









今天,项目中利用aruco来识别二维码来确定相机姿态,我就详细研究了一下相机坐标系。
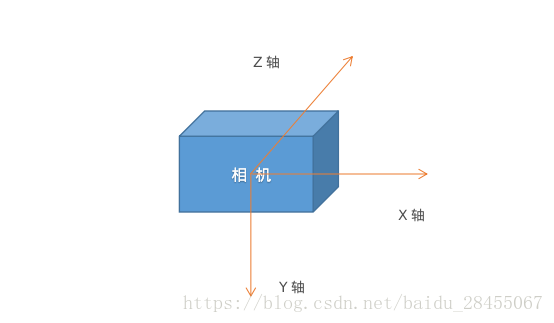
(一)相机坐标系
(二)如何在ROS中进行四元数和欧拉角转化
- 将geometry_msgs::Quaternion转化为tf::Quaternion类型
tf::Quaternion quat;
tf::quaternionMsgToTF(bucket_mark_poses->orientation,quat);
- 通过tf::Quaternion,将四元数转化为欧拉角
double roll, pitch, yaw;
tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
mark_rpy_.x = roll; //绕x轴
mark_rpy_.y = pitch; //绕y轴
mark_rpy_.z = yaw; //绕z轴
//发布欧拉角的主题,消息类型为<geometry_msgs::Vector3>
rpy_pub_.publish(mark_rpy_);
```javascript
3. 进行tf::Transform变换
tf::Vector3 dock2getPonint = get_point_ - point_dock_;
double angle = dock2getPonint.angle(tf::Vector3(1, 0, 0 ));
tf::Vector3 angle_sign = dock2getPonint.cross(tf::Vector3(1, 0, 0));
angle = angle_sign.z() >= 0 ? -angle : angle;
tf::Quaternion Rotation;
Rotation.setRotation(tf::Vector3(1,0,0),angle);
tf::Transform Dock;
Dock.setOrigin(point_dock_);
Dock.setRotation(Rotation);
tf::Transform dock2robot = pose.inverse() * Dock;
* 参考
[TF库说明](http://mirror.umd.edu/roswiki/doc/diamondback/api/tf/html/c++/namespacetf.html#a146c64492ebe3407729ea6f7246529f6%20tf_api%E8%AF%B4%E6%98%8E)















 723
723











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









