







1.准备文件
2011_09_30_calib.zip
2011_09_30_drive_0016_extract.zip
2011_09_30_drive_0016_sync.zip
kitti2bag.py
kitti所有相关文件可私信我发送链接
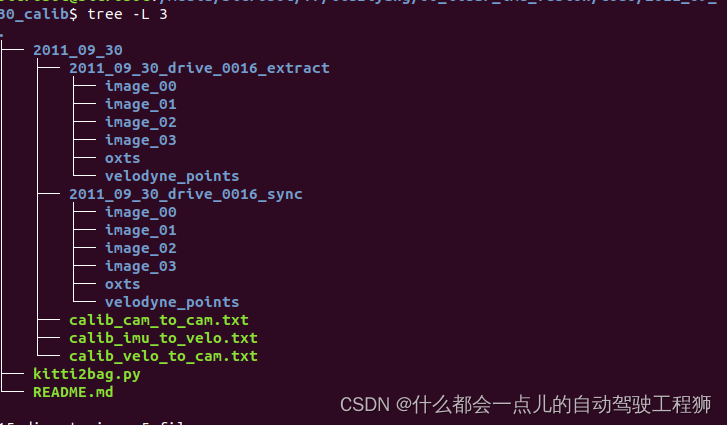
2.新建文件夹2011_09_30_calib,将上述文件解压并按照以下层级组合
 |#######################| Elapsed Time: 0:00:01 Time: 0:00:01
Exporting velodyne data
100% (279 of 279) |#######################| Elapsed Time: 0:00:54 Time: 0:00:54
## OVERVIEW ##
path: kitti_2011_09_30_drive_0016_synced.bag
version: 2.0
duration: 29.4s
start: Sep 30 2011 11:50:39.90 (1317354639.90)
end: Sep 30 2011 11:51:09.29 (1317354669.29)
size: 725.1 MB
messages: 7329
compression: none [421/421 chunks]
types: geometry_msgs/TwistStamped [98d34b0043a2093cf9d9345ab6eef12e]
sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
sensor_msgs/NavSatFix [2d3a8cd499b9b4a0249fb98fd05cfa48]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
topics: /gps/fix 279 msgs : sensor_msgs/NavSatFix
/gps/vel 279 msgs : geometry_msgs/TwistStamped
/imu_correct 2967 msgs : sensor_msgs/Imu
/imu_raw 2967 msgs : sensor_msgs/Imu
/kitti/camera_gray_left/camera_info 279 msgs : sensor_msgs/CameraInfo
/kitti/camera_gray_left/image_raw 279 msgs : sensor_msgs/Image















 2454
2454











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









