







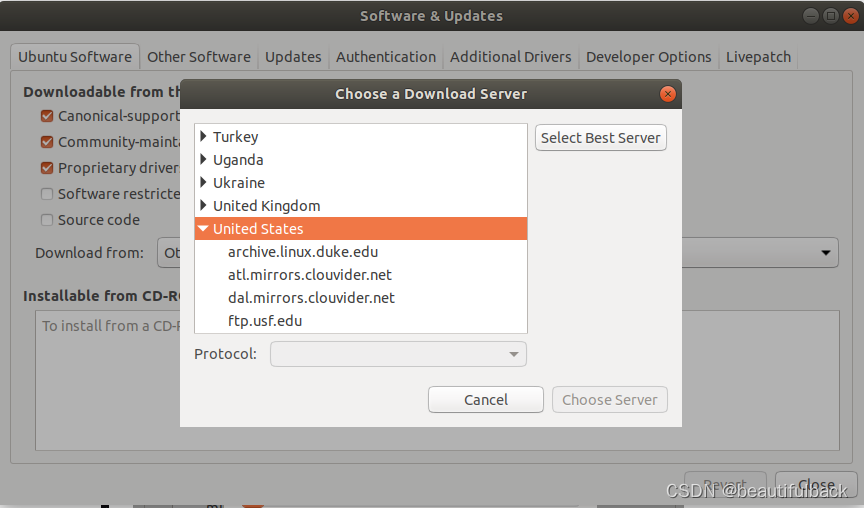
1. 软件和更新设置一下
① Download form下拉选择other
② Select Best Server (选择好后 --> 点击Choose Server)

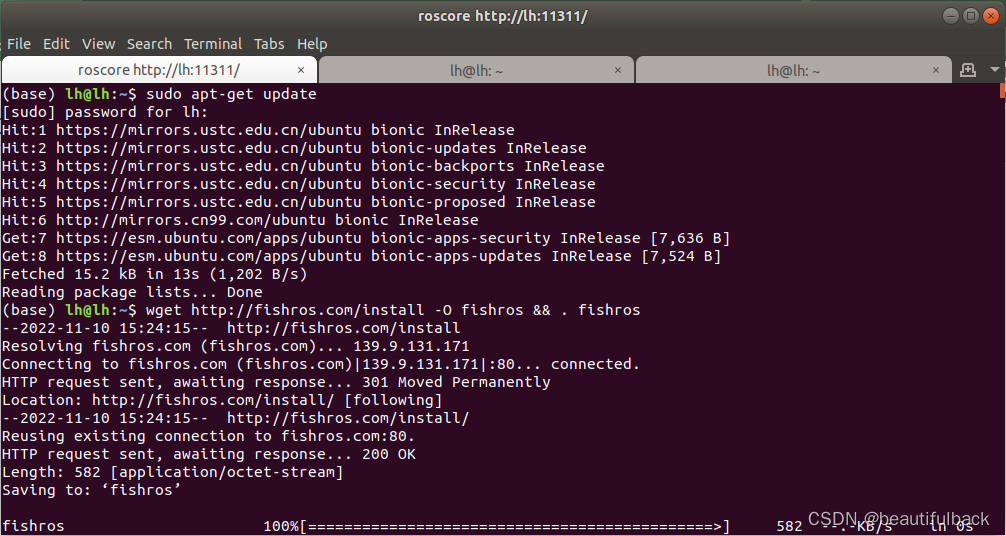
2.按照下图所示的代码分别运行
sudo apt-get update
wget http://fishros.com/install -O fishros && . fishros
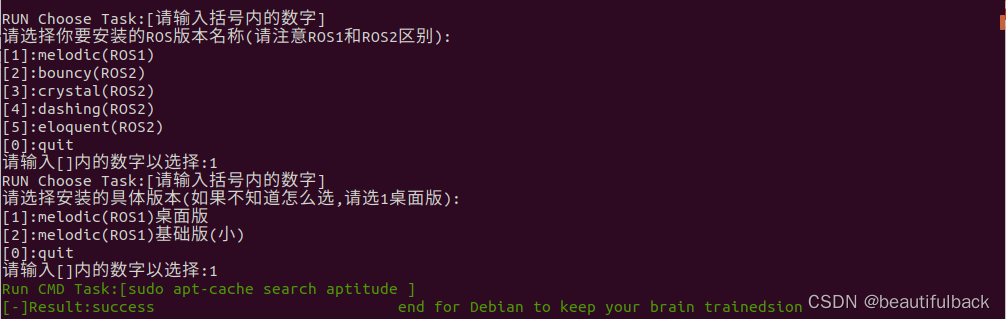
安装过程中遇到的选择请按图上所示选择即可!


3. 配置resdep,运行下面的命令后选择3,回车安装完成后,运行rosdepc update即可!
wget http://fishros.com/install -O fishros && . fishros
rosdepc update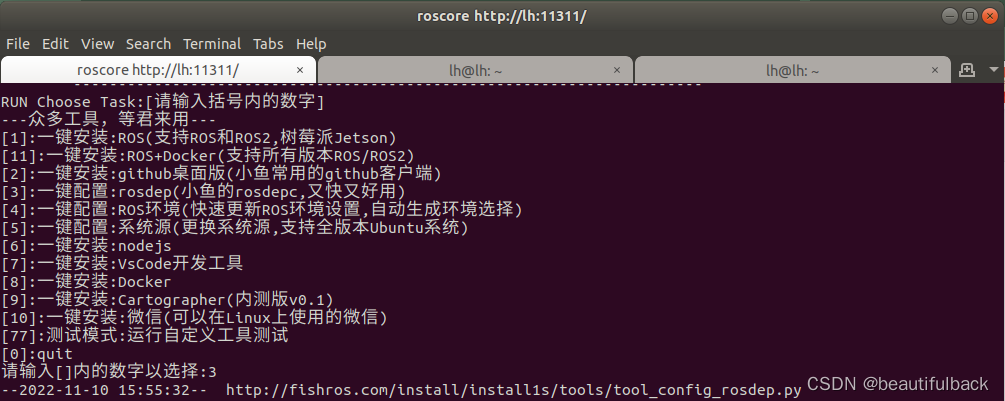

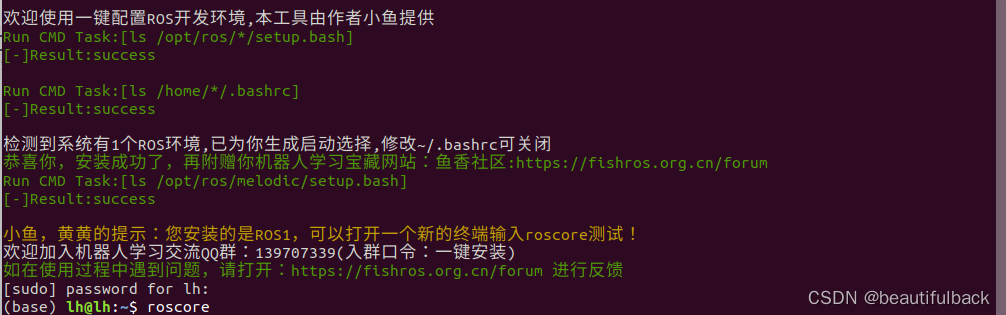
4. 测试
打开2个窗口,按下面2个命令分别运行
roscore
rosrun turtlesim turtlesim_node
# rosrun turtlesim turtle_teleop_key (可以打开第3个窗口运行这个命令)
# rosrun rviz rviz (或者第3个窗口运行这个命令)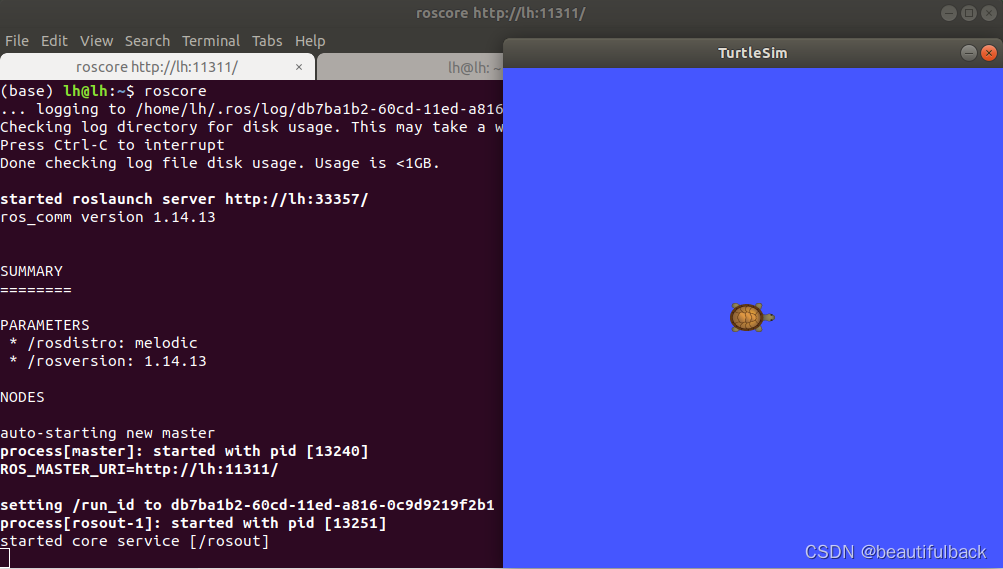















 191
191











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









