







7.6 去除运动模糊
运动模糊是由于相机或拍摄对象的运动而导致的图像模糊效果。为了实现图像增强,可以采用去除运动模糊的方法,恢复图像的清晰度和细节。
7.6.1 边缘
基于边缘的方法(Edge-based Methods)是图像中的重要特征,可以用于恢复清晰图像。边缘基于方法利用边缘检测和边缘保持算法来恢复边缘,从而提高图像的清晰度和细节可见性。使用基于边缘的方法的基本思想是通过利用图像中的边缘信息,对模糊图像进行分析和处理,以恢复原始图像的细节和清晰度。以下是使用基于边缘的方法去除运动模糊的简要介绍:
- 边缘检测:首先,使用边缘检测算法(如Sobel、Canny等)对模糊图像进行边缘检测,提取图像中的边缘信息。
- 边缘增强:通过增强提取的边缘信息,突出边缘的细节和清晰度。这可以通过增加边缘的对比度、锐化边缘等方法来实现。
- 逆运算:根据增强后的边缘信息,对模糊图像进行逆滤波或反卷积操作,以恢复原始图像的细节和清晰度。
请注意,基于边缘的方法的具体实现和算法可能因应用场景和要求而有所差异,因此需要根据具体情况进行调整和改进。例如下面是一个使用基于边缘的方法去除运动模糊的简单例子。
实例7-26:使用基于边缘的方法去除运动模糊
源码路径:daima\7\bian.py
import cv2
import numpy as np
def motion_deblur(image, kernel_size, motion_angle):
# 生成运动模糊核
kernel = np.zeros((kernel_size, kernel_size))
center = kernel_size // 2
kernel[center, :] = 1.0 / kernel_size
# 对模糊核进行旋转
M = cv2.getRotationMatrix2D((center, center), -motion_angle, 1.0)
kernel = cv2.warpAffine(kernel, M, (kernel_size, kernel_size))
# 进行逆滤波
restored_image = cv2.filter2D(image, -1, np.linalg.pinv(kernel))
return restored_image
# 读取模糊图像
image = cv2.imread('blurred_image.jpg', cv2.IMREAD_COLOR)
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 进行边缘检测
edges = cv2.Canny(gray_image, 100, 200)
# 增强边缘信息
enhanced_edges = cv2.GaussianBlur(edges, (5, 5), 0)
# 进行逆运算恢复
restored_image = motion_deblur(enhanced_edges, 15, 45)
# 显示模糊图像、边缘图像和恢复后的图像
cv2.imshow('Blurred Image', gray_image)
cv2.imshow('Enhanced Edges', enhanced_edges)
cv2.imshow('Restored Image', restored_image)
cv2.waitKey(0)
cv2.destroyAllWindows()在上述代码中,需要作者根据需要调整参数值。这个例子演示了使用基于边缘的方法去除运动模糊的基本步骤。在实际应用中,您可能需要根据具体情况对边缘信息进行更复杂的处理,以获得更好的结果。执行效果如图7-12所示。
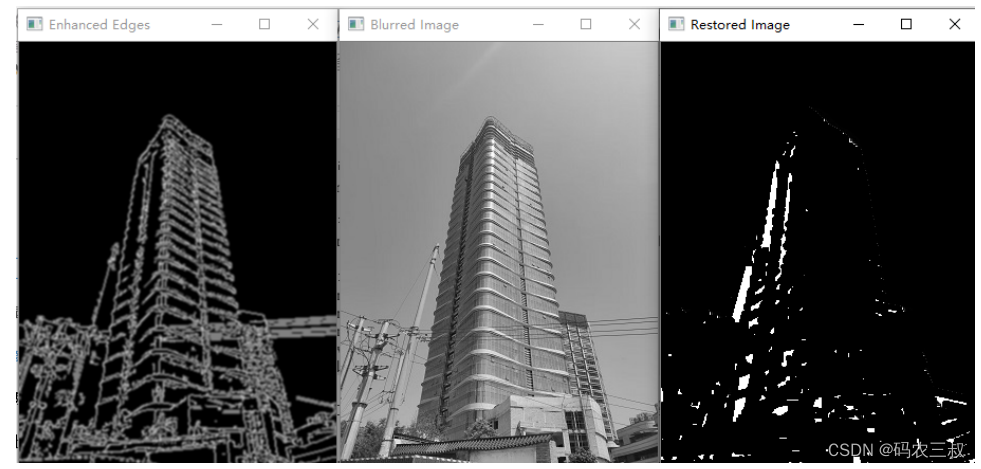
图7-12 执行效果
7.6.2 逆滤波
逆滤波(Inverse Filtering)是一种基本的去模糊方法,它通过计算模糊图像与逆滤波核的卷积来恢复清晰图像。逆滤波的效果受到噪声和伪影的影响,因此在实际应用中可能需要结合其他方法来改善结果。然而,逆滤波方法在实际应用中可能会面临一些挑战,例如噪声的增加和图像估计的不稳定性。因此,通常需要结合其他方法,如正则化技术或约束优化方法,来提高逆滤波的效果。下面将提供一个使用逆滤波方法去除运动模糊的例子。请注意,这个例子可能不是特别复杂,但可以展示逆滤波方法的基本原理。
实例7-27:通过计算模糊图像与逆滤波核的卷积来恢复清晰图像
源码路径:daima\7\ni.py
import cv2
import numpy as np
def motion_deblur(image, kernel_size, motion_angle):
# 生成运动模糊核
kernel = np.zeros((kernel_size, kernel_size))
center = kernel_size // 2
kernel[center, :] = 1.0 / kernel_size
# 对模糊核进行旋转
M = cv2.getRotationMatrix2D((center, center), -motion_angle, 1.0)
kernel = cv2.warpAffine(kernel, M, (kernel_size, kernel_size))
# 进行逆滤波
restored_image = cv2.filter2D(image, -1, np.linalg.pinv(kernel))
return restored_image
# 读取模糊图像
image = cv2.imread('blurred_image.jpg', cv2.IMREAD_COLOR)
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 进行逆滤波恢复
kernel_size = 15 # 模糊核大小
motion_angle = 45 # 运动方向(逆时针旋转角度)
restored_image = motion_deblur(gray_image, kernel_size, motion_angle)
# 显示模糊图像和恢复后的图像
cv2.imshow('Blurred Image', gray_image)
cv2.imshow('Restored Image', restored_image)
cv2.waitKey(0)
cv2.destroyAllWindows()在上述代码中,首先读取模糊图像,并将其转换为灰度图像。然后,通过指定模糊核的大小和运动方向,使用逆滤波方法对图像进行恢复。最后,显示模糊图像和恢复后的图像。请根据需要调整kernel_size和motion_angle的值。请注意,逆滤波方法在处理真实世界的复杂模糊情况时可能效果不理想,因此可能需要结合其他技术或算法来进一步改进结果。
7.6.3 统计方法
统计方法(Statistical Methods)利用多个模糊图像或先验知识进行建模和估计,以恢复清晰图像。这些方法基于图像的统计特性和概率模型,例如最大似然估计、最小二乘法等。方法的基本思想是通过对模糊图像中的像素值进行统计分析,推断出运动模糊的参数,并进行逆运算来恢复原始图像。以下是使用统计方法去除运动模糊的简要介绍:
- 统计分析:对模糊图像中的像素值进行统计分析,例如利用图像中的边缘信息或图像梯度信息来推断运动模糊的方向和程度。
- 参数估计:基于统计分析的结果,估计运动模糊的参数,如模糊核的长度和方向。
- 逆运算:应用逆运算来恢复原始图像。根据估计的运动模糊参数,对模糊图像进行逆滤波或反卷积操作,尽可能还原原始图像的细节。
请注意,统计方法的具体实现和算法可能因应用场景和要求而有所差异,因此需要根据具体情况进行调整和改进。例如下面是一个使用统计方法去除运动模糊的简单例子。
实例7-28:使用统计方法去除运动模糊
源码路径:daima\7\jin.py
import cv2
import numpy as np
def motion_deblur(image, kernel_size, motion_angle):
# 生成运动模糊核
kernel = np.zeros((kernel_size, kernel_size))
center = kernel_size // 2
kernel[center, :] = 1.0 / kernel_size
# 对模糊核进行旋转
M = cv2.getRotationMatrix2D((center, center), -motion_angle, 1.0)
kernel = cv2.warpAffine(kernel, M, (kernel_size, kernel_size))
# 进行逆滤波
restored_image = cv2.filter2D(image, -1, np.linalg.pinv(kernel))
return restored_image
# 读取模糊图像
image = cv2.imread('blurred_image.jpg', cv2.IMREAD_COLOR)
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 进行统计分析和参数估计
kernel_size = 15 # 模糊核大小
motion_angle = 45 # 运动方向(逆时针旋转角度)
# 进行逆运算恢复
restored_image = motion_deblur(gray_image, kernel_size, motion_angle)
# 显示模糊图像和恢复后的图像
cv2.imshow('Blurred Image', gray_image)
cv2.imshow('Restored Image', restored_image)
cv2.waitKey(0)
cv2.destroyAllWindows()在上述代码中,需要读者根据需要调整kernel_size和motion_angle的值。这个例子是一个简化的示例,演示了使用统计方法去除运动模糊的基本原理。实际应用中,您可能需要根据具体情况进行更详细的统计分析和参数估计,以获得更好的结果。
7.6.4 盲去卷积
基于盲去卷积的方法(Blind Deconvolution)是一种无需事先知道模糊核的方法,它试图通过估计模糊核和清晰图像来恢复原始图像。盲去卷积方法需要较高的计算复杂度,并且对于复杂的模糊情况可能存在困难。盲去卷积方法的核心思想是通过迭代优化过程来估计模糊核和清晰图像,以最小化重建图像与模糊图像之间的差异。例如下面是一个使用盲去卷积方法去除运动模糊的例子。
实例7-29:使用盲去卷积方法去除运动模糊
源码路径:daima\7\mang.py
import cv2
import numpy as np
from scipy.signal import convolve2d
def blind_deconvolution(image, kernel_size, iterations):
# 初始化模糊核和清晰图像
kernel = np.zeros((kernel_size, kernel_size))
kernel[kernel_size//2, :] = 1.0 / kernel_size
# 盲去卷积迭代过程
for _ in range(iterations):
# 估计模糊图像
blurred_image = convolve2d(image, kernel, mode='same', boundary='symm', fillvalue=0)
# 更新模糊核
restored_image = convolve2d(blurred_image, np.rot90(kernel, 2), mode='same', boundary='symm', fillvalue=0)
return restored_image
# 读取模糊图像
image = cv2.imread('blurred_image.jpg', cv2.IMREAD_COLOR)
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 进行盲去卷积恢复
kernel_size = 15 # 模糊核大小
iterations = 10 # 迭代次数
restored_image = blind_deconvolution(gray_image, kernel_size, iterations)
# 显示模糊图像和恢复后的图像
cv2.imshow('Blurred Image', gray_image)
cv2.imshow('Restored Image', restored_image)
cv2.waitKey(0)
cv2.destroyAllWindows()在上述代码中,使用运动模糊的盲去卷积方法来恢复图像。这种方法仅适用于特定类型的模糊,并且可能需要根据实际情况进行调整以获得更好的结果。

















 1378
1378











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











