






首先,本文大部分思路取自b站视频:三维重建第九课:LM(二)优化方法演进。
在介绍牛顿法之前,笔者要先聊一下最经典的梯度下降法。
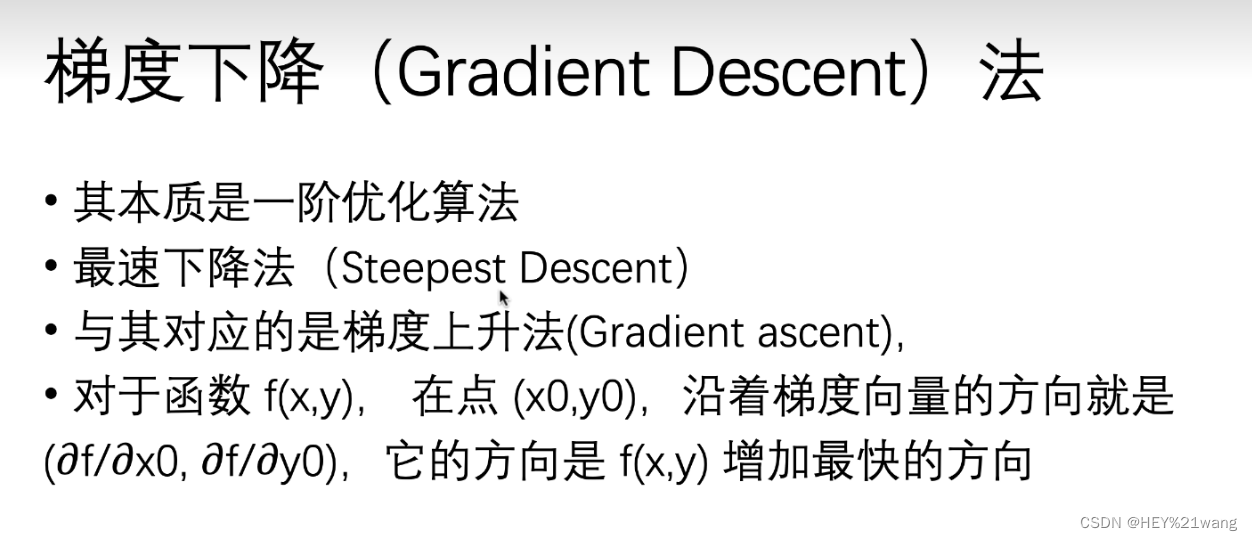
对目标函数的目标点处进行求导,所得的方向就是梯度下降的方向。
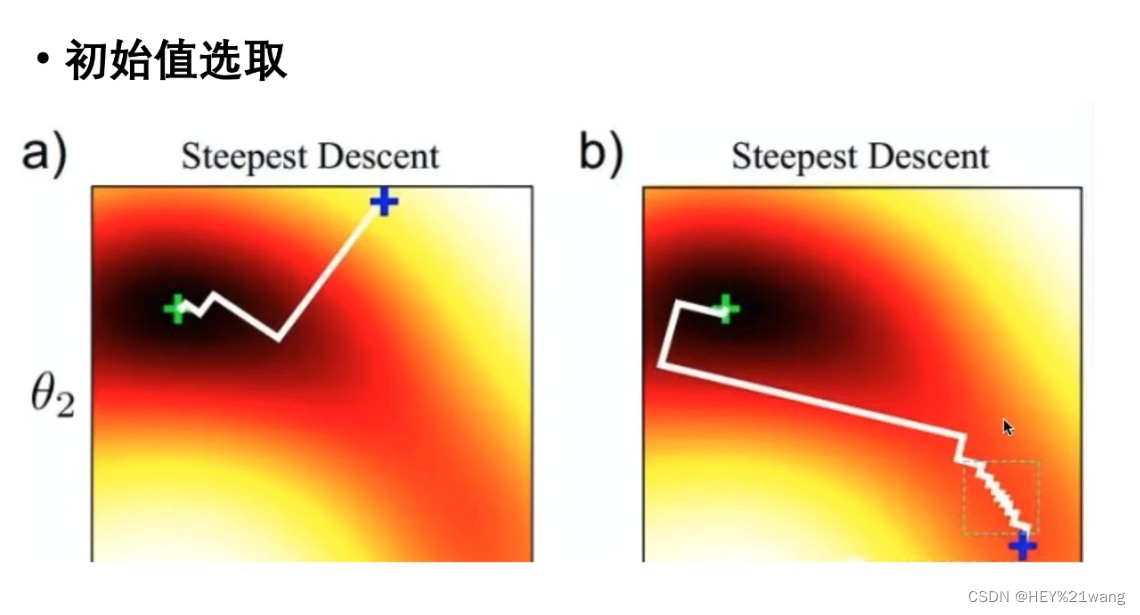 但是梯度下降方法的缺点也十分明显,如果初始值选取的位置不理想就可能使迭代次数大幅增加,影响效率。
但是梯度下降方法的缺点也十分明显,如果初始值选取的位置不理想就可能使迭代次数大幅增加,影响效率。
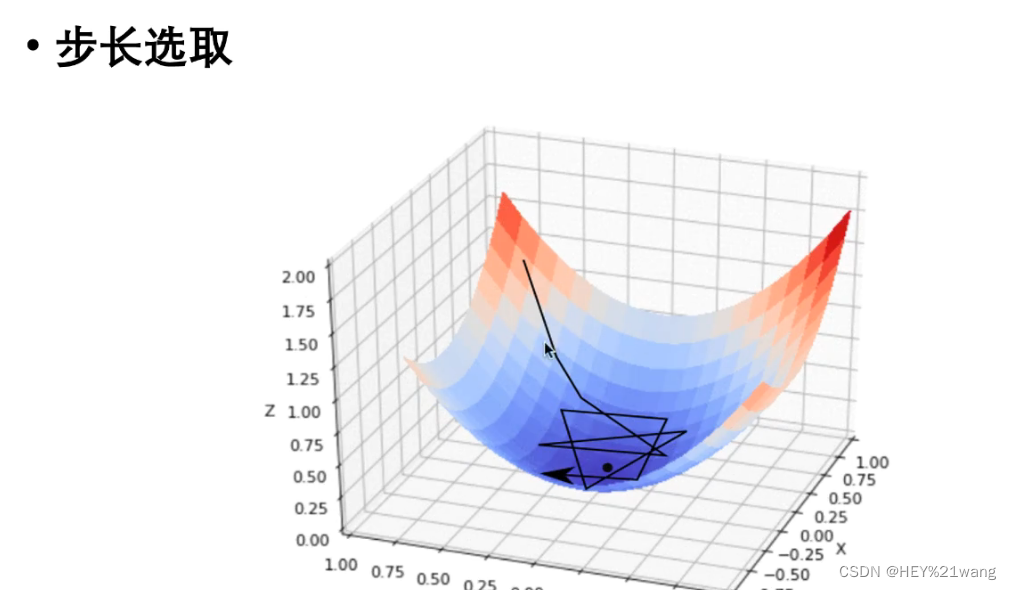 同时,梯度下降的步长选取也是一个问题,如果步长选取过小会导致迭代次数增加,步长选取过长就会导致上图的情况,无法获得最优解。
同时,梯度下降的步长选取也是一个问题,如果步长选取过小会导致迭代次数增加,步长选取过长就会导致上图的情况,无法获得最优解。
牛顿法:
J(x)为雅克比矩阵,H(x)为海森矩阵
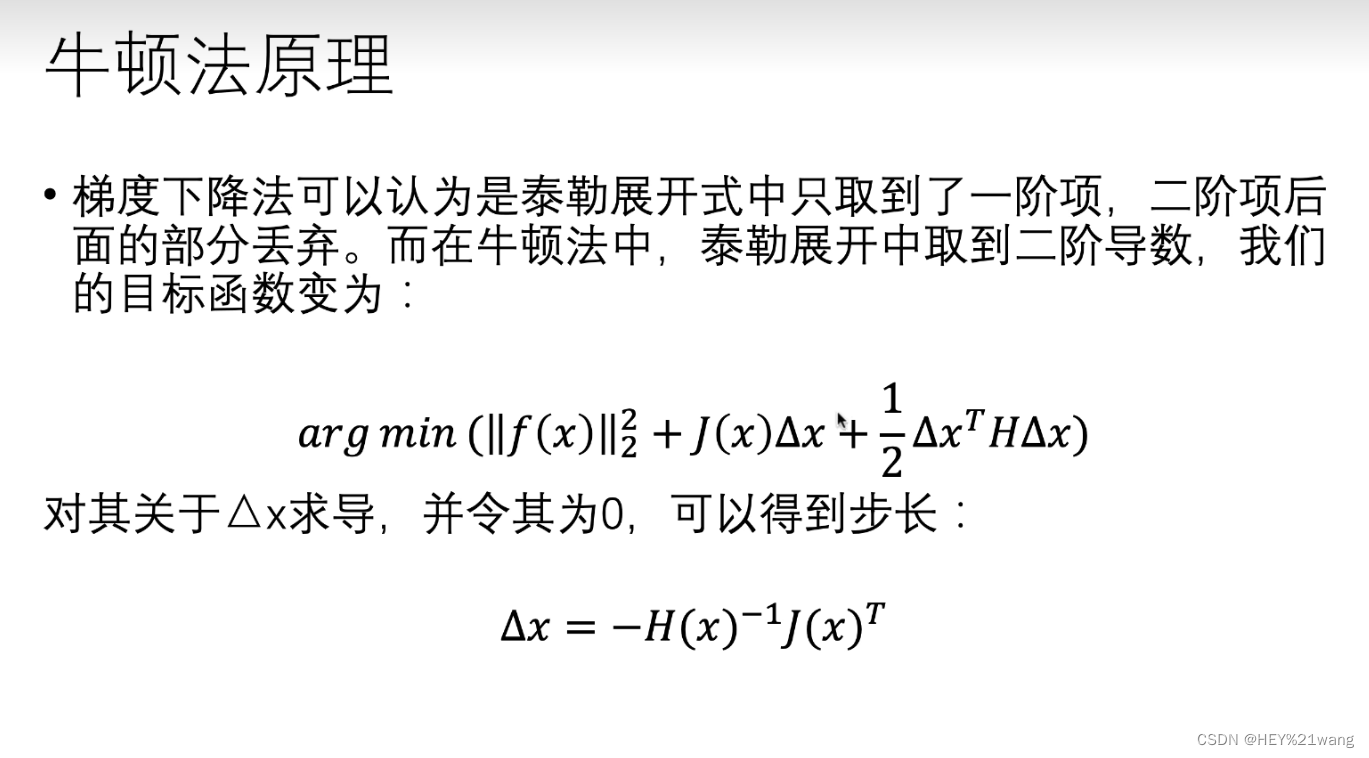
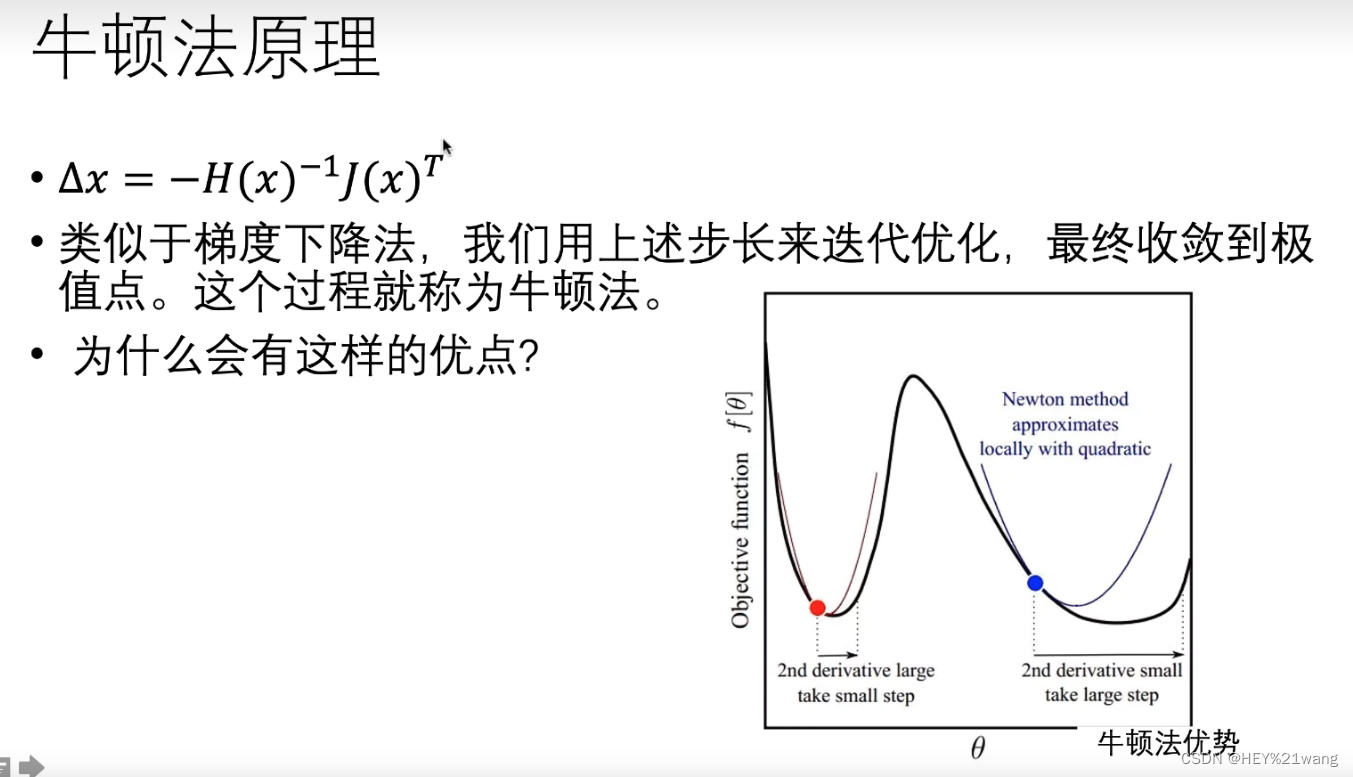
牛顿法的优势是:在曲率变化大时(红点处),H(x)变大,这样步幅△x变小,在曲率变化小时(蓝点处)△x变大,这样就可以保证在保证了效率的同时具有良好的鲁棒性。
缺点就是求海森矩阵的计算量太大了。
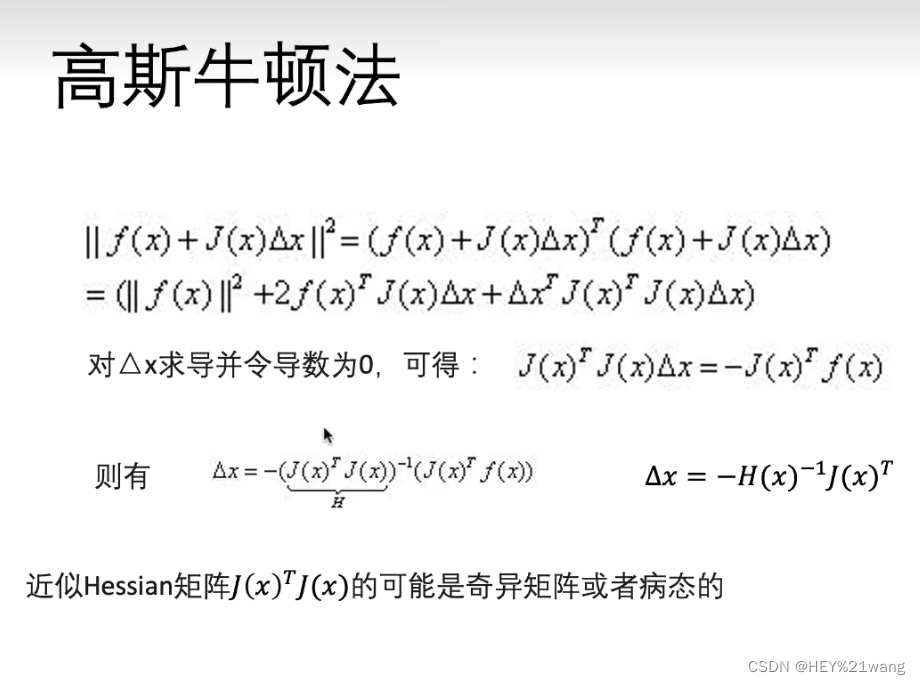
高斯牛顿法将J(x)TJ(x)近似等于H(x)
LM算法:
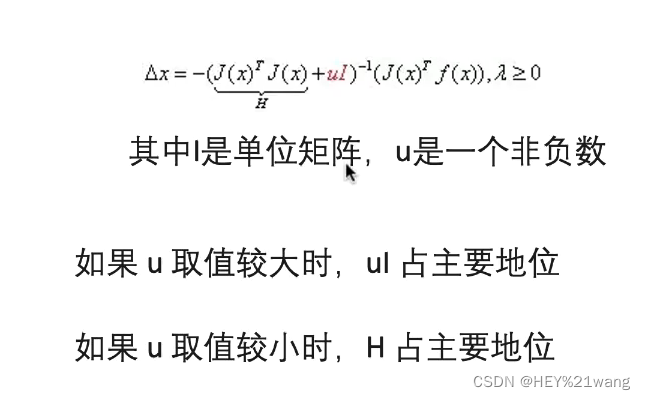
u取值较大时,我们可以将LM算法看做是一阶的梯度下降方法。当u取值较小时,我们可以将LM算法看成高斯牛顿法。这种方法牺牲了效率但是更加的鲁棒。
LM算法的核心思想是在每次迭代中,用一个二次函数来近似目标函数,并在该二次函数上求解最优步长。
LM算法的迭代公式为:
xk+1=xk−(Jk⊤Jk+μI)−1gk
其中,xk是第k次迭代的参数向量,Jk是目标函数关于参数的雅可比矩阵,gk是目标函数关于参数的梯度向量,μ是一个正则化因子,I是单位矩阵。
如果步长Δx过大,会导致目标函数的值增大,而不是减小。这时候,我们需要调整μ的值,使得步长变小,从而保证目标函数的下降。
根据LM算法的迭代公式,我们可以看到,当μ很大时,(Jk⊤Jk+μI)−1接近于I/μ,那么步长就变成了
Δx≈−1/μ*gk
这相当于最速下降法的步长,而最速下降法的步长随着μ的增大而减小。
因此,如果步长过大导致判断值p远远小于1,那么此时应当将置信区间减少,也就是将μ增大,从而缩小步长,使得目标函数能够有效地下降。















 663
663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









