






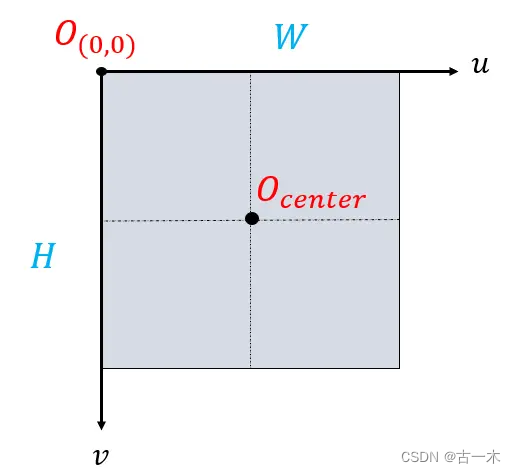
1.像素坐标系
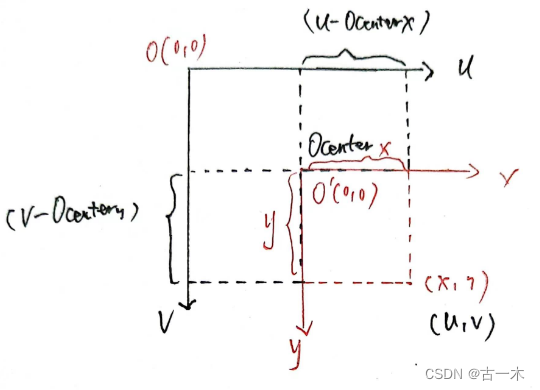
像素坐标系u-v原点位于图像左上角,u轴为水平向右,v轴为垂直向下。
中心像素坐标:
;
;
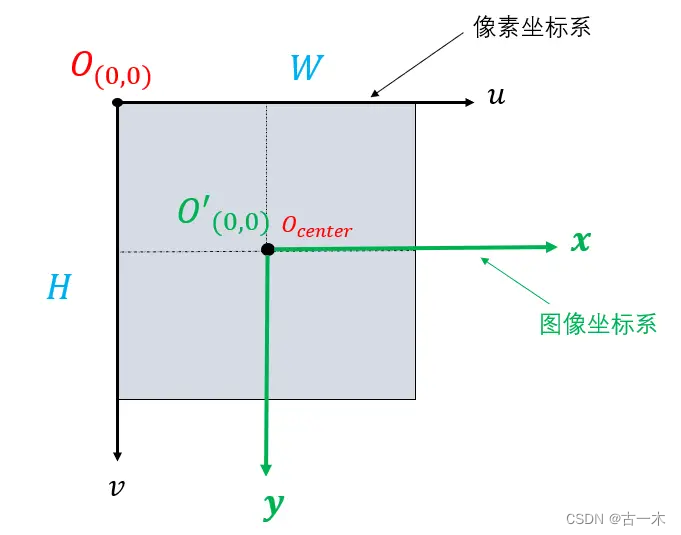
2.图像坐标系
图像坐标系x-y的原点是像素坐标系的中点。
图像坐标系原点在像素坐标系中心位置。从像素坐标上来看,天然相差个像素值。
3.像素坐标系和图像坐标系转换
图像坐标系单位为mm, dx和dy分别表示每个像素在横轴x和纵轴y的物理尺寸,也就是分辨率,代表一个像素对应的实际距离(mm).
设图像坐标系中有一点(x,y),在像素坐标系中对应的坐标为(u,v),则有下列计算公式:
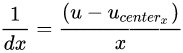
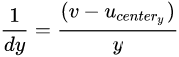
这里的x和y是图像坐标系的坐标,单位是mm,也就是表示(x,y)坐标在像素坐标系下占据(u-Ocenterx)、(v-ocentery)个像素点,则一个像素点占据的mm数可以通过以上公式计算出来。
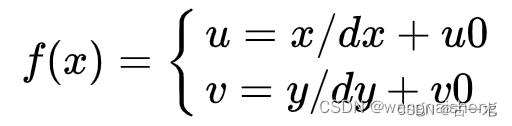
设物理坐标系单位为毫米(mm),那么dx单位为毫米/像素, 那么x/dx的单位就是像素了,即和u的单位一样。
图像坐标系和像素坐标系的关系--矩阵形式
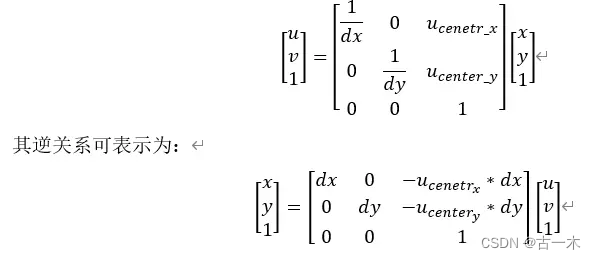
写成等式形式就是:
u0、v0分别对应上述公式中的Ocenterx、Ocentery。
3.相机坐标系
相机坐标系到图像坐标系是一个三维坐标到二维坐标(3D->2D)的过程,称之为透视投影变换。
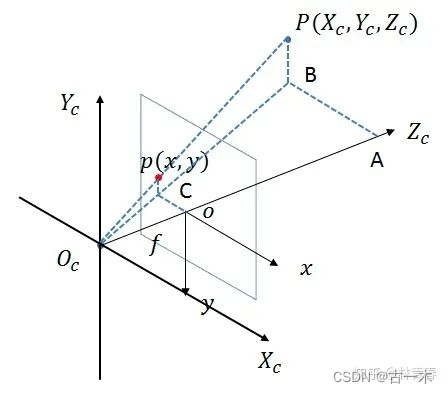
上图中Oc是相机坐标系的原点,o点是图像坐标系的原点,p(x,y)是图像坐标系中的点,P(Xc,Yc,Zc)是p点在相机坐标系中对应的点。
根据相似三角形可以得到以下关系:

4.世界坐标系
世界坐标(Xw,Yw,Zw)与相机坐标(Xc,Yc,Zc)同为三维坐标(右手系,三轴互相垂直),两者之间转换需要考虑不到旋转向量R和平移向量T,即有下式:
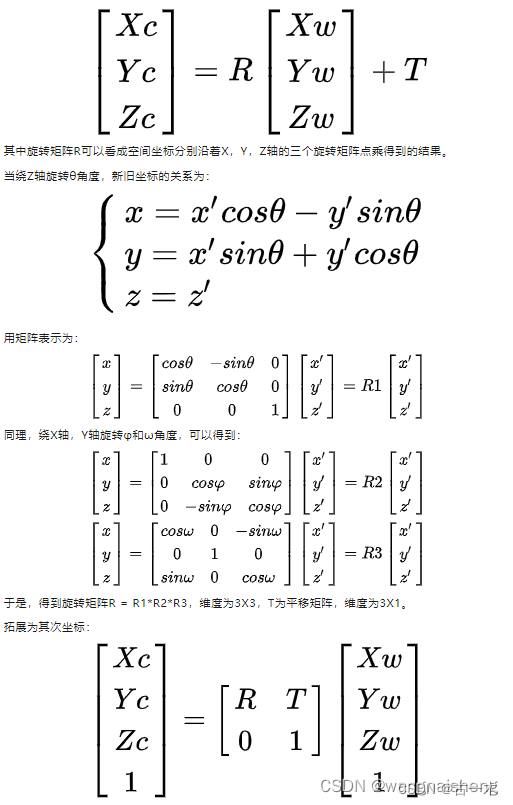
5.世界坐标系到像素坐标系
综合上面推导的过程,世界坐标(Xw,Yw,Zw)—>相机坐标(Xc,Yc,Zc)—>图像坐标(x,y)—>像素坐标(u,v),以上顺序用矩阵表示为不断左乘下一步,即:

上图中右边的前两个矩阵是相机内参,第三个矩阵是相机外参。

转至:机器视觉中三大坐标系及其相互关系;世界、相机、图像、像素坐标系之间的关系_图像坐标-CSDN博客 【12】医学图像——像素坐标系和图像坐标系 - 简书















 1664
1664











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









