









基本原理
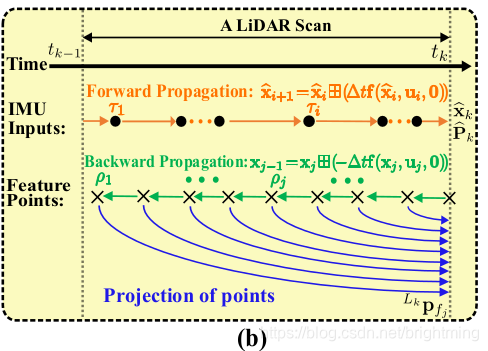
在上面的sync_packages代码中,已经拿到了符合要求的imu数据和lidar数据,现在,就基于这些数据对lidar点进行补偿,目的是补偿到结束时刻的lidar坐标系下。
坐标系介绍
总共有3个坐标系:
全局坐标系(world)、imu坐标系(body)、lidar坐标系
全局坐标系一般以开机点为原点;
imu坐标系时刻在变化,是一个纯粹以imu来推理的坐标系;
lidar坐标系:如果lidar与imu是刚性连接的,那么lidar坐标系与imu坐标系的转换关系就是固定的,知道了imu坐标系就可以知道lidar坐标系。
基本处理流程
1、imu预积分
把堆积的imu数据进行预积分处理,推导出每一个imu数据时刻相对与全局坐标系的T,以及对应的方差。
有个细节要注意:
每次开始之前,都会把上一次预积分的最后一个imu加入到本次imu队列的头部,以及对应的姿态结果作为此次预积分的开始姿态。
可以想象,这种推理会导致imu推理的轨迹飞的很快,但是不影响我们总的结果,因为我们取的是短时间内的相对运动姿态。
另外,对于此次处理的点云数据,也按照相对时间顺序进行了升序排列。
这里的
这里预积分用的是中值积分:
数据准备:
/*** add the imu of the last frame-tail to the of current frame-head ***/
auto v_imu = meas.imu;
v_imu.push_front(last_imu_);//让imu的时间能包住lidar的时间
const double &imu_beg_time = v_imu.front()->header.stamp.toSec();
const double &imu_end_time = v_imu.back()->header.stamp.toSec();
const double &pcl_beg_time = meas.lidar_beg_time;
/*** sort point clouds by offset time ***/
pcl_out = *(meas.lidar);
std::sort(pcl_out.points.begin(), pcl_out.points.end(), time_list);
const double &pcl_end_time = pcl_beg_time + pcl_out.points.back().curvature / double(1000);
std::cout<<"[ IMU Process ]: Process lidar from "<<pcl_beg_time<<" to "<<pcl_end_time<<", " \
<<meas.imu.size()<<" imu msgs from "<<imu_beg_time<<" to "<<imu_end_time<<std::endl;
/*** Initialize IMU pose ***/
IMUpose.clear();
// IMUpose.push_back(set_pose6d(0.0, Zero3d, Zero3d, state.vel_end, state.pos_end, state.rot_end));
IMUpose.push_back(set_pose6d(0.0, acc_s_last, angvel_last, state_inout.vel_end, state_inout.pos_end, state_inout.rot_end));
这是点云的排序函数:
const bool time_list(PointType &x, PointType &y) {return (x.curvature < y.curvature);};
预积分过程
典型的:
/*** forward propagation at each imu point ***/
Eigen::Vector3d acc_imu, angvel_avr, acc_avr, vel_imu(state_inout.vel_end), pos_imu(state_inout.pos_end);
Eigen::Matrix3d R_imu(state_inout.rot_end);
Eigen::MatrixXd F_x(Eigen::Matrix<double, DIM_OF_STATES, DIM_OF_STATES>::Identity());
Eigen::MatrixXd cov_w(Eigen::Matrix<double, DIM_OF_STATES, DIM_OF_STATES>::Zero());
double dt = 0;
for (auto it_imu = v_imu.begin(); it_imu != (v_imu.end() - 1); it_imu++)
{//中值积分
auto &&head = *(it_imu);
auto &&tail = *(it_imu + 1);
angvel_avr<<0.5 * (head->angular_velocity.x + tail->angular_velocity.x),
0.5 * (head->angular_velocity.y + tail->angular_velocity.y),
0.5 * (head->angular_velocity.z + tail->angular_velocity.z);
acc_avr <<0.5 * (head->linear_acceleration.x + tail->linear_acceleration.x),
0.5 * (head->linear_acceleration.y + tail->linear_acceleration.y),
0.5 * (head->linear_acceleration.z + tail->linear_acceleration.z);
angvel_avr -= state_inout.bias_g;
acc_avr = acc_avr * G_m_s2 / scale_gravity - state_inout.bias_a;
#ifdef DEBUG_PRINT
// fout<<head->header.stamp.toSec()<<" "<<angvel_avr.transpose()<<" "<<acc_avr.transpose()<<std::endl;
#endif
dt = tail->header.stamp.toSec() - head->header.stamp.toSec();
/* covariance propagation */
Eigen::Matrix3d acc_avr_skew;
Eigen::Matrix3d Exp_f = Exp(angvel_avr, dt);
acc_avr_skew<<SKEW_SYM_MATRX(angvel_avr);
F_x.block<3,3>(0,0) = Exp(angvel_avr, - dt);
F_x.block<3,3>(0,9) = - Eye3d * dt;
// F_x.block<3,3>(3,0) = R_imu * off_vel_skew * dt;
F_x.block<3,3>(3,6) = Eye3d * dt;
F_x.block<3,3>(6,0) = - R_imu * acc_avr_skew * dt;
F_x.block<3,3>(6,12) = - R_imu * dt;
F_x.block<3,3>(6,15) = Eye3d * dt;
Eigen::Matrix3d cov_acc_diag(Eye3d), cov_gyr_diag(Eye3d);
cov_acc_diag.diagonal() = cov_acc;
cov_gyr_diag.diagonal() = cov_gyr;
cov_w.block<3,3>(0,0).diagonal() = cov_gyr * dt * dt * 10000;
cov_w.block<3,3>(3,3) = R_imu * cov_gyr_diag * R_imu.transpose() * dt * dt * 10000;
cov_w.block<3,3>(6,6) = R_imu * cov_acc_diag * R_imu.transpose() * dt * dt * 10000;
cov_w.block<3,3>(9,9).diagonal() = Eigen::Vector3d(0.0001, 0.0001, 0.0001) * dt * dt; // bias gyro covariance
cov_w.block<3,3>(12,12).diagonal() = Eigen::Vector3d(0.0001, 0.0001, 0.0001) * dt * dt; // bias acc covariance
state_inout.cov = F_x * state_inout.cov * F_x.transpose() + cov_w;
/* propogation of IMU attitude */
R_imu = R_imu * Exp_f;
/* Specific acceleration (global frame) of IMU */
acc_imu = R_imu * acc_avr + state_inout.gravity;
/* propogation of IMU */
pos_imu = pos_imu + vel_imu * dt + 0.5 * acc_imu * dt * dt;
/* velocity of IMU */
vel_imu = vel_imu + acc_imu * dt;
/* save the poses at each IMU measurements */
angvel_last = angvel_avr;
acc_s_last = acc_imu;
double &&offs_t = tail->header.stamp.toSec() - pcl_beg_time;
// std::cout<<"acc "<<acc_imu.transpose()<<"vel "<<acc_imu.transpose()<<"vel "<<pos_imu.transpose()<<std::endl;
IMUpose.push_back(set_pose6d(offs_t, acc_imu, angvel_avr, vel_imu, pos_imu, R_imu));
}
最后把每个imu的姿态保存到了pose队列中。
(这里的协方差没用到,怎么用?)
最后还有一个细节:
pcl的最后一个点的时间和imu的最后一个时间往往不是精准对齐的,这里根据最后一个imu的姿态,计算了最后一个点云的姿态,这个是我们其他所有其他时刻的点云要对准的坐标系:
/*** calculated the pos and attitude prediction at the frame-end ***/
dt = pcl_end_time - imu_end_time;
state_inout.vel_end = vel_imu + acc_imu * dt;
state_inout.rot_end = R_imu * Exp(angvel_avr, dt);
state_inout.pos_end = pos_imu + vel_imu * dt + 0.5 * acc_imu * dt * dt;
2、点云补偿
基本过程是把点云的pose,倒序处理,每两个为一对,在队列前面叫做head,下一个叫做tail,对于点云数据,也是倒序处理,找大于head时间戳的点来处理,点云处理的位置用一个变量来维护。
这个过程的详细描述为:
首先将pcl的指针it_pcl指向最后一个点云的位置;
取出imu pose中最后面的两个pose,时间小的叫做head,时间大的叫做tail;
以it_pcl为起点,倒序处理每个点,对于某个点,假设对应的时刻为i,判断i是否大于head的时间,如果大于,则以这个head对应的姿态为起点、pcl点与head的时间差为dt,计算head到i时刻的姿态。然后对比最后一个点云(结束时刻)的姿态,计算出i时刻的这个点,在结束时刻的lidar坐标系下的坐标。
P_at_lidar_i=Pi; //i时刻lidar坐标系下的点
P_at_imu_i=TblP_at_lidar_i;//i时刻lidar点在imu坐标系的坐标
P_at_world_i=TwiP_at_imu_i;//转换到world坐标系
P_at_imu_e=Twe.inverse()*P_at_world_i;//转换到结束帧时刻的imu坐标
P_at_lidar_e=Tbl.inverse()*P_at_imu_e;//有imu再转到lidar坐标
由于作者用的imu与lidar,坐标系的朝向是一样的,只有平移量,所以不是像上面这样写。
但如果要改造为自己的装置,则要这样来处理。
在代码中也对比了这种写法与作者的补偿后的点的坐标,是一致的。
auto pos_liD_e = state_inout.pos_end + state_inout.rot_end * Lidar_offset_to_IMU;
// auto R_liD_e = state_inout.rot_end * Lidar_R_to_IMU;
//pos_liD_e的计算假设是imu与lidar的坐标系之间没有旋转变换,只有平移量,这个是livox集成了bmi088
//它们的坐标系都是前左上,只有平移
//如果是用自己的装配,需要根据条件调整
//本质上就是Pw=Tib*Tbl*Pl
//Pl是雷达坐标系的原点,在雷达坐标系就是(0,0,0)
//Tib表示imu body坐标系到全局坐标系的转换,这里就是计算出来的rot_end,pos_end
//Tbl表示lidar坐标系到imu body坐标系的转换,这里旋转为单位阵,平移就是Lidar_offset_to_IMU,即lidar原点在imu坐标系下的表示
#ifdef DEBUG_PRINT
std::cout<<"[ IMU Process ]: vel "<<state_inout.vel_end.transpose()<<" pos "<<state_inout.pos_end.transpose()<<" ba"<<state_inout.bias_a.transpose()<<" bg "<<state_inout.bias_g.transpose()<<std::endl;
std::cout<<"propagated cov: "<<state_inout.cov.diagonal().transpose()<<std::endl;
#endif
/*** undistort each lidar point (backward propagation) ***/
auto it_pcl = pcl_out.points.end() - 1;
for (auto it_kp = IMUpose.end() - 1; it_kp != IMUpose.begin(); it_kp--)
{
bool comp=false;
if(it_kp==IMUpose.begin()+1){
comp=true;
}
auto head = it_kp - 1;
auto tail = it_kp;
R_imu<<MAT_FROM_ARRAY(head->rot);
acc_imu<<VEC_FROM_ARRAY(head->acc);
// std::cout<<"head imu acc: "<<acc_imu.transpose()<<std::endl;
vel_imu<<VEC_FROM_ARRAY(head->vel);
pos_imu<<VEC_FROM_ARRAY(head->pos);
angvel_avr<<VEC_FROM_ARRAY(head->gyr);
int pc_cnt=0;
for(; it_pcl->curvature / double(1000) > head->offset_time; it_pcl --)
{
++pc_cnt;
dt = it_pcl->curvature / double(1000) - head->offset_time;
/* Transform to the 'end' frame, using only the rotation
* Note: Compensation direction is INVERSE of Frame's moving direction
* So if we want to compensate a point at timestamp-i to the frame-e
* P_compensate = R_imu_e ^ T * (R_i * P_i + T_ei) where T_ei is represented in global frame */
Eigen::Matrix3d R_i(R_imu * Exp(angvel_avr, dt));
Eigen::Vector3d T_ei(pos_imu + vel_imu * dt + 0.5 * acc_imu * dt * dt + R_i * Lidar_offset_to_IMU - pos_liD_e);
//T_ei表示i时刻的lidar坐标原点到end时刻的坐标平移量,用的全局坐标系的衡量
//T_ei=Ti-Te
//为什么是Ti-Te,在global坐标系下原点为o,Ti是向量oi,Te是向量oe,
//Ti-Te就是向量oi-oe,得到的是向量ei,
//即以e指向i的向量,以e为原点的向量
//end时刻已经计算出来了就是pos_liD_e
//i时刻的坐标计算方式与pos_liD_e一样
//pos_liD_i=Pos_i+rot_i*Lidar_offset_to_IMU
//而Pos_i=Pos_head+velocity_head*dt+0.5*acc_head*dt*dt
Eigen::Vector3d P_i(it_pcl->x, it_pcl->y, it_pcl->z);
Eigen::Vector3d P_compensate = state_inout.rot_end.transpose() * (R_i * P_i + T_ei);
//本质上是将P_i转换到全局坐标系,再转换到end的坐标系下
//验证以下:
static long test_cnt=0;
if(comp==true && pc_cnt%100){
++test_cnt;
//lidar 到imu的转换矩阵
Eigen::Matrix4d Tbl;
Tbl<<1,0,0,Lidar_offset_to_IMU(0),
0,1,0,Lidar_offset_to_IMU(1),
0,0,1,Lidar_offset_to_IMU(2),
0,0,0,1;
std::cout<<"Tbl=\n"<<Tbl<<std::endl;
//i时刻imu到global的转换
Eigen::Matrix4d Twi;
Twi.block<3,3>(0,0)=R_i;
Twi.block<3,1>(0,3)=pos_imu + vel_imu * dt + 0.5 * acc_imu * dt * dt;
Twi(3,0)=0;
Twi(3,1)=0;
Twi(3,2)=0;
Twi(3,3)=1;
std::cout<<"Twi=\n"<<Twi<<std::endl;
//e时刻imu到global的转换
Eigen::Matrix4d Twe;
Twe.block<3,3>(0,0)=(state_inout.rot_end);
Twe.block<3,1>(0,3)=(state_inout.pos_end);
Twe(3,0)=0;
Twe(3,1)=0;
Twe(3,2)=0;
Twe(3,3)=1;
std::cout<<"Twe=\n"<<Twe<<std::endl;
//i时刻 lidar原点在global下的值
Eigen::Vector4d P_i_lidar_at_imu;
P_i_lidar_at_imu.block<3,1>(0,0)=Lidar_offset_to_IMU;
P_i_lidar_at_imu(3,0)=1;
Eigen::Vector4d P_i_lidar_at_global=Twi*P_i_lidar_at_imu;
std::cout<<"P_i_lidar_at_global=\n"<<P_i_lidar_at_global<<std::endl;
//e时刻 lidar原点在global下的值
Eigen::Vector4d P_e_lidar_at_imu;
P_e_lidar_at_imu.block<3,1>(0,0)=Lidar_offset_to_IMU;
P_e_lidar_at_imu(3,0)=1;
Eigen::Vector4d P_e_lidar_at_global=Twe*P_e_lidar_at_imu;
std::cout<<"P_e_lidar_at_global=\n"<<P_e_lidar_at_global<<std::endl;
//e->i
Eigen::Vector4d Tei_2=P_i_lidar_at_global-P_e_lidar_at_global;
std::cout<<"Tei_2=\n"<<Tei_2
<<"\nT_ei=\n"<<T_ei<<std::endl;
//i时刻的lidar点转到i时刻的imu坐标系,再转到global坐标系,再转到e时刻的imu坐标系,再转到e时刻的lidar坐标系
Eigen::Vector4d P_i_h;
P_i_h.block<3,1>(0,0)=P_i;
P_i_h(3)=1;
Eigen::Vector4d Pw_i=Twi*Tbl*P_i_h;//lidar坐标系下的点,转到imu坐标系,转到global坐标系
Eigen::Vector4d Pe=Tbl.inverse()*Twe.inverse()*Pw_i;//global坐标系的点,转到e时刻imu坐标系,转到lidar坐标系
std::cout<<"Point at e =\n"<<Pe<<std::endl;
std::cout<<"P_compensate = \n"<<P_compensate<<std::endl;
std::cout<<"P_compensate-pe="<<(P_compensate-Pe.block<3,1>(0,0))<<std::endl;
std::cout<<"pos_liD_e=\n"<<pos_liD_e<<std::endl;
}
/// save Undistorted points and their rotation
it_pcl->x = P_compensate(0);
it_pcl->y = P_compensate(1);
it_pcl->z = P_compensate(2);
if (it_pcl == pcl_out.points.begin()) break;
}
对比的结果:
Tbl=
1 0 0 0.04165
0 1 0 0.02326
0 0 1 -0.0284
0 0 0 1
Twi=
1 -0.000388064 0.000560378 -0.0502916
0.000388001 1 0.000113026 -0.0282829
-0.000560422 -0.000112809 1 0.0225139
0 0 0 1
Twe=
1 -0.000500308 0.000576076 -0.0501736
0.000500295 1 2.28191e-05 -0.0279155
-0.000576087 -2.25309e-05 1 0.0224003
0 0 0 1
P_i_lidar_at_global=
-0.00866659
-0.00500993
-0.0059121
1
P_e_lidar_at_global=
-0.00855164
-0.00463531
-0.00602425
1
Tei_2=
-0.00011495
-0.000374617
0.00011215
0
T_ei=
-0.00011495
-0.000374617
0.00011215
Point at e =
14.6811
-6.30971
3.42791
1
P_compensate =
14.6811
-6.30971
3.42791
P_compensate-pe=-5.68434e-14
1.15463e-14
-2.17604e-14
pos_liD_e=
-0.00855164
-0.00463531
-0.00602425

















 1040
1040

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









