







✅博主简介:本人擅长建模仿真、程序设计、论文写作与指导,项目与课题经验交流。项目合作可私信或扫描文章底部二维码。
码垛机器人广泛应用于物料搬运和自动化生产线中。随着技术的发展,码垛机器人的智能化和自动化程度不断提高,特别是在视觉识别和路径规划方面。本文聚焦于码垛机器人的控制算法,针对现有技术中的局限性,提出了一系列创新的解决方案,以提高码垛机器人的效率和精度。
视觉SLAM自动导航算法的改进
在码垛机器人中,视觉SLAM(Simultaneous Localization and Mapping)自动导航技术是实现精准定位和路径规划的关键。然而,传统视觉SLAM算法在复杂环境下的表现受到限制,尤其是在物体变化和环境干扰时,识别准确率和实时性显著下降。为此,本文提出了一种基于灰色预测的视觉SLAM自动导航算法。
首先,该算法利用视觉SLAM技术收集环境中的路标数据集,提取目标的类别和位置信息。随后,通过灰色预测方法对已有数据进行训练,使得系统在动态环境中能够预测和适应变化。接着,利用MoveIt!功能包实现自动导航的求解与规划,这一过程确保机器人能够在复杂的环境中做出及时反应。
此外,为了解决传统ICP(Iterative Closest Point)算法在位姿估计中的噪音问题,本文提出了一种融合ICP算法和EPnP(Efficient Perspective-n-Point)算法的位姿估计方法。通过分析比较这两种算法的优缺点,针对ICP算法在特征点未知情况下的失真问题,提出了一种改进的位姿估计方法,显著提高了定位精度。
机械臂轨迹控制算法的优化
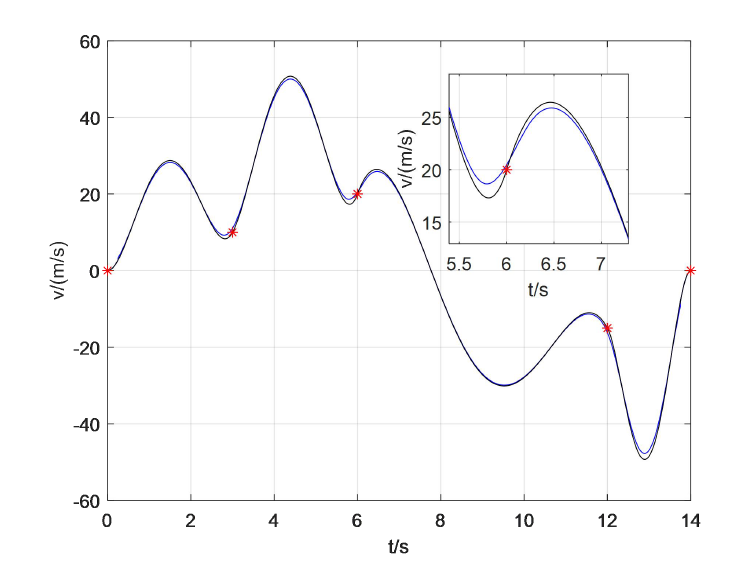
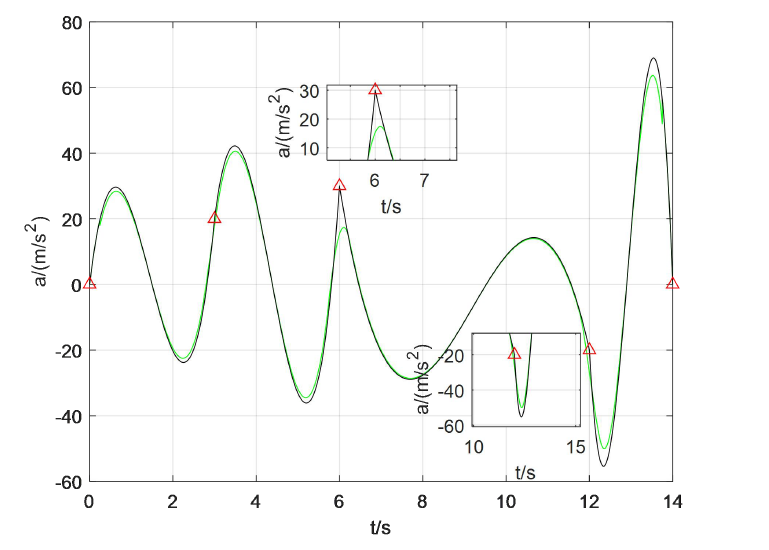
在码垛机器人的操作中,机械臂的轨迹控制至关重要。现有的五次样条插值算法在控制机械臂运动时,常常出现角速度和角加速度异常的问题。为了解决这一问题,本文结合滑动平均滤波算法,提出了一种新的机械臂轨迹控制算法。
首先,在五次样条插值算法的基础上,利用滑动平均滤波算法对异常数据进行清洗。通过对机械臂的运动进行平滑处理,能够有效消除因外界干扰导致的突发异常,从而保证机械臂的平稳运行。此外,基于关节空间运动建立的递推正向动力学模型为轨迹控制提供了理论支持,确保了运动的精确性。
这一新算法的实施使得机械臂在进行码垛作业时,能够更加稳定和高效,减少了因运动不平稳引起的误操作风险。通过多次实验验证,该算法的有效性得到了充分体现。
码垛机器人系统的仿真与验证
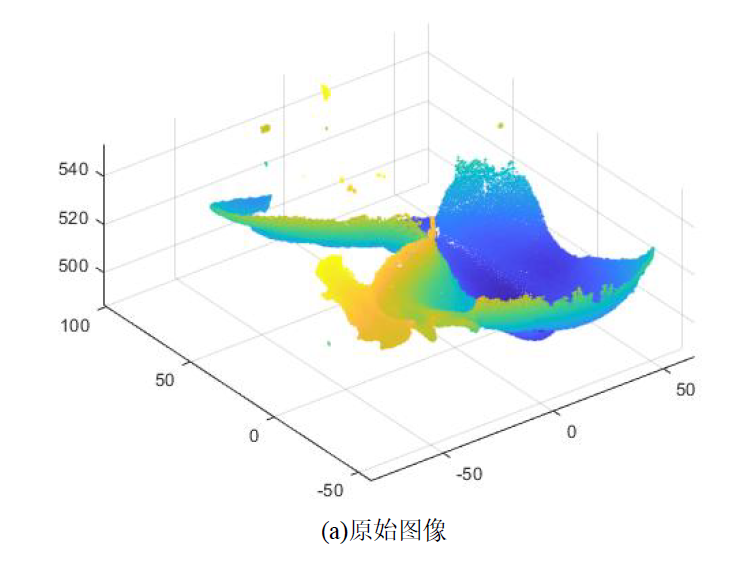
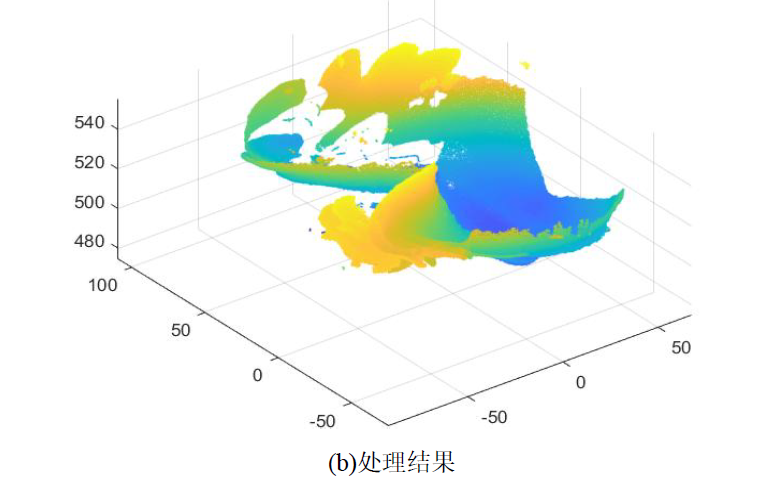
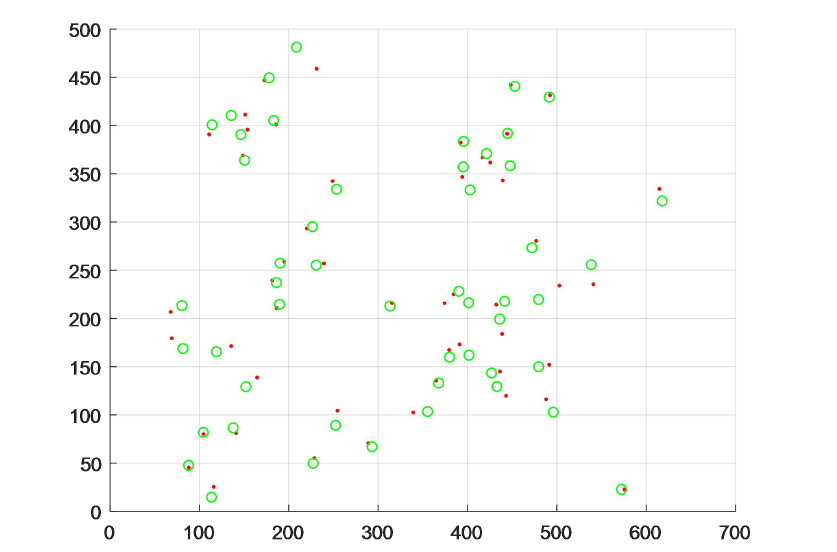
在对码垛机器人系统进行综合测试时,重点关注了避障、自动导航和搬运等功能的仿真结果。通过建立完整的仿真模型,系统能够在多种工作环境中进行测试。实验表明,基于灰色预测的视觉SLAM自动导航算法在单一背景下表现出良好的鲁棒性和稳定性,显著提高了系统的路径控制精度,路标的拟合程度提高了50%。
此外,在进行未知深度的点云识别时,系统能够更准确地处理数据,验证了所提出算法在实际应用中的有效性。这些研究为机器视觉技术在智能化产业中的应用提供了重要参考,也为工业码垛机器人的发展奠定了坚实基础。
% Particle Swarm Optimization for Palletizing Robot Control
% Parameters initialization
num_particles = 30; % Number of particles
max_iterations = 100; % Maximum number of iterations
Kp = rand(num_particles, 1) * 10; % Proportional gain
Ki = rand(num_particles, 1) * 10; % Integral gain
Kd = rand(num_particles, 1) * 10; % Derivative gain
% Fitness evaluation
fitness = zeros(num_particles, 1);
for iter = 1:max_iterations
for i = 1:num_particles
% Simulate system response and calculate performance metrics
fitness(i) = evaluate_performance(Kp(i), Ki(i), Kd(i)); % Custom function for performance metrics
end
% Update personal and global best positions
[best_fitness, best_index] = min(fitness);
for i = 1:num_particles
% Update particle positions based on best known positions
Kp(i) = Kp(i) + rand() * (Kp(best_index) - Kp(i));
Ki(i) = Ki(i) + rand() * (Ki(best_index) - Ki(i));
Kd(i) = Kd(i) + rand() * (Kd(best_index) - Kd(i));
end
end
% Display optimal PID parameters
fprintf('Optimal Kp: %.4f\n', Kp(best_index));
fprintf('Optimal Ki: %.4f\n', Ki(best_index));
fprintf('Optimal Kd: %.4f\n', Kd(best_index));
function performance = evaluate_performance(Kp, Ki, Kd)
% Simulate the system with given PID parameters
% Implement the control algorithm and calculate performance metrics
performance = rand(); % Placeholder for actual performance calculation
end


















 898
898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











