







 本文介绍了基于遗传算法优化的自适应模糊控制器在MATLAB2013b中用于十字路口交通系统控制的仿真。系统包含绿灯和红灯交通强度控制模块,通过优化模糊控制器来决定交通相位转换。算法考虑了车流量、排队长度等因素,并通过历史数据使用遗传算法更新模糊隶属度函数,以适应不同的交通状况。
本文介绍了基于遗传算法优化的自适应模糊控制器在MATLAB2013b中用于十字路口交通系统控制的仿真。系统包含绿灯和红灯交通强度控制模块,通过优化模糊控制器来决定交通相位转换。算法考虑了车流量、排队长度等因素,并通过历史数据使用遗传算法更新模糊隶属度函数,以适应不同的交通状况。
1.软件版本
matlab2013b
2.本算法理论知识
设计一个对十字路口多功能控制的一个交通系统:包括基于遗传算法优化模糊控制器,车牌的自动识别技术。
单十字路口:

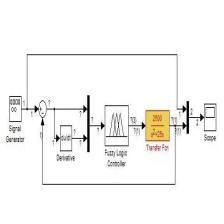
其中第一级控制为两个并行模块:绿灯交通强度控制模块与红灯交通强度控制模块。绿灯交通强度控制模块的输入为绿灯相位的排队长度与入口流量,输出绿灯相位的交通强度;红灯相位模块的输入为红灯相位的排队长度,输出为红灯相位的交通强度。
第二级控制是在第一级控制基础上的一个总控制模块,做出是否转换当前相位的决定。其输入为第一级两个模块的输出即绿灯相位交通强度与红灯相位交通强度&

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2089
2089

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











