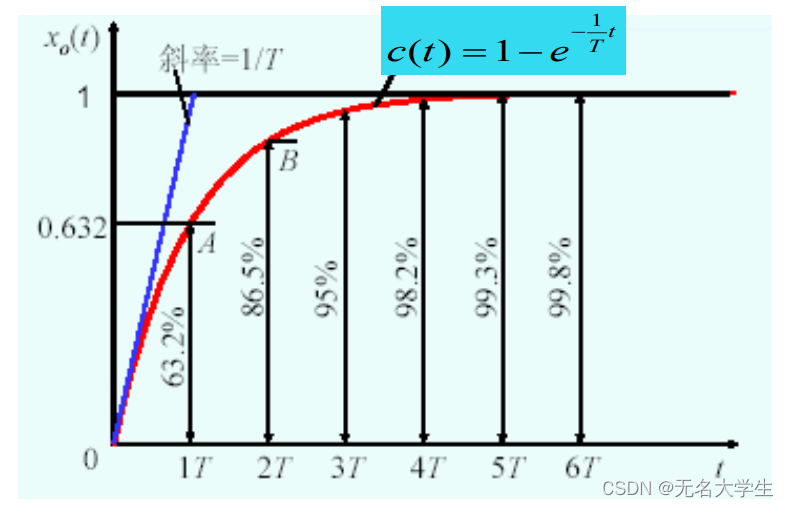
2.3一阶系统的输出响应
一阶系统的单位阶跃响应:
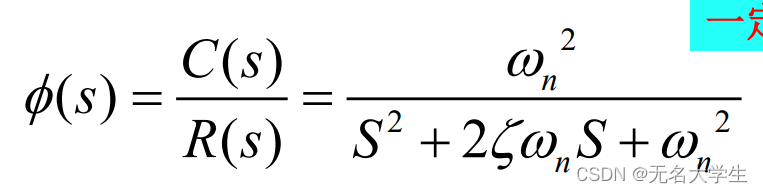
2.4二阶系统的单位阶跃响应
二阶系统闭环传递函数表示为如下标准形式:

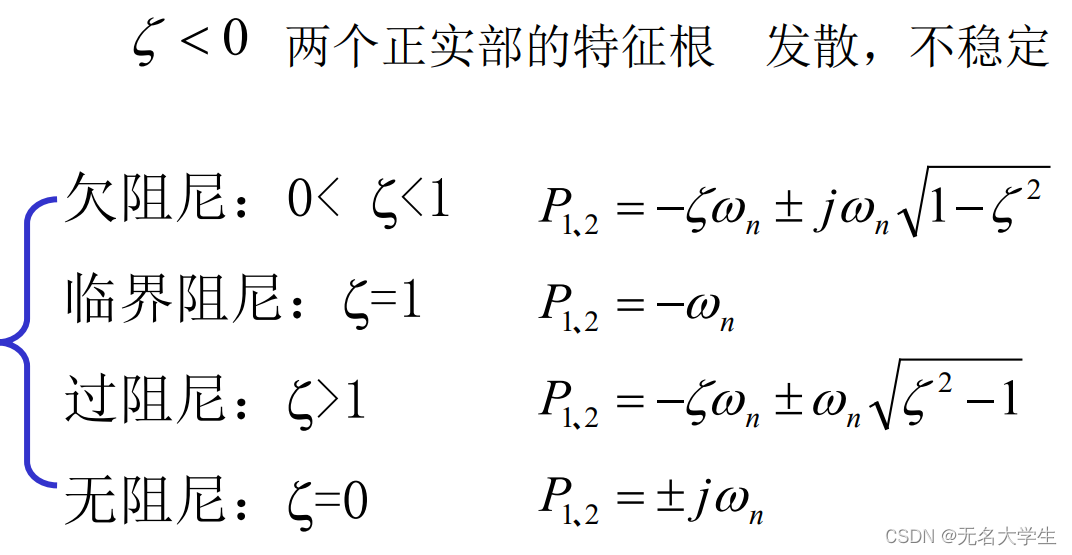
二阶系统在不同ζ 值单位阶跃响应曲线:
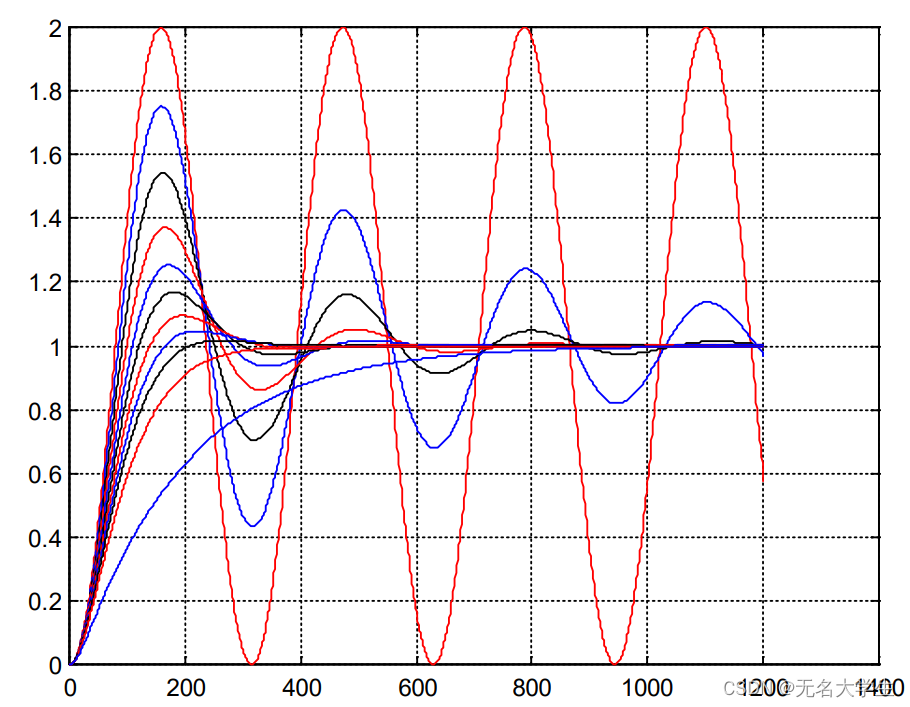
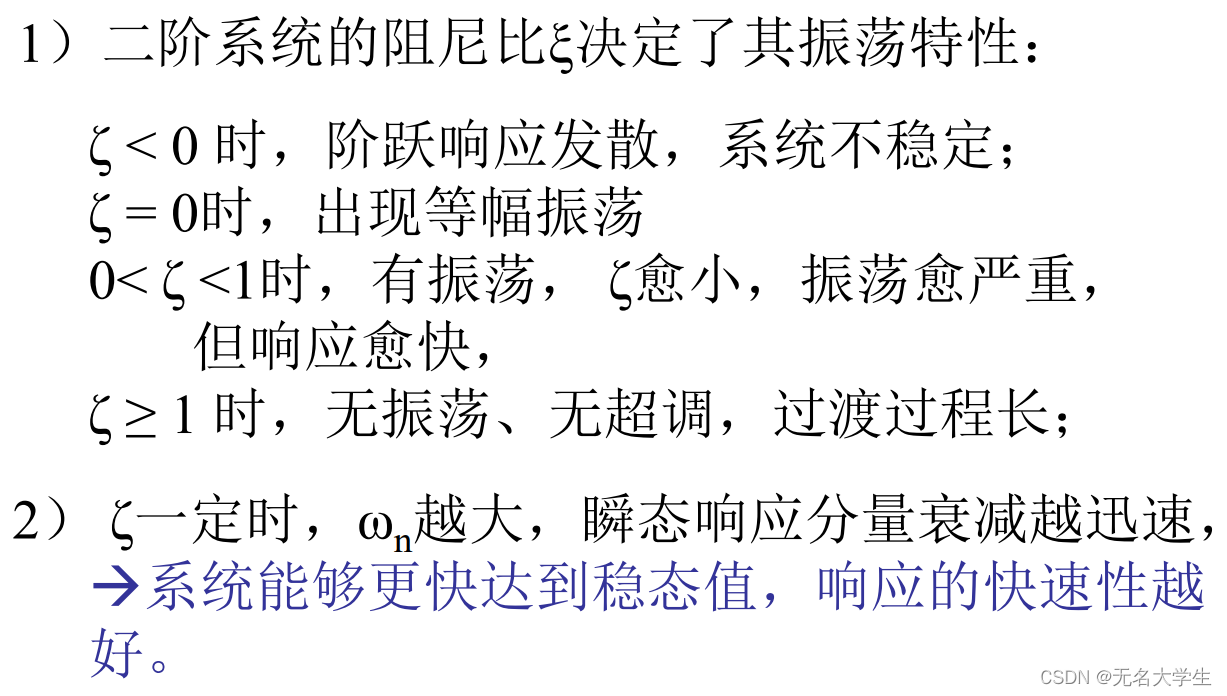
通常采用欠阻尼系统,且阻尼比ζ通常选择在0.4~0.8之间,以保证系统的快速性同时又不至于产生过大的振荡。
欠阻尼系统: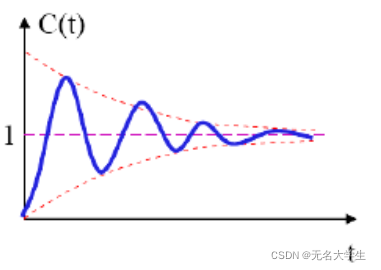
欠阻尼系统的动态指标计算也比较重要,见书本P84-86

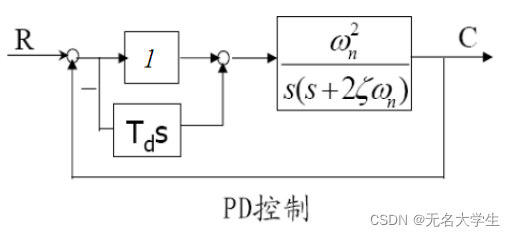
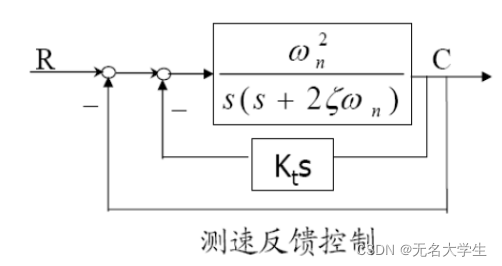
2.5二阶系统性能的改善
两种方法:
2.6劳斯判据
劳斯阵列:
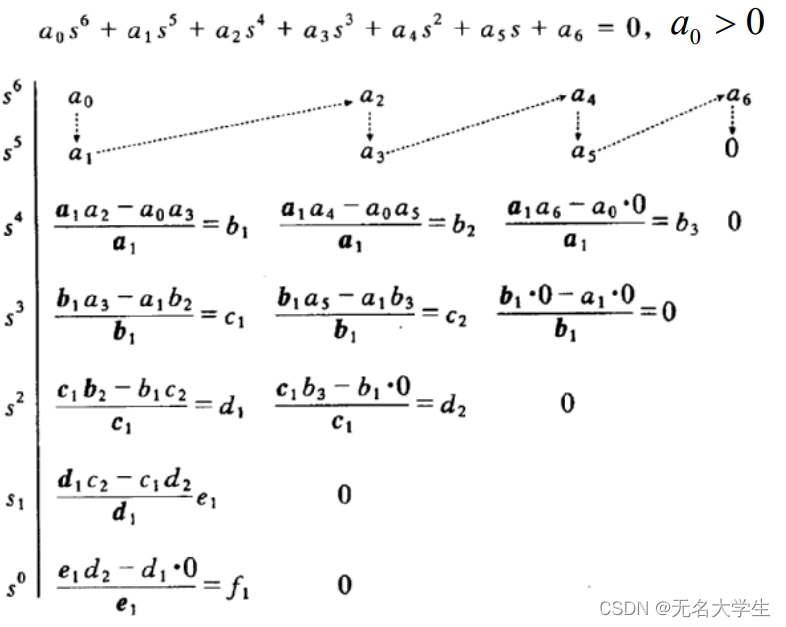
劳斯稳定判据可以简述为劳斯阵列表中第一列的各数均大于零。
劳斯判据两个特殊情况:1.第一列出现0。2.某一行元素均为0。
2.7系统类型和稳态误差

系统在控制信号作用下稳态误差系数和稳态误差
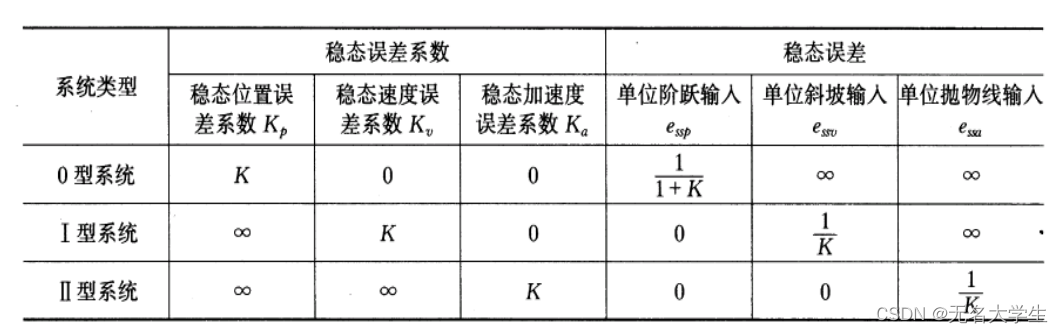
所以增加系统开环增益或增加系统类型,可减小稳态误差。


















 5296
5296

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











