






在多刚体系统动力学分析中,若需要是机构具有确定的运动条件,需要满足一定的自由度问题,今天给大家介绍一下ABAQUS中多刚体系统自由度的计算问题。
下面我们先来回顾一下《机械设计》中关于平面机构的自由度问题。由于一般机构的原动件都是与机架相连的,对于这样的原动件,一般只能给定一个独立的运动参数。所以在此情况下,为了使机构具有确定的运动,则机构的原动件数目应等于机构的自由度的数目,这就是机构具有确定运动的条件。当机构不满足这一条件时,如果机构的原动件数目小于机构的自由度,机构的运动将不完全确定。当原动件数大于机构的自由度,则将导致机构中最薄弱的环节的损坏。不过当机构原动件的数目小于机构的自由度时,机构的运动也并不是毫无规律地随意乱动,而这时机构的运动将遵循最小阻力定律,即优先沿阻力最小的方向运动(摘自西北工业大学机械原理及机械零件教研室主编的《机械原理》)。
自由度的计算方法:
接下来以下图平面四连杆机构为例,介绍机构自由度数的计算方法:
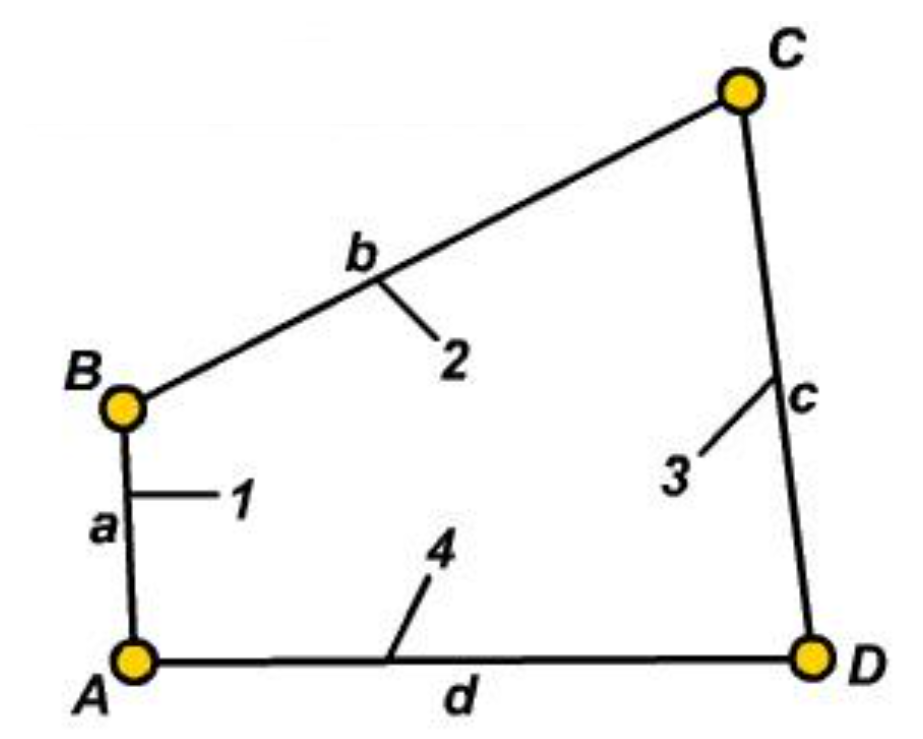
图1 平面四连杆机构简图
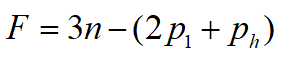
平面空间中一个构件的自由度数为3,现共有4个构件,其中d为机架,固定于地面,则活动构件数目为3,共有四个转动副,每个转动副提供两个约束,则其自由数为:
![]()
其中曲柄为原动件,原动件数目正好等于自由度数,机构具有确定运动。
那么,对于在ABAQUS中进行多刚体系统动力学分析而言,其自由度的计算该如何进行?以下图两构件模型为例。
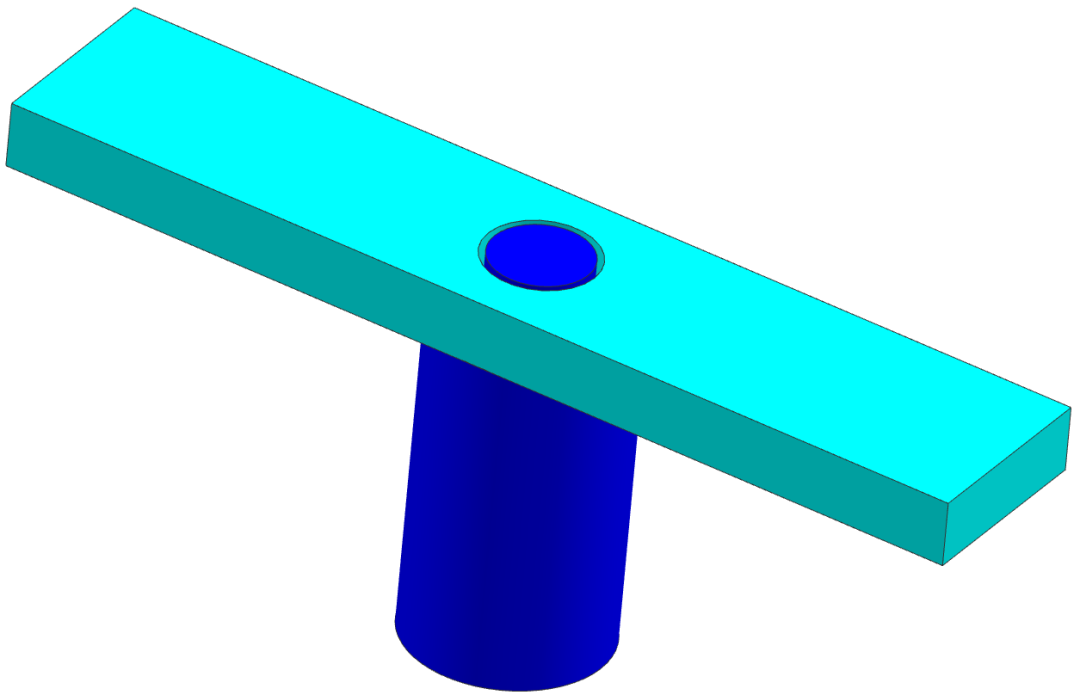
图2 几何模型
对于空间三维模型,一个零件具有6个自由度,即三个平动自由度和三个转动自由度,那么,上图中在自由状态下共有12个自由度。在interaction模块,将青色部件与蓝色部件设定为刚体,为青色部件与蓝色部件之间添加转动副,在Load模块对下侧刚体施加固定约束。其中,转动副自由度会引入5个约束,固定约束会引入6个约束。则系统自由度数为:
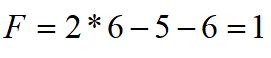
因此模型具有确定的运动,通过分析可得如下位移云图:

















 1112
1112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









