







 本文介绍了AUBOPE协作机器人使用Python SDK进行高级编程的方法,涵盖环境版本、SDK接口数据和函数示例,以及Windows系统下的DLL库配置和机械臂的控制操作。同时,提供了在IDLE、PyCharm中运行Python脚本的步骤,并鼓励读者尝试任务拓展,学习更多接口应用。
本文介绍了AUBOPE协作机器人使用Python SDK进行高级编程的方法,涵盖环境版本、SDK接口数据和函数示例,以及Windows系统下的DLL库配置和机械臂的控制操作。同时,提供了在IDLE、PyCharm中运行Python脚本的步骤,并鼓励读者尝试任务拓展,学习更多接口应用。
目录
一、简介
大家好,本篇文章主要针对AUBOPE系统基于Python编程语言的SDK开发方面进行讲解。掌握Windows系统下Python环境的搭建,掌握机器人Python编程接口的开发流程。
AUBOPE SDK Python编程
二、环境版本
- 主机系统版本:Windwos10 64位
- 虚拟机版本:VMware Workstation 16 Pro
- 示教器版本:AUBOPE V4.5.44以上
- Python版本:3.7.8
- SDK版本:auboi5-sdk-for-windows-python3.7-x64-v1.5.2
- 集成开发环境:IDLE、PyCharm
三、Python SDK接口简介
1.Python SDK接口数据
1.机械臂运动
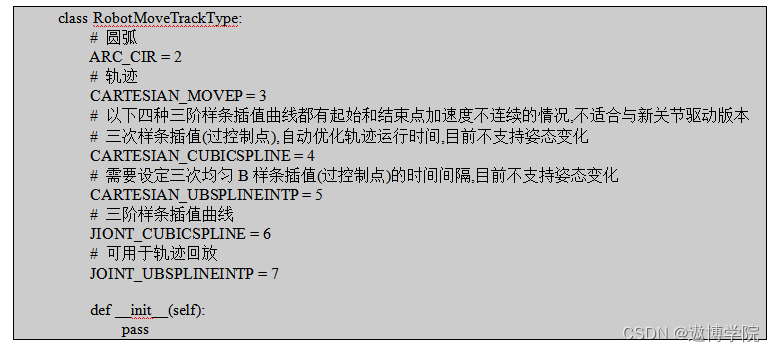
1.1 RobotMoveTrackType 轨迹运动类型
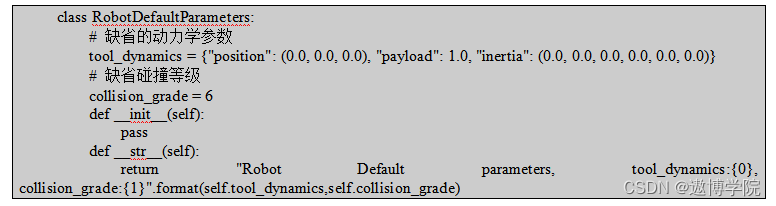
1.2 RobotDefaultParameters 机械臂默认参数
1.3 RobotStatus 机械臂运动状态
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 997
997

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









