







一、安装ros
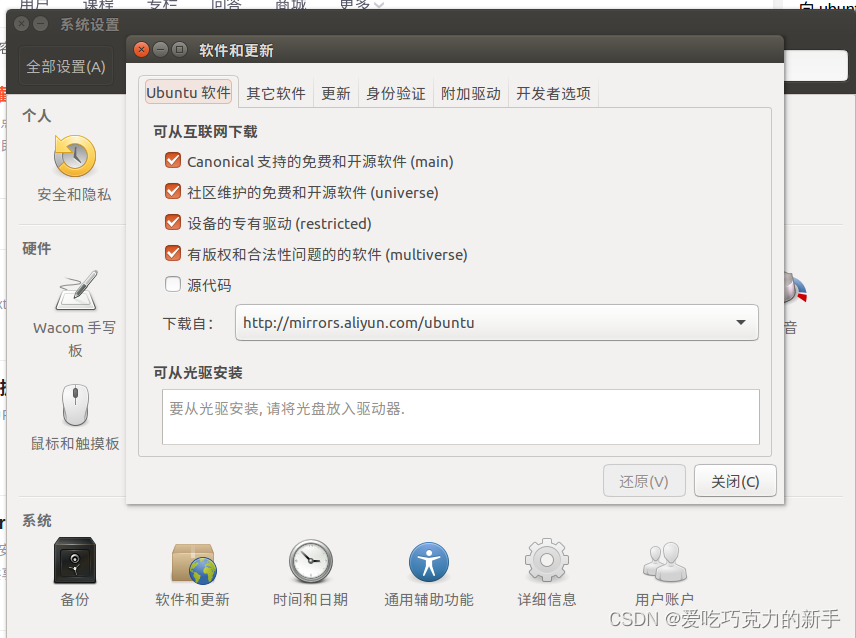
1.首先进入下边这个地方,确保设置成这样
2.开始在ubuntu终端中运行下边命令
每个人的操作不同会导致下边下载会出现不一样的错误,可以多看几个博客去执行对应的命令,就算我的会在你那报错也没关系,从头执行其他博客的命令,不需要进行对我的删除,这里值得说的是,以后装好ros后切忌不要随意进行卸载和删除的命令,如果需要,前提是你比较熟悉,不然会很头疼
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get updatesudo apt-get install ros-kinetic-desktop-fullsudo rosdep init
rosdep update上边rosdep init一步对于大部分人都将会出现问题,以前看过很多博客,都说去修该host文件,但经过我七八次重装的经验来说,确实没必要,已经有大佬解决了此问题,几行代码即可解决,代码如下
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep或者
sudo pip install rosdepc
sudo pip3 install rosdepc
sudo apt-get install python3-pip
sudo pip3 install rosdepc有一说一,一次不一定行,但可以循环多执行几次,基本上没问题
然后执行下边代码
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrcsudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential那这一步我们就完美的装好了我们的ros了。
此时去运行ros自带的测试小乌龟,若可以操作乌龟就证明安装彻底成功啦:
新开三个终端(记住是开三个终端),分别输入
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









