






自行车,转动前轮就能转弯,要是让前轮保持一个角度,自行车会做定圆运动,如果,车轮轴线跟着旋转,那么前轮轴线和后轮轴线的交点就是自行车做定圆运动的圆心。
自行车是两轮模型,研究轿车四轮模型,如果轿车绕后轮轴线的某一点做定圆运动的话,前轮的左右转角大小是不一样的。
(图片来源于网络)
在定圆模型中,圆心是三个车轮的轴线共同确定的,如果某一条虚拟轴线不经过圆心,那么这个车轮就会产生相对滑动。
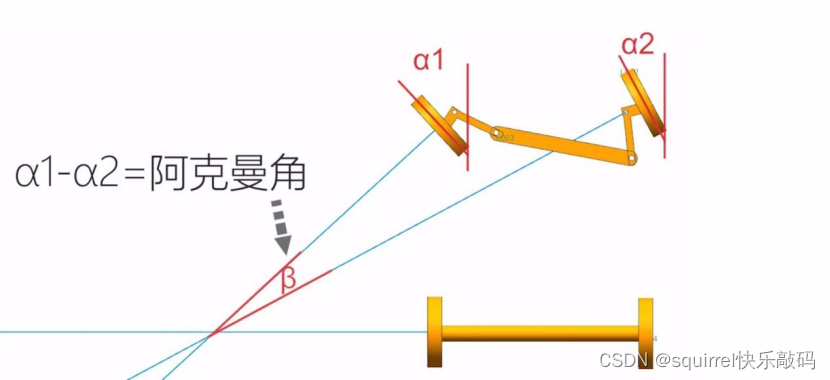
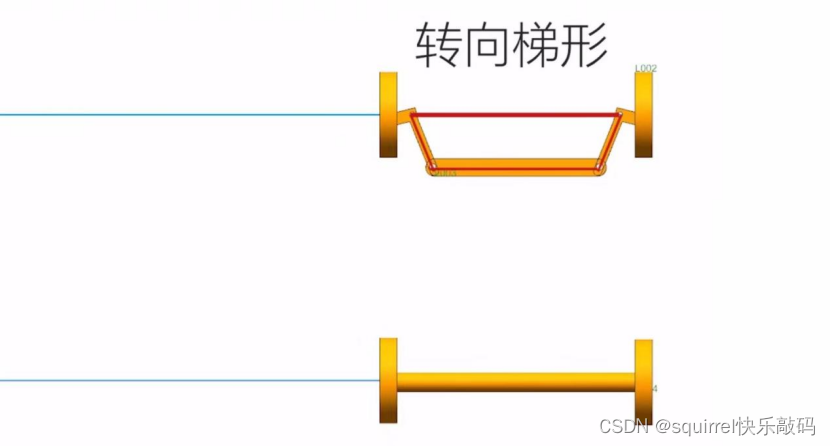
为了能让四个轮绕着某一点纯滚动的转向机构叫转向梯形,也叫阿克曼几何。
下图所示为车辆的阿克曼转向原理图,根据该原理设计的车辆在转弯时,利用四连杆的相等曲柄使车辆前轴内侧车轮的转角比外侧轮的转角大大约 2~4 度。
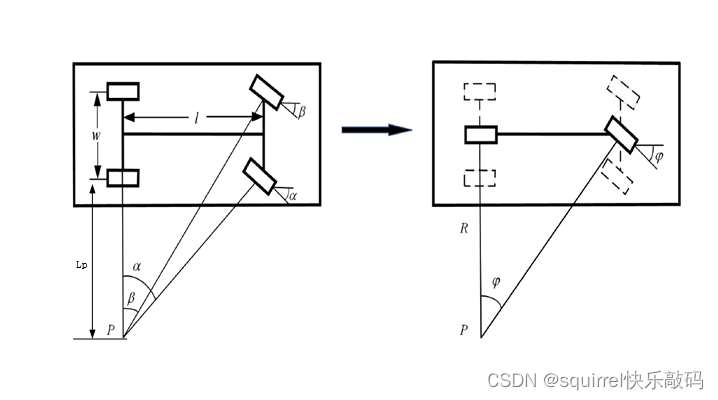
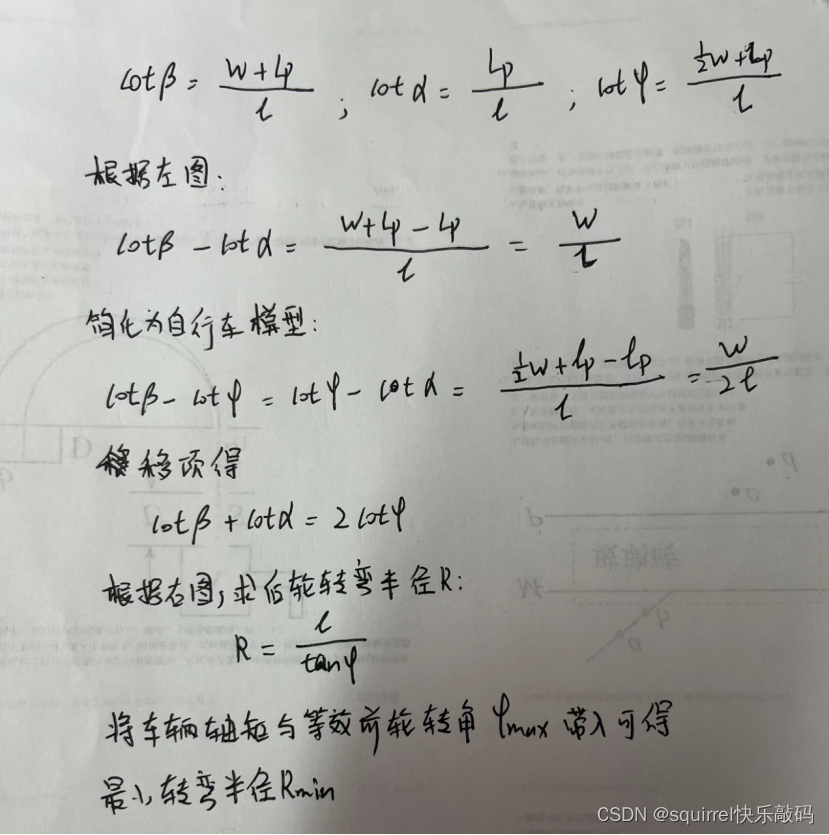
以下为推导过程:

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









