









根据很多博主安装ros教程,但是避免不了依然存在很多报错,本人安装ros多次踩坑,每次都会有新错误,把遇到错误及解决方式做了一个总结。
本人第一次安装ros参考:
该安装教程很详细可以参考,在该教程的基础上,解决了当时出现的很多错误。下面是详细图文教程,总结所有安装命令,无多余废话,直接按照流程命令可以一路安装到底。
1.首先点击电脑左下角选择软件和更新
如图:把源代码打勾(可能打勾之后是一个横线,不重要)。

2.更换下载源网址,选择http://mirrors.tuna.tsinghua.edu.cn/ubuntu如下图
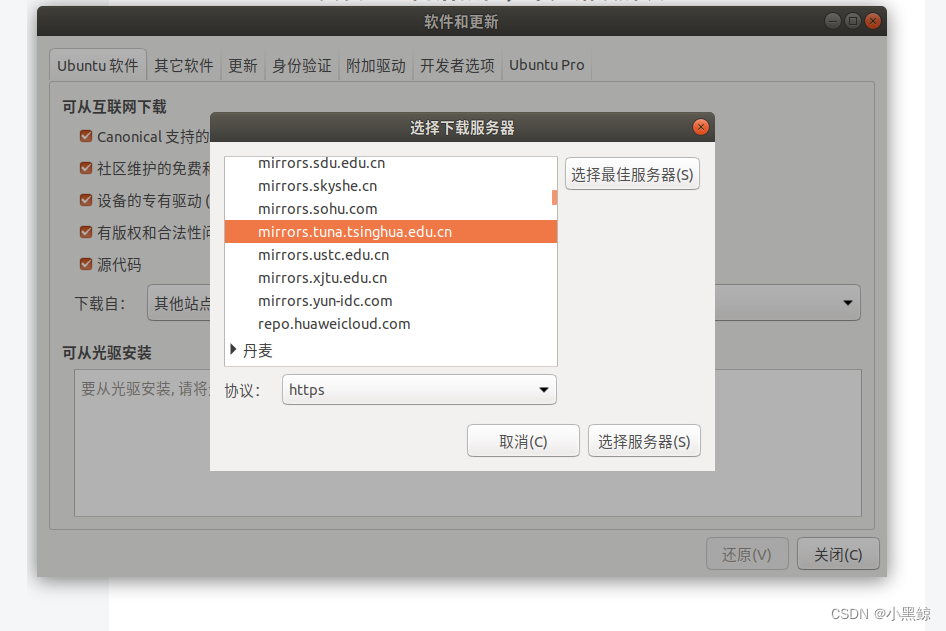
3.选择过服务器之后点击右下角关闭,会弹出来如下图界面,点击重新载入(从该网站载入资源),完成换源后窗口会消失。

4.设置安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
5.设置最新的密钥:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
6.更新Ubuntu 18.04 LTS的最新可用软件包列表
sudo apt-get update
7.安装整个ros-melodic
sudo apt-get install ros-melodic-desktop-full
8.安装ros必用的rqt可视化工具
sudo apt-get install ros-melodic-rqt*
9.避免后面出现sudo rosdep:找不到命令提示,这里需要执行如下命令
sudo apt install python-rosdep2
10.初始化rosdep(从这一步开始有错误)
sudo rosdep init
- 第一个大概率会出现的错误(无指令)
- 解决办法:上述第9步
- 第二个错误:Website may be down.
- 解决办法:打开其他位置/计算机/etc/hosts或者sudo gedit /etc/hosts文件内最后添加一行
- 添加151.101.84.133 raw.githubusercontent.com
- 保存后退出再尝试第10步
11.执行rosdep update更新(最难的一步)
rosdep update
- 只要没成功,统统执行下边
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
sudo rosdep init(每次执行rosdep update之前都要执行该命令)
rosdep update
成功界面如下图: 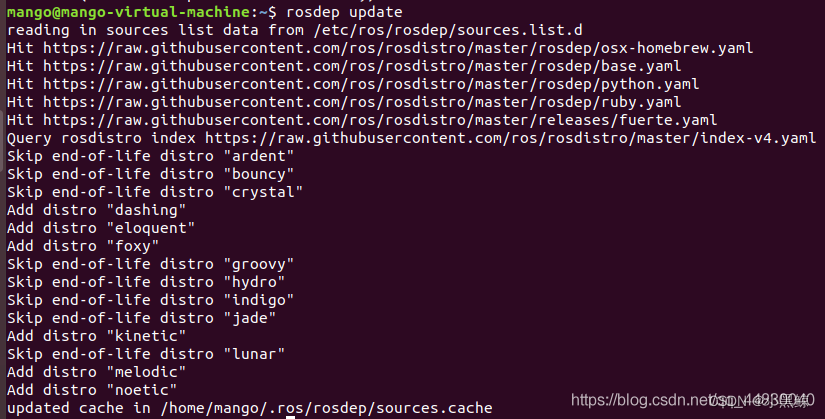
如果执行完上边5句没问题,依然没有如图成功,那就多换网,更换手机热点,github网站进去需要运气。如果换多次网之后还不成功,就需要等,不着急的话可以等到第二天再试。
12.安装rosinstall
sudo apt-get install python-rosinstall
13.再次安装ros(解决以上步骤错误可能删除了ros中的一部分,这里补充ros被删除的部分)
sudo apt-get install ros-melodic-desktop-full
14.添加ros环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
15.这里ros就全部安装完成了,开启终端运行:
roscore(打开ros)
rosrun turtlesim turtlesim_node (打开小乌龟)
rosrun turtlesim turtle_teleop_key (控制小乌龟)

16.手动完结撒花















 4214
4214











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









