




 关节在物理模拟中扮演关键角色,定义实体间的运动学约束,决定其相对运动。Simscape Multibody使用关节块建模物理和虚拟连接,提供从零到六个自由度,涵盖平移和旋转。关节由基本元素组成,如棱镜、旋转、球形、丝杠和等速万向节,各自提供特定的运动自由度。
关节在物理模拟中扮演关键角色,定义实体间的运动学约束,决定其相对运动。Simscape Multibody使用关节块建模物理和虚拟连接,提供从零到六个自由度,涵盖平移和旋转。关节由基本元素组成,如棱镜、旋转、球形、丝杠和等速万向节,各自提供特定的运动自由度。
https://ww2.mathworks.cn/help/physmod/sm/ug/joints.html
关节在模型中的作用
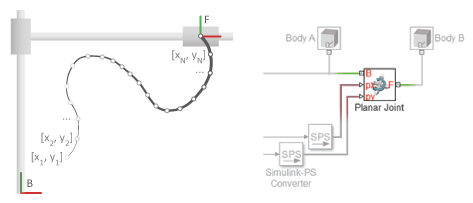
关节在物体之间施加主要的运动学约束,这些运动学约束决定了它们如何相对运动。关节可以是物理连接,例如线性液压致动器的壳体和轴之间的连接,也可以是虚拟连接,例如地球和月球之间的虚拟连接。在Simscape™Multibody™中,您可以使用关节块对两种连接类型进行建模。
实体之间的物理和虚拟连接示例

Gear和Constraint块在实体之间也施加了运动学上的约束。关节块有何不同?虽然Gear和Constraint块是根据它们在实体之间删除的DoF进行参数化的,但Joint块是根据它们提供的DoF进行参数化的,这些模块通过称为关节图元的模块进行了设置。
联合自由度
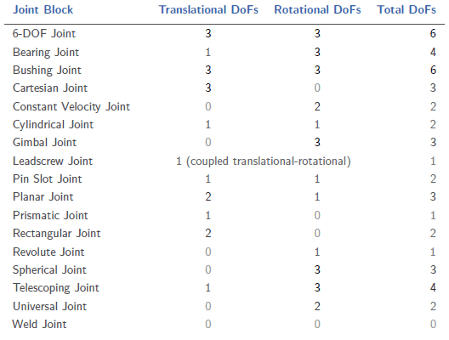
每个关节块正好连接两个物体。这样的连接确定了相邻实体可以共享的最大自由度或DoF。这些自由度的范围从焊接接头块中的零到六自由度接头和衬套接头块中的六个(三个平移和三个旋转)。平移是指位置和旋转的改变,也就是方向的改变。
联合自由度是联合机动性的量度。排除模型中的其他约束,具有更多自由度的关节可以使相邻实体之间具有更大的运动自由度。联合自由度也有数学解释。它们是在仿真过程中每个时间步完全确定关节构型所需的最小状态变量数。
考虑一个矩形接头。该关节允许在平面中平移,因此具有两个平移自由度-每个空间维度一个。在每个时间步长,关节配置完全由两个状态变量确定,即运动平面中的位置坐标[ x(t),y(t) ]。例如,这意味着您可以使用两个位置输入信号完全指定该关节的运动。
下表总结了各个关节块提供的自由度。
关节处的实际自由度通常比仅关节所允许的数目少。当模型中其他位置的运动学约束限制了相邻实体的相对运动时,就会发生这种情况。此类约束可能是由于啮合中的齿轮,由于运动学闭环中的其他关节而导致的DoF禁止以及物体之间的固定距离和角度等因素引起的。
联合基元
关节块是关节图元,各种基本而完整的关节的组合,您无法进一步分解这些关节-至少不会失去行为,例如丝杠接头的旋转-平移耦合。关节基元的数量范围从“焊接关节”模块中的零到“套管关节”模块中的六。有五个联合原语:
-
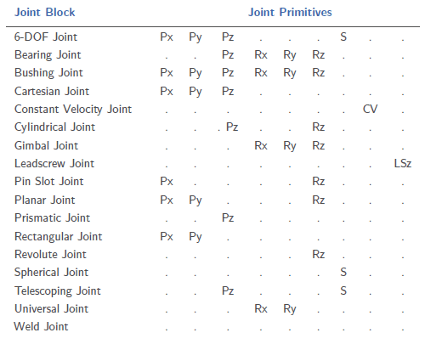
棱柱形—允许沿单个标准轴(x,y或z)平移。关节块最多可以包含三个棱柱形关节基元,每个平移自由度一个。棱镜基元标记为P *,其中星号表示运动轴,例如Px,Py或Pz。
-
旋转—允许绕单个标准轴(x,y或z)旋转。关节块最多可以包含三个旋转关节图元,每个旋转自由度一个。旋转图元标记为R *,其中星号表示运动轴,例如Rx,Ry或Rz。
-
球形-允许绕任何3-D轴[ x,y,z ] 旋转。关节块最多包含一个球形基本体,并且永远不会与旋转基本体组合。球形图元标记为S。
-
丝杠基元—允许在标准轴(例如z)上耦合旋转和平移。该原语在一端的旋转与另一端的平移之间转换。接头块最多包含一个丝杠基元。丝杠图元标记为LS *,其中星号表示运动轴。
-
等速万向节—允许在相交但任意对齐的轴之间以恒定速度旋转。关节块包含不超过一个等速基元。等速图元标记为CV。
该表总结了各种Joint块提供的关节原语和DoF。
为什么要对球形图元使用关节块?具有三个革命原语的人很容易受到万向节锁定的限制-当任意两个旋转轴对齐时,自然会但通常不希望地丢失一个旋转DoF。万向节锁定由于数值奇异而导致仿真错误。球形图元通过使用称为四元数的4-D量表示3-D旋转,消除了万向锁定错误的风险。
关节惯性
Simscape多体关节已理想化。它们与真实关节的不同之处在于它们没有惯性-在大多数模型中都是合适的近似值,在这些模型中,关节惯性对系统动力学的影响通常可以忽略不计。例如,在汽车动力传动系统的等速万向节中就是这种情况,在这种情况下,轴惯性可能会使万向节惯性相形见绌。
如果关节惯性在您的模型中很重要,则可以使用实心或惯性块进行解释。将块参考框架端口连接到适当的关节框架,并在块对话框中指定关节惯性属性。您可以指定关节质量或密度,惯性乘积,惯性矩和质心。有关如何指定惯性的更多信息,请参见表示固体惯量。

















 9314
9314

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









