






硬性要求:8—10G的显存(pointpillar运行刚需),可以用nvidia-smi查询
测试环境:ubuntu 18.04 CUDA 11.1 pytorch1.8.1
1、安装openpcdet运行环境
githut链接
2、安装ROS
我用的鱼香大佬的一键安装链接,第一次安装失败,不信邪第二次就直接成功了。
ROS安装链接
3、然后是编译环境,下载代码
mkdir -p ~/pointpillars_ros/src
cd pointpillars_ros/src
git clone https://github.com/BIT-DYN/pointpillars_ros
cd ..
4、下载相关库(其实好多库在鱼香大佬的一键安装ROS里面已经下载好了)
conda activate openpcdet # 激活openpcdet的环境
pip install --user rospkg catkin_pkg
pip install pyquaternion
sudo apt-get install ros-kinetic-pcl-ros
sudo apt-get install ros-kinetic-jsk-recognition-msgs # 之前找的一些相关帖子都是装的ros-kinetic-jsk-recognition-msg,然后就一直无法定位,等我去搜索这个库的时候好像是最后少了一个s,最后搞鼓半天发现已经安装好了
sudo apt-get install ros-kinetic-jsk-rviz-plugins
catkin_make # 注意编译的位置 在src同级目录
5、复制openpcdet的文件
我是把所有文件都复制下来了
6、修改其中的ros.py文件
sys.path.append("/home/optobot-03/pointpillars_ros-main/src/pointpillars_ros") # 第8行
config_path = rospy.get_param("/config_path", "/home/optobot-03/pointpillars_ros-main/src/pointpillars_ros/tools/cfgs/kitti_models/pointpillar.yaml")
ckpt_path = rospy.get_param("/ckpt_path", "/home/optobot-03/pointpillars_ros-main/src/pointpillars_ros/tools/models/pointpillar_7728.pth") # 第54、55行
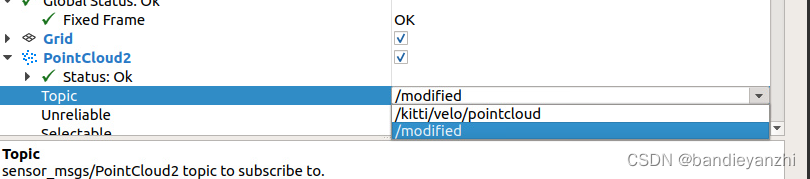
7、修改.rviz文件
修改话题topic,如果是kitti可以直接抄我的:
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /PointCloud21
- /BoundingBoxArray1
Splitter Ratio: 0.5
Tree Height: 235
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: PointCloud2
Preferences:
PromptSaveOnExit: true
Toolbars:
toolButtonStyle: 2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 26.235191345214844
Min Value: -12.199440002441406
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Min Color: 0; 0; 0
Name: PointCloud2
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.05000000074505806
Style: Squares
Topic: /kitti/velo/pointcloud
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: false
- Class: rviz/Axes
Enabled: true
Length: 1
Name: Axes
Radius: 0.10000000149011612
Reference Frame: <Fixed Frame>
Value: true
Topic: /modified
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Class: jsk_rviz_plugin/BoundingBoxArray
Enabled: true
Name: BoundingBoxArray
Topic: /detections
Unreliable: false
Value: true
Queue Size: 10
alpha: 0.800000011920929
color: 25; 255; 0
coloring: Flat color
line width: 0.20000000298023224
only edge: true
show coords: false
- Class: rviz/Image
Enabled: true
Image Topic: /kitti/camera_color_left/image_raw
Max Value: 1
Median window: 5
Min Value: 0
Name: Image
Normalize Range: true
Queue Size: 2
Transport Hint: raw
Unreliable: false
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: velo_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Theta std deviation: 0.2617993950843811
Topic: /initialpose
X std deviation: 0.5
Y std deviation: 0.5
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 61.30393600463867
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 11.016645431518555
Y: -6.342355728149414
Z: 3.211975574493408
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 1.124796748161316
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 3.210404872894287
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 1011
Hide Left Dock: false
Hide Right Dock: false
Image:
collapsed: false
QMainWindow State: 000000ff00000000fd00000004000000000000031400000354fc0200000009fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d00000176000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000000a0049006d00610067006501000001b9000001d80000001600ffffff000000010000010f00000354fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003d00000354000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003ffc0100000002fb0000000800540069006d0065010000000000000780000002eb00fffffffb0000000800540069006d00650100000000000004500000000000000000000004660000035400000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1920
X: 0
Y: 38
参考链接
8、修改.launch文件
也是参考上方这个链接
<launch>
<node pkg="rosbag" type="play" name="player" output="log" args="-l /media/optobot-03/document/1/2022-10-15-15-01-20.bag" /> # 只需要改这一行就行
<node name="pointpillars_ros" type="ros.py" pkg="pointpillars_ros" output="screen"/>
<node type="rviz" name="rviz" pkg="rviz" args="-d $(find pointpillars_ros)/launch/pointpillars.rviz" />
</launch>
9、运行
在src目录的上一级运行
conda activate openpcdet
source ~/pointpillars_ros/devel/setup.bash
roslaunch pointpillars_ros pointpillars.launch
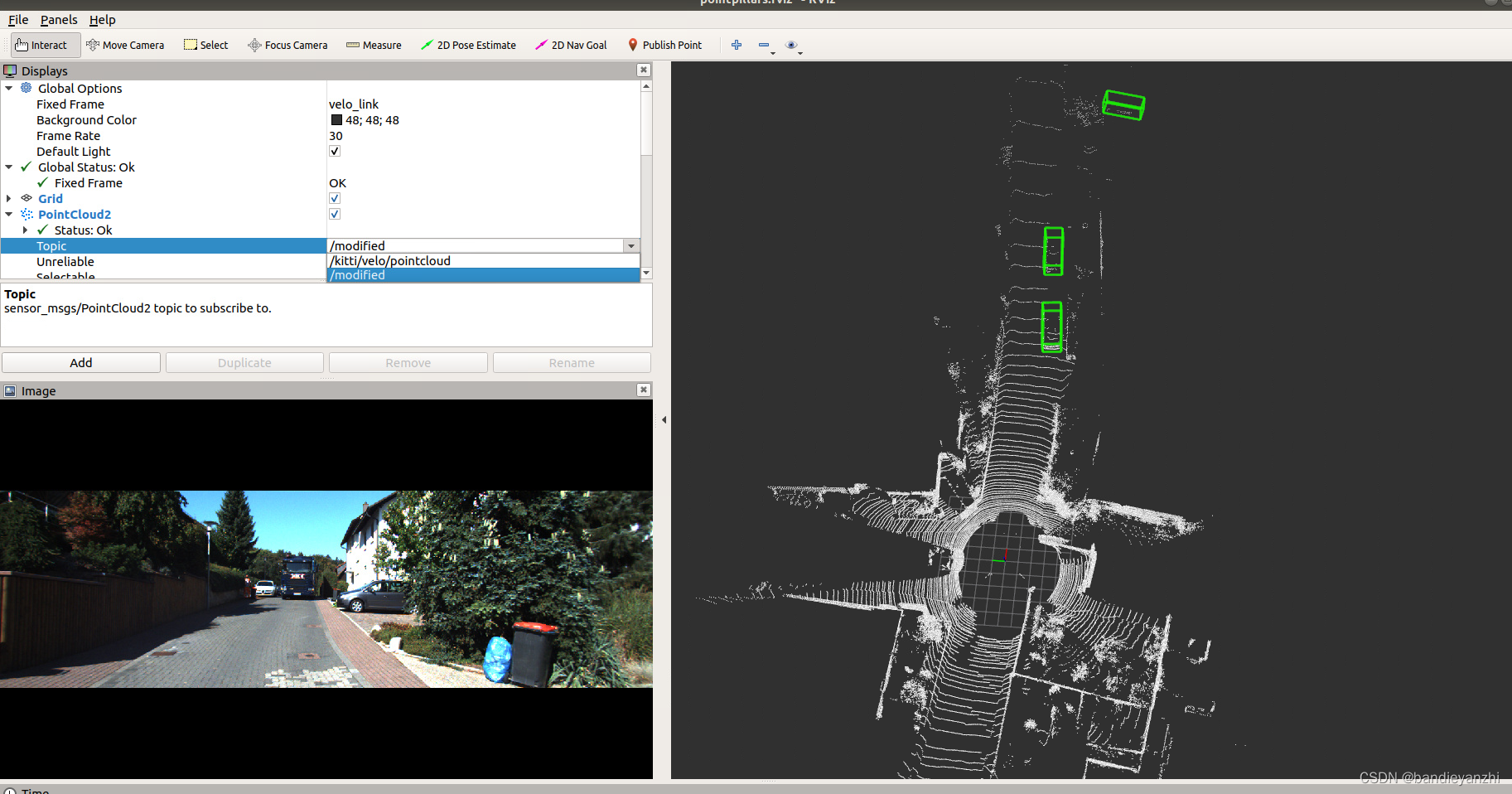
注意把这里改成/modified
10、结果
个人感觉这个包跑的有点快,我又根据这个bag包自己录了个0.5倍速的包,用的指令 record my desktop.














 3428
3428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









