







目录
一、安装ros
1.ubuntu设置
Ubuntu系统自带的更新源服务器在国外,下载速度一般很慢,更换为国内源可以有效提高下载速度。
1)打开软件与更新

2)点击图中位置
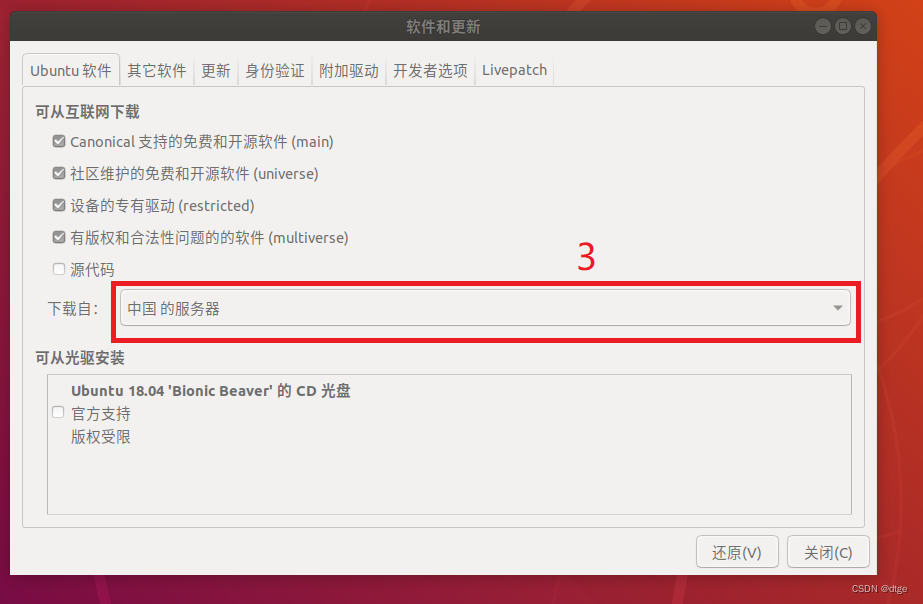
3)选择其他站点
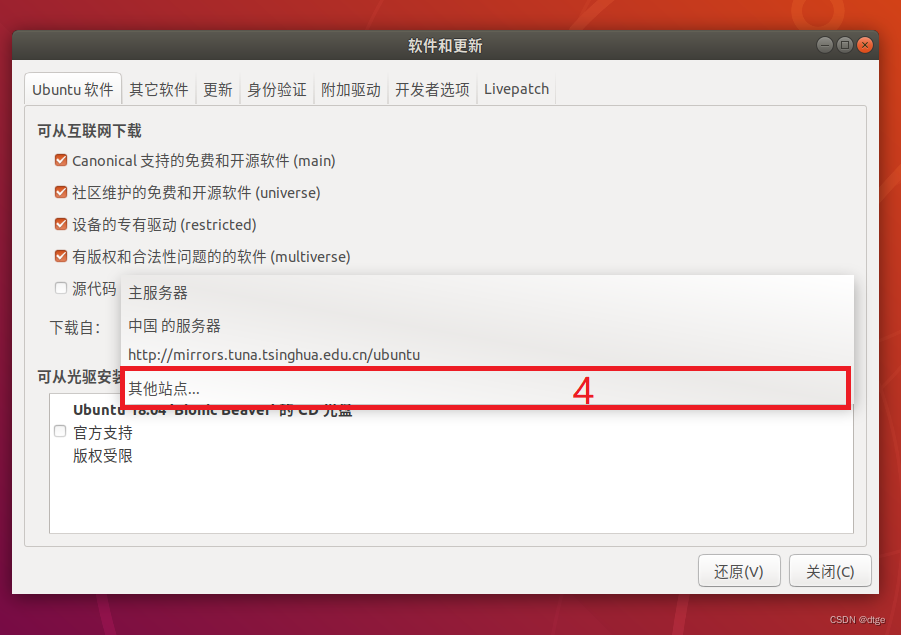
4)设置成国内源
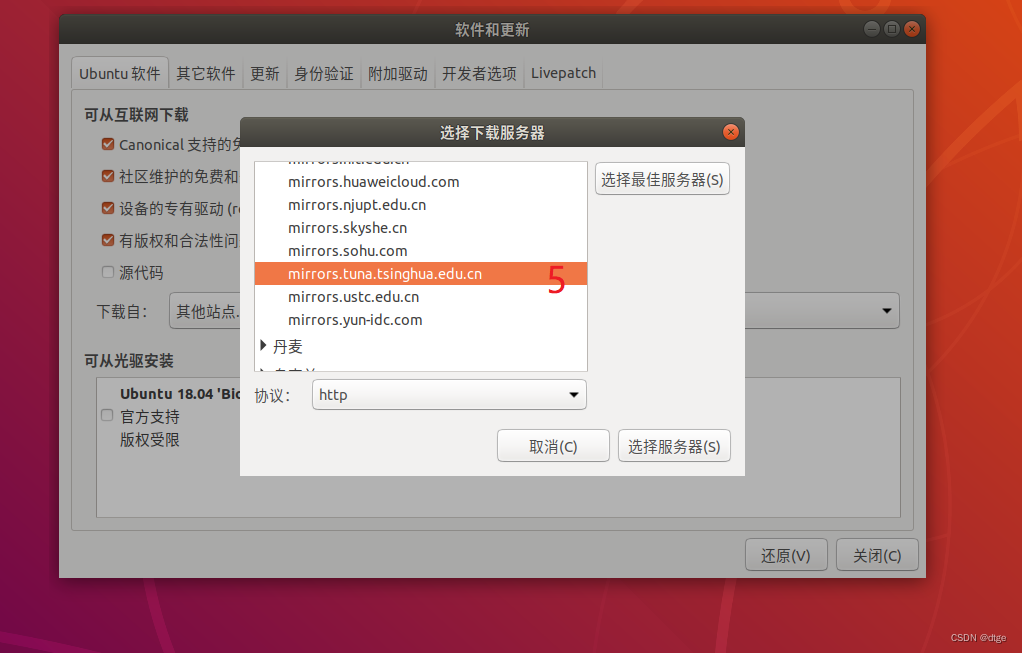
注:本文选择的是清华源
清华源地址:mirrors.tuna.tsinghua.edu.cn
中科大源地址:mirrors.ustc.edu.cn
华为源地址:mirrors.huaweicloud.com
搜狐源地址:mirrors.sohu.com
阿里云源地址:mirrors.aliyun.com
2.设置源列表
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置密钥
如果没有安装curl
sudo apt install curl 设置密钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -或者是中国的源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6544.更新软件包库
sudo apt update5.安装ros
1)桌面完全安装:(推荐):桌面中的所有内容以及2D / 3D模拟器和2D / 3D感知包
sudo apt install ros-melodic-desktop-full注:安装时间较长
2)桌面安装: ROS-Base中的所有内容以及rqt和rviz等工具
sudo apt install ros-melodic-desktop6.环境设置
source /opt/ros/melodic/setup.bash上述的环境变量设置只是在当前终端生效,每次使用都要设置一下环境,比较麻烦,采用下述方法可以在每次打开终端自动设置环境。
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc7.初始化 rosdep
在使用许多 ROS 工具之前,您需要初始化 rosdep。rosdep 使您能够轻松地为要编译的源代码安装系统依赖项,并且是在 ROS 中运行某些核心组件所必需的。
如果尚未安装 rosdep,请按如下方式进行安装。
sudo apt install python3-rosdep初始化:
sudo rosdep init
rosdep update注:这里会报错但是不影响使用 ,比较看网络情况,可以通过更换网络多试几次。
二、测试ROS
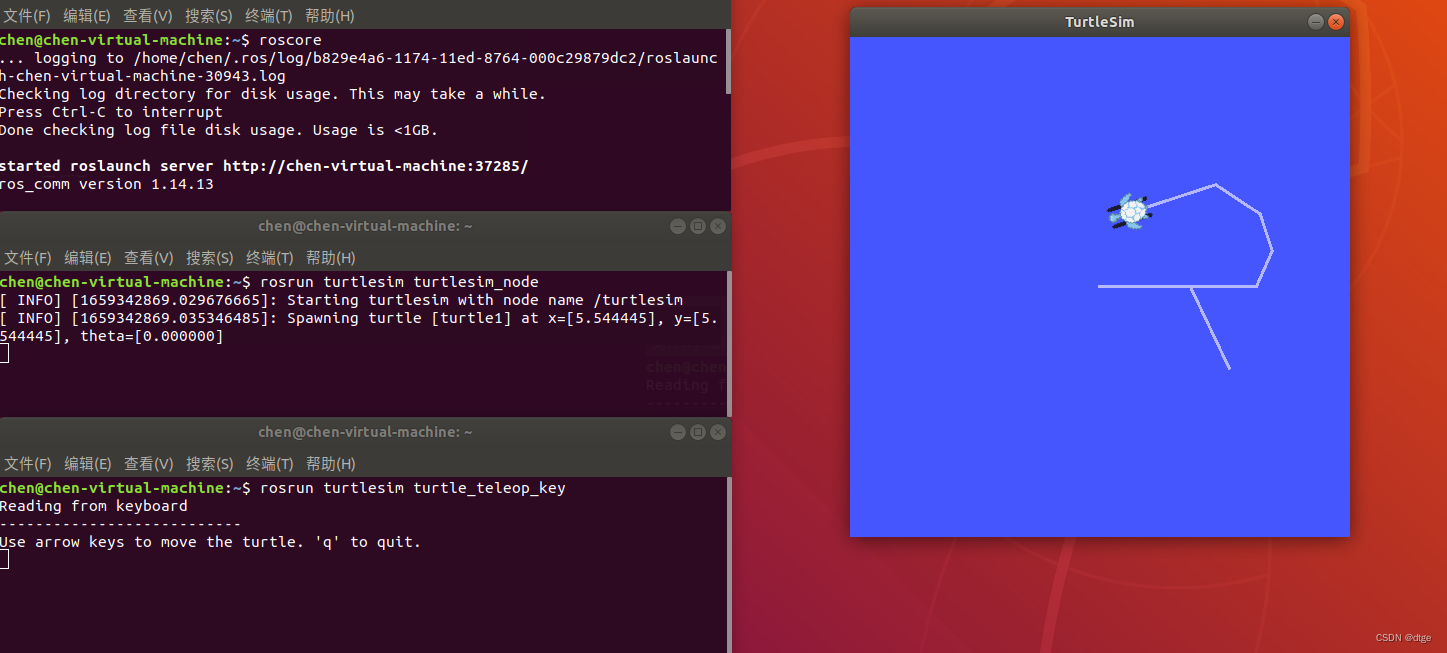
为了测试一下我们的ROS是否安装成功,这里我们来测试一个例程——小海龟仿真器。
1.打开一个新的终端(ctrl+alt+T),启动ROS Master。
roscore2.再打开一个新的终端(ctrl+alt+T),启动小海龟仿真器。
rosrun turtlesim turtlesim_node此时,运行完出现小海龟窗口。
3. 再打开一个新的终端(ctrl+alt+T),启动小海龟控制节点。
rosrun turtlesim turtle_teleop_key注:光标选中这个终端,按下方向键才能控制小海龟移动
↑和↓:前进和后退
←和→:左右旋转
















 5217
5217











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











