







 本文分析了地平线公司在Waymo Open Dataset Challenges 2020中获得2D/3D检测和跟踪赛道冠军的解决方案,包括HorizonDet(2D检测)、AFDet(3D检测)和HorizonMOT(2D/3D跟踪)。地平线团队采用了模型ensemble、训练策略优化和数据增强等技术,如Cascade R-CNN与CenterNet的结合,以及TTF训练策略。此外,他们还利用了PointPillars和复杂的3D特征提取器来增强点云编码。
本文分析了地平线公司在Waymo Open Dataset Challenges 2020中获得2D/3D检测和跟踪赛道冠军的解决方案,包括HorizonDet(2D检测)、AFDet(3D检测)和HorizonMOT(2D/3D跟踪)。地平线团队采用了模型ensemble、训练策略优化和数据增强等技术,如Cascade R-CNN与CenterNet的结合,以及TTF训练策略。此外,他们还利用了PointPillars和复杂的3D特征提取器来增强点云编码。

©PaperWeekly 原创 · 作者|黄飘
学校|华中科技大学硕士
研究方向|多目标跟踪
随着最近 Waymo Open Dataset Challenges 2020 的落幕,其中关于 2D/3D 目标检测和跟踪赛道的部分冠亚军解决方案也都公布了,由于我只看到了地平线发布的论文,所以就只分析他们公司在这次比赛中的解决方案。
PS:地平线在 Waymo 2020 中获得了 3D 检测、2D/3D 跟踪和域自适应性赛道冠军,2D 检测赛道亚军。

HorizonDet

论文标题:2nd Place Solution for Waymo Open Dataset Challenge - 2D Object Detection
论文链接:https://arxiv.org/abs/2006.15507
一般检测竞赛的算法技术报告中,榜前的方法都是各种算法 ensemble 的,比如多种检测算法结合,又比如多种 nms 方式的结合等。
 1.1 模型选择
1.1 模型选择
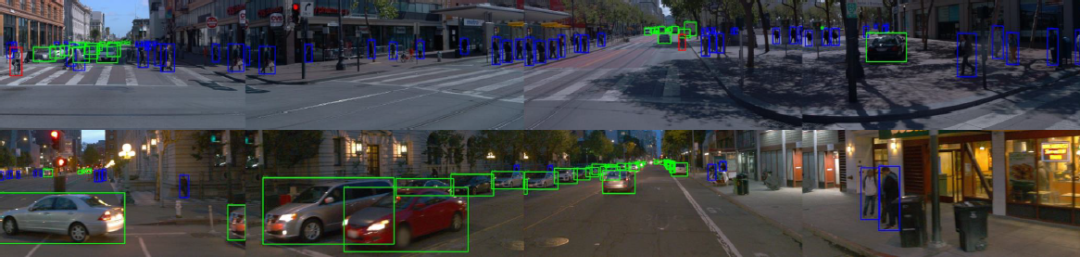
地平线这次在 Waymo 2020 的 2D 检测赛道获得了第二名,也同样用到了模型 ensemble 的方式。对于检测算法,他们团队考虑到两阶段算法和单阶段 anchor-free 算法在检测结果多样性方面的互补,以及 anchor-free 算法在拥挤、小目标场景下更好的效果,选用了 Cascade R-CNN 和 CenterNet 的结合。
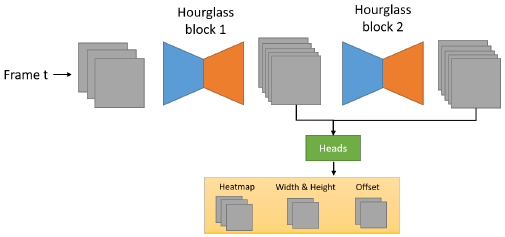
其中 CenterNet 部分,采用了两组 Hourglass104 网络作为 backbone,其中第一组的输出只在训练的时候为提供 auxilliary loss,具体见下图。
1.2 训练策略
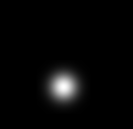
另外,还引入了 AAAI 2020 中针对 CenterNet 这类算法框架提出的训练策略改进 TTF [2],为了提供更多高质量的正样本。由于 CenterNet 所采用的高斯核只考虑了中心点和与之距离的因素,在 x,y 方向共用一组标准差,生成了圆形的高斯 mask:

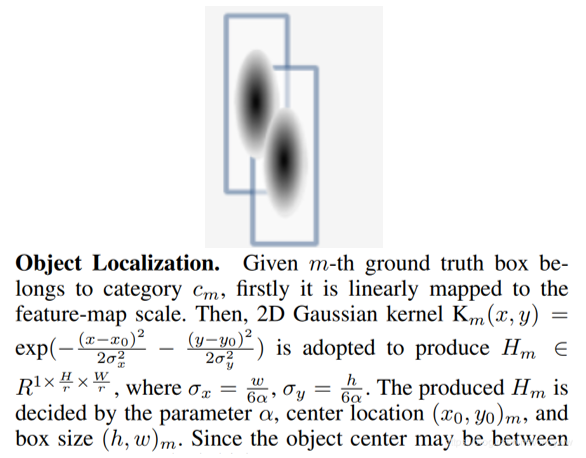
而 TTF 中则是考虑到了目标的 aspect ratio,提出了多样的标准差:
上述的这种只是对中心点回归训练的改进,接下来是对目标框宽高的回归的改进。原始的 CenterNet 假设预测得到的中心点绝对准确,所以可以通过宽高得到最终的目标框。但是 TTF 默认预测得到中心点不一定准确,所以预测的是中心点距离两个角点的 offset:

对于 anchor 的设定则是在原始的 0.5,1,2 基础上,考虑到车辆,加入了 0.25 和 0.75 两种 aspect ratio。与此同时,考虑到部分标注错误,还加入了 label smoothing。
1.3 模型ensemble
接下来就是模型 ensemble了,除了 Cascade RCNN 和 CenterTrack 的结合,还考虑到了不同尺度输入策略(对于前者选取了 0.8,1.0,1.2 三种尺度,对于后者选取了 0.5,0.75,1,1.25,1.5 五种尺度),当然还有不同训练代数、策略下不同的模型,还有不同后处理的结果。
作者团队将不同检测框架和不同推理策略进行组合,通过二叉树来构建贪婪式的自动 ensemble 框架:
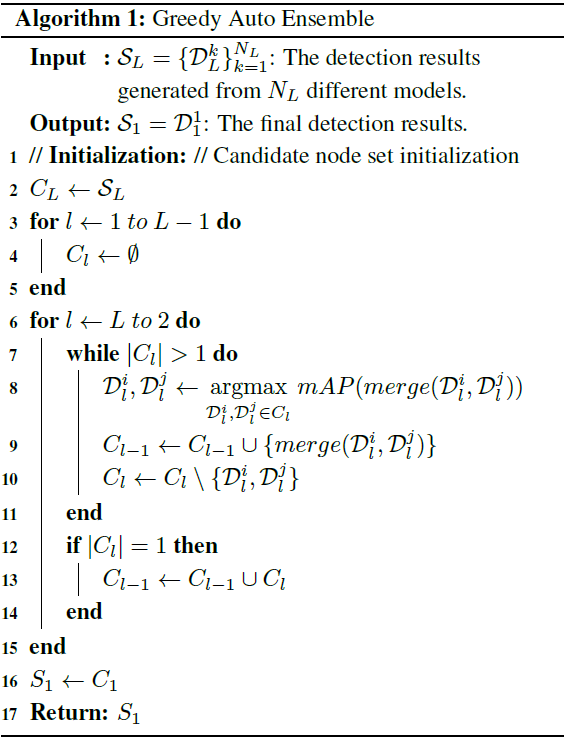
每组模型的评价由验证集上的 mAP 指标为准,模型结果的融合则是基于不
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3473
3473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









