








下面对双电机功率分汇流电动拖拉机再生制动策略进行分析研究,验证电动拖拉机制动能量回收的可行性。
目前主要的再生制动控制策略有:基于回馈功率最大的控制策略、基于回馈效率最大的控制策略、基于最大制动电流的控制策略和基于恒定制动电流的控制策略等。
综合考虑安全性能、节约能量和制动感觉等因素选择恒定制动电流的控制策略,采用基于占空比控制规律的控制策略,实现再生制动系统制动电流的恒定,分析在给定不同恒流目标值情况下对再生制动过程中回收率的影响。
基于恒定制动电流的控制策略是把电机电枢电流作为控制对象,通过改变PWM波的占空比来保持电机电枢电流恒定,而电机制动力矩与电枢电流成正比关系,从而可以保持制动力矩恒定,使得电机转速呈线性下降,制动踏板开度和电制动力矩呈近似线性变化,提供给驾驶员较好的制动感觉,同时可以尽可能兼顾回收效率最大化。
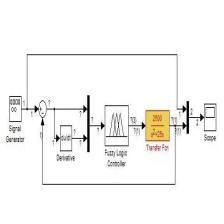
基于占空比控制规律的恒定制动电流控制策略流程图如图

图1 基于占空比控制规律的恒定制动电流控制策略流程图
在初始车速5km/h,基于占空比控制规律恒定制动电流为40A、60A、80A的再生制动系统仿真曲线如图2.1-2.9所示:

图2不同恒定制动电流的车速对比图

图2.1基于占空比控制规律的恒定制动电流40A车速仿真曲线

图2.2基于占空比控制规律的恒定制动电流40A电池电压仿真曲线

图2.3基于占空比控制规律的恒定制动电流为40A的电流仿真曲线

图2.4基于占空比控制规律的恒定制动电流60A车速仿真曲线

图2.5基于占空比控制规律的恒定制动电流60A电池电压仿真曲线

图2.7基于占空比控制规律的恒定制动电流80A车速仿真曲线

图2.8基于占空比控制规律的恒定制动电流80A电池电压仿真曲线

图2.9基于占空比控制规律的恒定制动电流为80A的电流仿真曲线
计算得到的电池回收能量和回收率的仿真数据如下表所示:
| 目标电流(A) | 初始车速 (km/h) | 电池的回收能量(kJ) | 回收率 (%) |
| 40 | 5 | 5.95 | 18.83 |
| 60 | 5 | 7.67 | 19.02 |
| 80 | 5 | 7.72 | 19.31 |
表2.1 不同恒定制动电流的电池回收能量和回收率仿真数据
上述控制算法中,均采用在相同的初始车速、相同的电池的初始电压等相同系统参数条件下进行再生制动能量回收,基于恒定制动电流控制策略有效回收电动拖拉机的制动能量,且具有输入变量少、鲁棒性较强的优点。
驾驶员模块
驾驶员模块采用的是PID控制,以目标车速与实际车速的车速差为输入,踏板开度为输出,通过设置合理的PID参数来更好的模拟驾驶员的操作习惯。决策控制架构如图

饱和模块的作用:将输入信号限制在较高和较低的饱和度值。需求转矩计算模块主要计算整车的需求转矩,在其中很重要的一个信号就是驾驶员的踏板信号,整车控制器可以根据踏板信号解析出驾驶员的意图,进而给电机控制器发送转矩或者转速指令来驱动整车。

















 901
901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











