







DD3D(Dense Depth-pre-trained 3D Detector)发表在了iccv 2021上,是目前(2022.01)性能最好的单目3D目标检测模型之一,值得一看。
代码:https://github.com/TRI-ML/dd3d![]() https://github.com/TRI-ML/dd3d精度对比:
https://github.com/TRI-ML/dd3d精度对比:
KITTI Cars Moderate Benchmark (Monocular 3D Object Detection) | Papers With Code

主要观点和贡献:
1. PL的主要局限是需要in-domain的depth fine-turning(两段式的结构没有办法啊),否则效果很差(不过我觉得就是, 你既然都去标注3D框了,再投影生成depth map也比较简单了吧)
2. 本文的方法,应该就是快吧,比如有一堆新数据要训练,PL的方法还要先fine turn一下深度网络,DD3D直接训练3D检测就可以了;
实现方式:
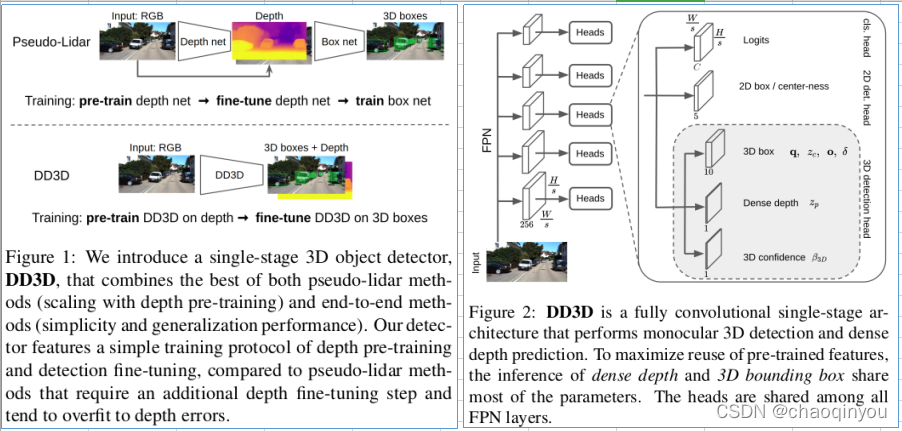
1. 结构上重FCOS修改而来, 主要是增加了3D检测头,比较明确 (其实head有点多,真正做inference的时候不用那么多吧);
2. loss:

3. 训练, 比较麻烦:
在coco上训练2D(或者用训练好的)-> depth-pre-train -> 3D bbox训练















 846
846











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









