






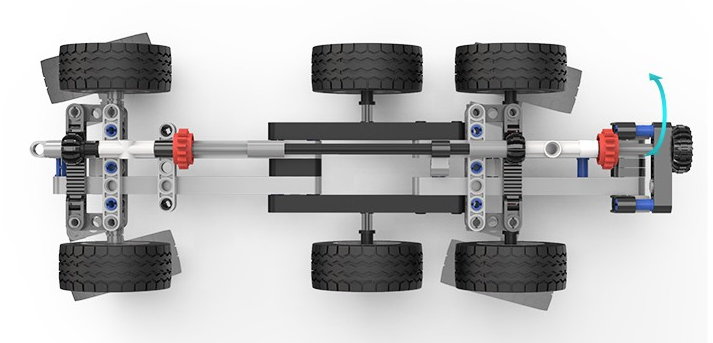
上次解答了儿子《棕色和褐色的区别及联系》、《为什么空调能制冷和滴水?》这两个问题,最近拼装了一辆工程车,涉及到了基于阿克曼原理的四轮转向装置,用我们外行的观点来看,就是前后轮转动角度是相反的,但其中很有学问,
根据前后轮不同的转动形式,可以分为几类,
1. 仅前轮转向,后轮角度不变。
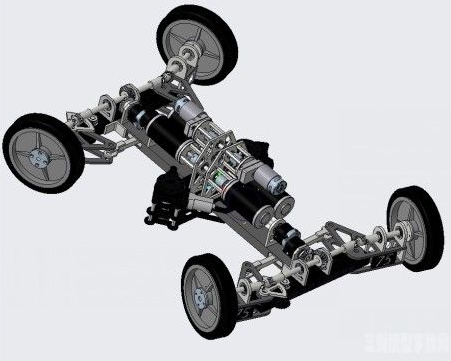
2. 前后轮均可转向。
3. (1) 前后轮角度相反,(2) 前后轮角度相同,这种模式可以实现全向运动。
阿克曼转向几何(Ackermann steering geometry)是一种为了解决交通工具转弯时,内外转向轮路径指向的圆心不同的几何学。这个想法是由德国车辆工程师“Lankensperger”于1817年提出的,之后由他的英国代理商Rudolph Ackermann于1818年提出专利。
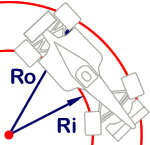
根据阿克曼转向几何设计的车辆,沿着弯道转弯时,利用四连杆的相等曲柄使内侧轮的转向角比外侧轮大大约2~4度,使四个轮子路径的圆心大致上交会于后轴的延长线上瞬时转向中心,让车辆可以顺畅的转弯,
阿克曼基本原理告诉我们,汽车在行驶过程中(直线和转弯时候),每个车轮的运动估计必须符合他的自然运动轨迹,从而保证轮胎与地面始终处于纯滚动。汽车的转向过程就是阿克曼转向,同样他是是移动机器人的一种运动模式,
通过视频来了解一下,
转向特性的特点:
1.汽车直线行驶时,4个车轮的轴线都互相平行,而且垂直于汽车纵向中心面。
2.汽车在转向行驶过程中,全部车轮都必须绕一个瞬时中心点做圆周滚动。
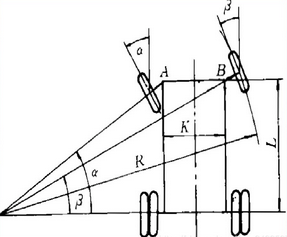
这是阿克曼核心公式,
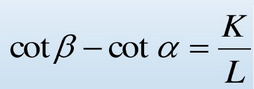
其中,
B(贝塔) - 汽车前外轮转角。
a(阿尔法) - 汽车前内轮转角。
K - 两主销中心距
L - 轴距
可以更形象地看,
如果再深入些,这是证明过程,我看不懂了,达人自取,
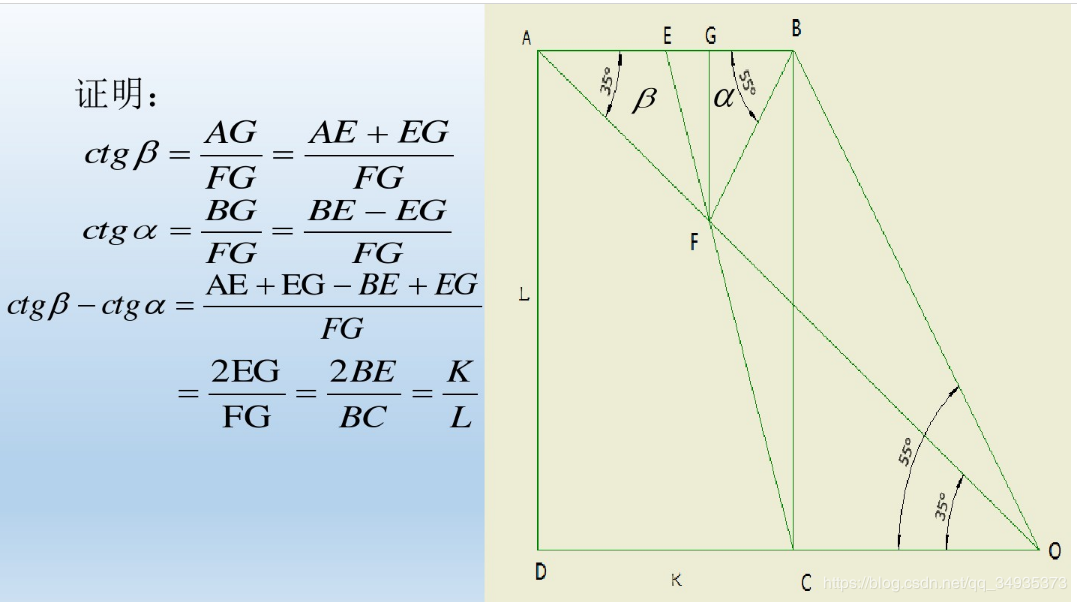
关于阿克曼原理,其实还可以有更多深入的知识,基于阿克曼转向的机构设计,以及考虑轮胎侧偏对阿克曼转向角进行调整修正,这些就让孩子未来有机会自己探索了。
近期的热文:
《一个Full GC次数过多导致系统CPU 100%的案例排查》

















 4151
4151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









