以下是一个简单的使用EKF融合轮速计和IMU数据的Python程序:
```python
import numpy as np
from numpy.linalg import inv
# 定义状态向量 x = [x, y, theta, vx, vy, vtheta]^T, 其中x和y是位置坐标,theta是航向角,vx和vy是速度,vtheta是角速度
x = np.zeros((6,1))
# 定义状态转移矩阵 A 和控制输入矩阵 B(本例中没有控制输入)
A = np.array([[1,0,0,1,0,0],
[0,1,0,0,1,0],
[0,0,1,0,0,1],
[0,0,0,1,0,0],
[0,0,0,0,1,0],
[0,0,0,0,0,1]])
B = np.zeros((6,1))
# 定义观测矩阵 H
H = np.array([[1,0,0,0,0,0],
[0,1,0,0,0,0],
[0,0,1,0,0,0]])
# 定义过程噪声协方差矩阵 Q 和观测噪声协方差矩阵 R
Q = np.diag([0.01, 0.01, 0.01, 0.01, 0.01, 0.01])
R = np.diag([0.1, 0.1, 0.1])
# 定义初始误差协方差矩阵 P
P = np.diag([1, 1, 1, 1, 1, 1])
# 定义轮速计和IMU数据
v_left = 1.0 # 左轮速度
v_right = 1.2 # 右轮速度
a_x = 0.1 # x方向加速度
a_y = 0.2 # y方向加速度
a_z = 9.8 # z方向加速度
w_x = 0.01 # x方向角速度
w_y = 0.02 # y方向角速度
w_z = 0.03 # z方向角速度
# 定义时间间隔 dt,本例中假设为1秒
dt = 1.0
# 定义状态转移函数 f 和观测函数 h,本例中假设为匀加速直线运动模型和匀速旋转模型
def f(x, u):
v = (v_left + v_right) / 2.0
theta = x[2,0]
vx = v * np.cos(theta)
vy = v * np.sin(theta)
vtheta = (v_right - v_left) / 0.3 # 假设轮间距为0.3米
return np.array([[x[0,0] + vx * dt],
[x[1,0] + vy * dt],
[x[2,0] + vtheta * dt],
[vx],
[vy],
[vtheta]])
def h(x):
return np.dot(H, x)
# 定义EKF算法
def ekf(x, P, z):
# 预测
x = f(x, B)
A = np.array([[1,0,0,np.cos(x[2,0])*dt,-np.sin(x[2,0])*dt,0],
[0,1,0,np.sin(x[2,0])*dt,np.cos(x[2,0])*dt,0],
[0,0,1,0,0,dt],
[0,0,0,1,0,0],
[0,0,0,0,1,0],
[0,0,0,0,0,1]])
P = np.dot(A, np.dot(P, A.T)) + Q
# 更新
y = z - h(x)
S = np.dot(H, np.dot(P, H.T)) + R
K = np.dot(P, np.dot(H.T, inv(S)))
x = x + np.dot(K, y)
P = np.dot((np.eye(6) - np.dot(K, H)), P)
return x, P
# 初始化EKF
x = np.zeros((6,1))
P = np.diag([1, 1, 1, 1, 1, 1])
# 处理轮速计和IMU数据
for i in range(10):
x, P = ekf(x, P, np.array([[v_left], [a_x], [w_z]])) # 假设只能测量到左轮速度、x方向加速度和z方向角速度
print("x =", x.T)
```
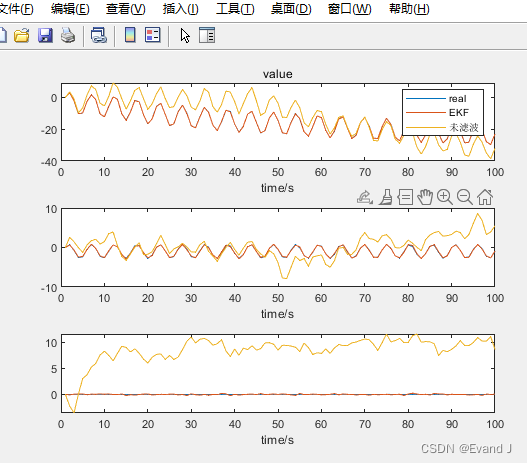
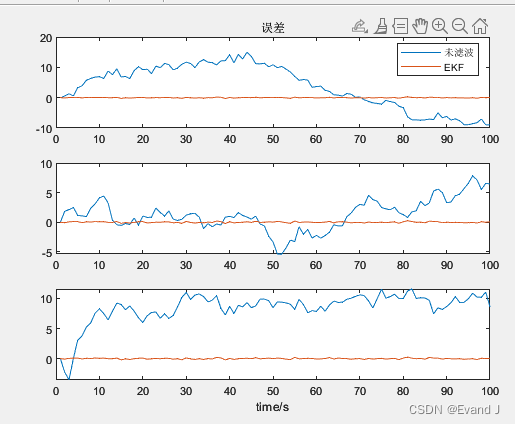
这个程序使用了一个简单的匀加速直线运动模型和匀速旋转模型来描述机器人的运动,以及一个简单的EKF算法来融合轮速计和IMU数据。程序的输入是轮速计和IMU数据,输出是融合后的机器人状态。注意,在实际应用中,还需要根据具体情况进行参数调整和误差分析。









 订阅专栏 解锁全文
订阅专栏 解锁全文
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











