






gtsam一个高效的后端图优化库。
- 基础知识
先要理解三个概念,因子图、贝叶斯网络、贝叶斯树。
- 1因子图
具有多变量的全局函数因子分解,得到几个局部函数的乘积,以此为基础得到的一个双向图叫做因子图.
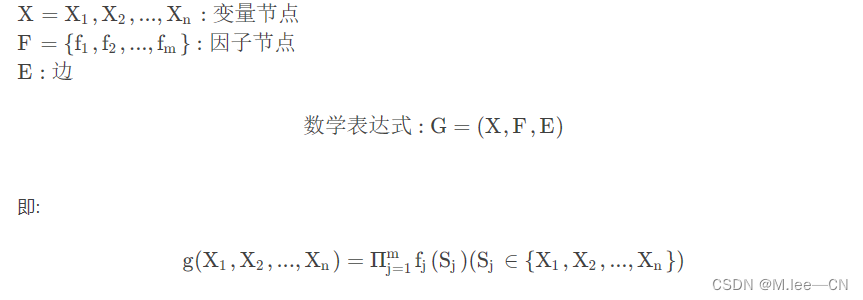
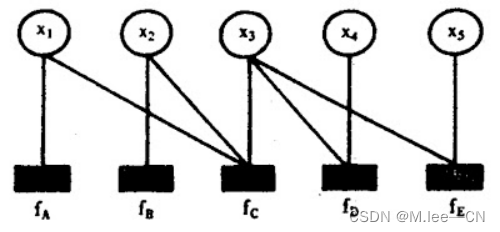
用图表示


其对应因子图为:
顶点:变量节点或函数节点,边线表示它们之间的函数关系。
因子图,无向图,与雅克比矩阵对应。
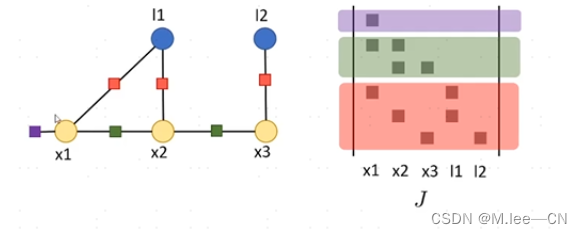
马尔科夫随机场,与信息矩阵对应。
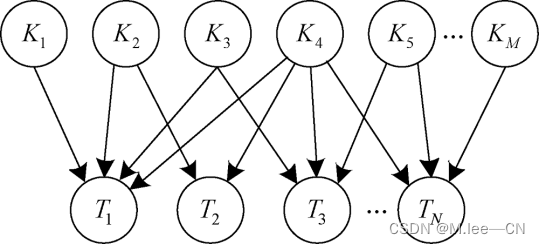
- 2贝叶斯网络
贝叶斯网络(Bayesian network),又称信念网络(Belief Network),或有向无环图模型(directed acyclic graphical model),是一种概率图模型,于1985年由Judea Pearl首先提出。它是一种模拟人类推理过程中因果关系的不确定性处理模型,其网络拓朴结构是一个有向无环图(DAG)。
因子图通过消元算法,生成贝叶斯网络和平方根信息矩阵R。
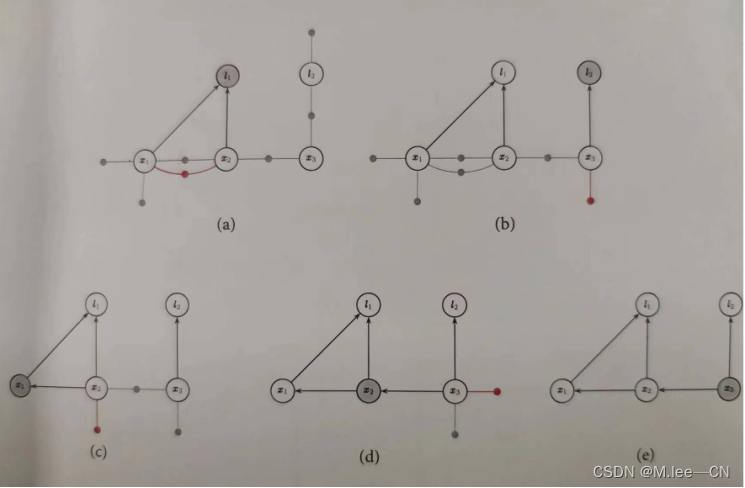
灰色的为被消去的变量,红色为新产生的因子。 消元顺序为l1、l2、x1、x2、x3。
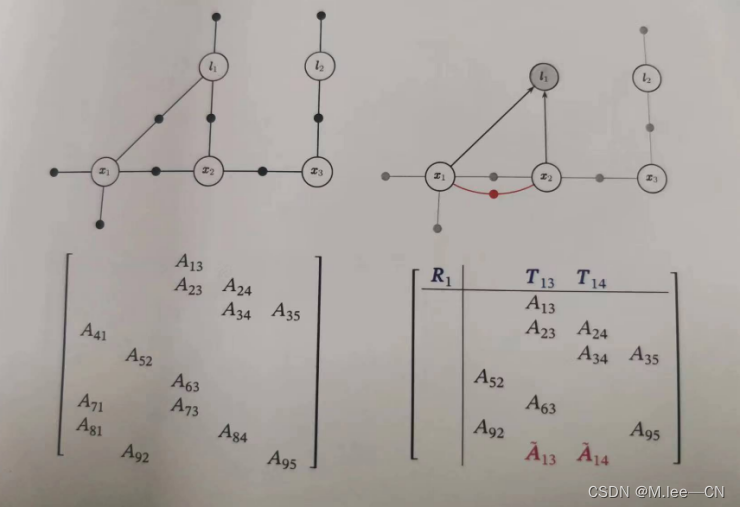
这里用的方法为多波前乔里斯基分解,其实就是QR分解加舒尔补。
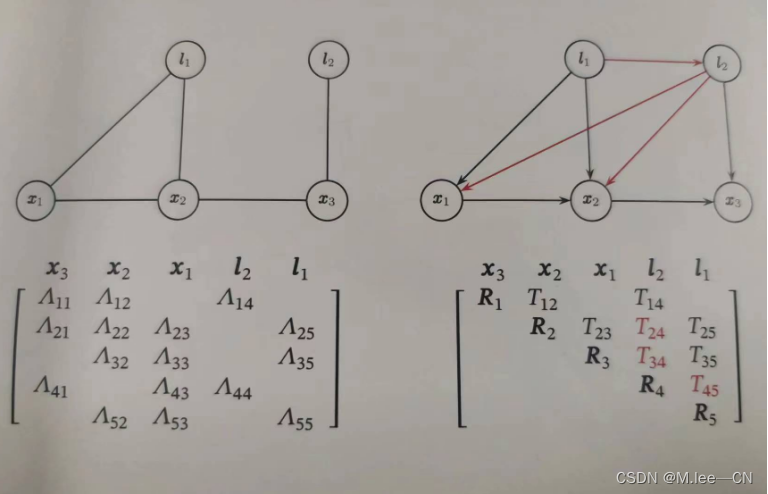
消元顺序l1、l2、x1、x2、x3。
R矩阵可以增量分解,可以很容易进行边缘化。
固定滞后平滑器,只维护最后N个状态,其它的都边缘化掉。
- 3 贝叶斯树
同时消元的过程也伴随着贝叶斯树的生成。贝叶斯树的生成原理,请查下如下博客https://blog.csdn.net/deepbodhi/article/details/119877754。
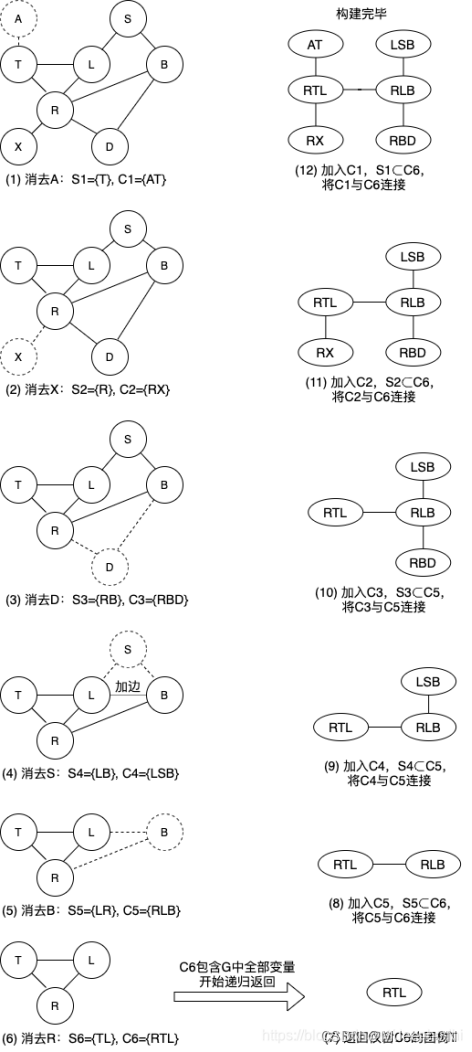
非线性滤波与平滑:每添加一个因子,贝叶斯树只需要部分需要更新(增量更新)。当前端新加入一个观察或者关键帧时,产生一个新的因子f(xi, xj),首先找到所有受影响的团,为起点是包含xi或 xj的团,终点是根团。含xi或 xj的团以下的支树,以及任何不包含含xi或 xj的支树不受影响。
2 工作原理
图优化,维护的是一个由节点和边组成的连接图。当前端新加入一个观察或者关键帧时,向图中添加一个边、或一个边和一个节点。此时图中需要判断是否产生了新的回环,如果产生,则构建最小二乘法,优化此回环。但此回环中的节点可能也处在别的环路中,因此需要将图中所有回环都进行一次优化。计算量可观。
gtsam维护的一颗贝叶斯树。当前端新加入一个观察或者关键帧时,产生一个新的因子f(xi, xj),首先找到所有受影响的团,为起点是包含xi或 xj的团,终点是根团。含xi或 xj的团以下的支树,以及任何不包含含xi或 xj的支树不受影响。
然后更新贝叶斯树,将树中受影响的部分转换回因子图,将新的因子添加进去。再将这些临时因子图通过消元算法重新消元,生产成新的贝叶斯树,且之前没有受影响的支树也可以重新添加回去。
里程计添加关键帧时,回环添加新的观测时,不区分,一样进行上面的处理找到贝叶斯树中需要更新的部分。然后重新因子化,添加新的因子,再消元。消元的过程产生平方根信息矩阵,求解更新量。但不是每添加一个因子都需要进行上述过程,在新加因子少时,可以用R矩阵的增量分解方法直接求解更新量。固定滞后平滑滤波,感觉对里程计添加顺序节点很有用。
求解出的更新量,如要更新到每个节点的位姿吗?在每一个团上,我们都可以检测变量估计之间的差值,解的更新向下传播,直到差值小于一定的阈值,传播才停止。
3. 部分细节
3.1 消元顺序
近似最小度算法。度是指图中节点连接边的数量。最小度算法,指消元优先消去连接边最少的节点。这种方法,可以尽量减少边的填充(消元过程中相互独立的节点产生新的依赖)。
同时为了保证未来更新贝叶斯树时,受影响的部分尽量少,强制将最近访问的节点放到靠近尾部的地方即根团。具体原理请阅读论文《An_Approximate_Minimum_Degree_Ordering_Algorithm》。
3.2 整体优化和增量优化
整体优化和增量优化切换,固定N步,就整体优化一次。















 1932
1932











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









