









符号定义
带噪声的激光观测点:
预测的地图坐标点:
真实的激光观测点:
真实的地图坐标点:
预测的pose:
真值的pose:
误差pose:
激光的观测噪声: ~ N(0,
)
激光雷达观测的是什么:
激光雷达可以获取一系列3D坐标点,代表着周围物体的表面点距离激光中心的距离和方位。
如果这帧是第一帧,那么就认为这一系列的雷达点,构成了地图的最开始的数据。
如果是接下来的帧,那么就要考虑,如何通过这个帧的一系列激光点,与之前构建的地图点能匹配上,从而计算出当前激光的pose。
有两种方式,一种是点对点,另一种是点到面(或线段)。
点到点的观测
对于点到点来说,就是把激光测量的点,用预测的pose,转换到地图坐标系得到点
,找到最近的地图点
。如果pose是准确的,那么应当两者要重合,及
。
那么观测就是,观测到了地图点,预测就是
。即观测量是坐标点。
注意,这个观测到的地图点,实际上是利用了激光的相对坐标,以及预估的pose:
,得到了预测的点
后,通过最近距离搜索得到的,不是直接获取的。
不像图像,点都是更加稠密的,可以通过特征点方式,来进行独立的匹配。激光不行,不能保证某束激光一定是打到之前的某个地方点,且也没有什么所谓的特征可以用来匹配,这也是这种传感器的特点带来的对于匹配的改变。
这也就会带来一些问题,比如预估的pose比较差,那所谓的观测到的地图点,就不会准确,执行下面的优化,就会越来越差。比如说弱势场景下如直面一堵墙,范围内都是墙,就不能稳定的进行优化。
观测方程
其形式是:
又可以分为以下几种情况:
1、真实的位姿,真实的观测:
这个就等于是找到的地图点。
这个我们也不知道它是啥,只知道它与
的关系:
2、真实的位姿,带噪声的观测:
这个实际上就是qi附近,呈现v的分布,不知道具体值是多少。
3、预测的位姿,带噪声的观测:
可以计算出来值的。
根据以上的关系,我们可以知道:
因为v是0均值的正太分布,正负号无所谓。
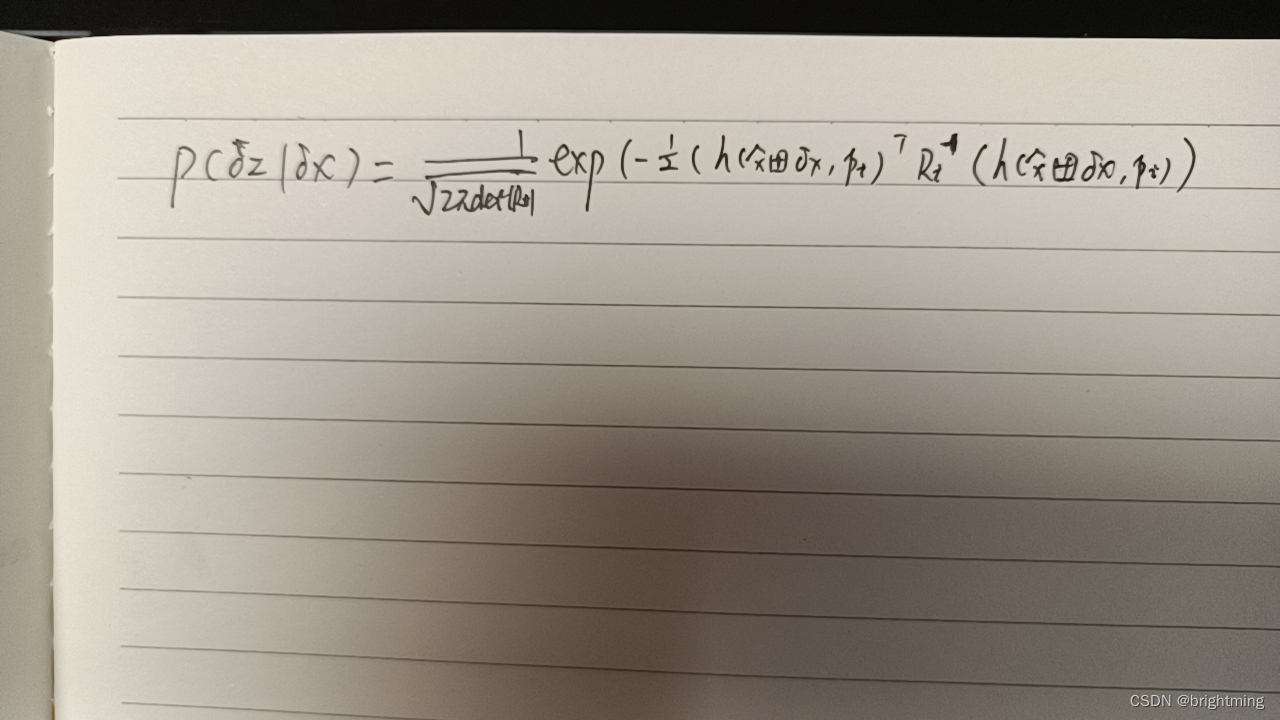
表示,就算用真值的pose,计算的地图点,与真实的地图点,之间还是有误差,这个是来源于激光的测量误差。
这个v在后面求偏导中好像没有有什么作用,实际上,反馈了一个在当前误差状态的情况下,观测量的概率分布,就是
偏导求取
滤波的做法:
如果是按照滤波的思路来往下走的话,就是要求出观测方程对于误差状态的偏导,即:
这个H有两种求解思路:
1、一种是直接泰勒近似:
那么
这个与优化的求解过程是一样的。
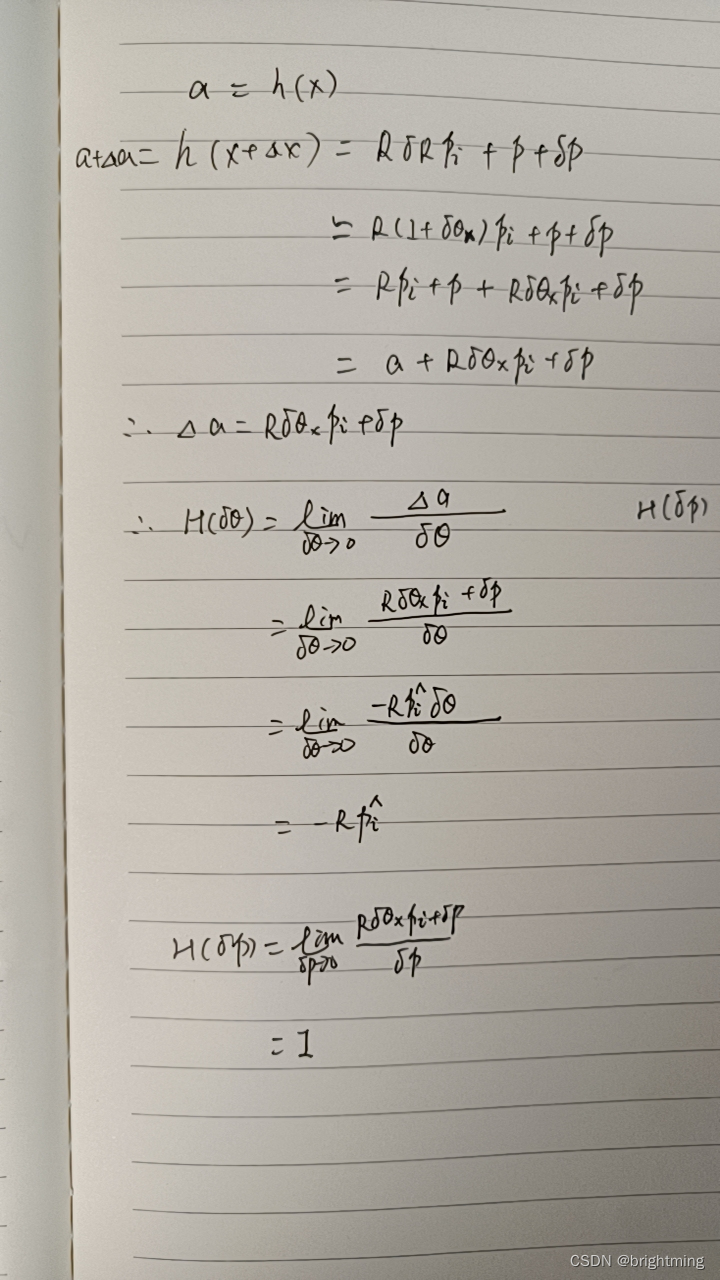
2、另一种是加扰动:
假设:
那么:
就看:与
的关系:
需要具体参数化来运算:
优化的做法:
如果是按照优化的思路,是要让残差越来越小,因此要找出残差与误差状态的因果关系,求出残差对于误差状态的偏导:
以上两者,怎么统一理解呢?
实际上,泰勒近似的做法,就是认为,以当前预估的pose,计算出来的预测地图点,之所以与真实的地图坐标点有误差,是因为,pose不准,把这个误差的pose与考虑上,假设它与结果有个变换关系(这个正是我们要求的H),那就能近似得到了。
而残差,本质上就是真实的地图点与预测的地图点的距离,相当于是把泰勒近似的做法,反过来想了一下,即:
变成:
有个误差,这个误差是误差状态量引起的,假设用符合表示这个误差,那就是因果转换矩阵*误差状态量。 这个因果转换矩阵就是偏导。
所以,泰勒近似,与优化的残差与误差量的偏导,是一个事情的两种说法。
加扰动是怎么理解呢?
这个其实是更容易理解的,就是假设pose变动了多少,带来的结果会变化多少。本质上是一回事。
具体做法是列出之前是什么,然后,左边加上一个结果的变化量,右边在变量中增加变量的变化量,最终得到结果的变化量与变量的变化量的关系,然后用极限的方式求出偏导。















 5036
5036











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









