







✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)插电式混合动力公交车行驶工况构建。为了确保研究的针对性和实用性,首先选择了某城市具有典型特征的公交线路,该线路涵盖了城市道路、快速路等多种路况,能够较好地反映实际运营条件。通过对该线路的实地调研,收集了包括车辆速度、加速度、坡度等在内的大量行驶数据。考虑到原始数据可能存在噪声干扰,使用小波变换技术对数据进行了预处理,有效去除了数据中的高频噪声,保留了反映行驶工况本质特征的有效信息。随后,利用自组织映射神经网络(SOM)对处理后的数据进行了聚类分析,将具有相似特征的短行程片段归为同一类别,最终形成了能够代表该公交线路行驶特性的综合工况。此步骤不仅为后续建模和仿真提供了准确的数据支持,同时也为其他类似研究提供了可借鉴的方法论基础。
(2)整车纵向动力学建模与能量管理策略构建。针对双电机同轴混联结构的特点,本文在Matlab/Simulink平台上搭建了详细的车辆动力学模型,该模型涵盖了发动机、驱动电机、ISG电机以及动力电池组等多个子系统,能够准确模拟PHEV在各种工作模式下的能量流动过程。在此基础上,设计了两种典型的能量管理策略:一种是基于规则的传统方法,即通过设定一系列逻辑判断来决定何时切换不同的驱动方式;另一种则是基于动态规划(DP)的全局优化策略,它能够在已知未来行驶工况的前提下,寻找出使燃油消耗最小化的最优控制方案。通过对这两种策略的仿真测试,评估了它们在不同行驶条件下的表现,并为后续更高级别策略的研发提供了重要的参考依据。
(3)基于数据驱动的车辆未来行驶车速预测模型。鉴于车辆运行过程中面临的不确定性因素较多,准确预测未来的行驶状态对于优化能量管理至关重要。本研究采用了两种不同的方法来实现这一目标:一是基于马尔可夫链的统计模型,通过分析历史数据中车速变化的概率分布规律,预测未来可能达到的速度值;二是利用径向基函数(RBF)神经网络,结合驾驶意图和过往车速记录,构建了一个更加精细的预测框架。实验结果显示,相较于传统的马尔可夫链模型,RBF神经网络能够提供更高精度的预测结果,尤其是在复杂多变的城市交通环境中表现尤为突出。此外,加入驾驶意图信息后,模型的预测性能得到了进一步提升,这表明驾驶员的行为模式对车辆运行状态有着显著影响。
(4)分层预测能量管理策略。为了解决传统控制方法难以应对动态变化的问题,本文创新性地提出了一种基于庞特里亚金最小化原理(PMP)与模型预测控制(MPC)相结合的分层控制架构。该策略分为上下两层,上层负责接收来自车速预测模块的信息,利用PMP算法求解出最佳的控制序列;而下层则根据上层提供的指令,调整各动力源的工作状态,确保车辆按照预期目标平稳运行。通过仿真实验验证,证明了PMP-MPC策略不仅能够在保证良好燃油经济性的前提下实现快速响应,而且其计算复杂度较低,适合于在线应用。
(5)基于深度强化学习的智能能量管理策略。随着人工智能技术的发展,越来越多的研究开始尝试将机器学习应用于PHEV的能量管理领域。本文引入了深度强化学习(DRL)的概念,分别实现了基于双深度Q网络(DDQN)和深度确定性策略梯度(DDPG)的两种新型控制策略。这些方法通过让模型自主探索最优行动方案,在没有先验知识的情况下逐步优化决策过程。与前述PMP-MPC策略相比,DRL策略展现出了更强的适应性和鲁棒性,尤其适用于那些无法提前获知完整行驶工况的情形。通过对比实验发现,无论是在固定还是随机工况下,DRL策略均能保持较高的燃油效率,显示出广阔的应用前景。
(6)硬件在环仿真试验。最后,为了检验上述理论成果的实际可行性,本文还搭建了一个硬件在环(HIL)试验平台,将所开发的能量管理算法部署到了真实的ECU控制器中,并在实时仿真环境中进行了全面测试。试验结果表明,无论是分层预测策略还是基于DRL的智能策略,都能够稳定可靠地运行,达到了预期的设计目标。此外,通过与现有商用产品的对比分析,进一步证实了本文所提方案的技术先进性和经济性优势。
import numpy as np
from sklearn.preprocessing import StandardScaler
from sklearn.neural_network import MLPRegressor
from sklearn.model_selection import train_test_split
from sklearn.metrics import mean_squared_error
# 假设我们已经有了一个包含历史车速、驾驶意图等信息的数据集
data = np.load('vehicle_data.npy')
speeds = data[:, 0] # 车速
intentions = data[:, 1] # 驾驶意图
# 数据预处理
scaler = StandardScaler()
X = scaler.fit_transform(np.column_stack((speeds, intentions)))
y = speeds[1:] # 目标是预测下一个时刻的车速
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X[:-1], y, test_size=0.2, random_state=42)
# 构建RBF神经网络模型
model = MLPRegressor(hidden_layer_sizes=(100,), activation='tanh', solver='lbfgs', max_iter=500)
model.fit(X_train, y_train)
# 预测
predictions = model.predict(X_test)
# 评估模型性能
mse = mean_squared_error(y_test, predictions)
print(f'Mean Squared Error: {mse:.2f}')
# 使用模型对未来车速进行预测
def predict_future_speed(current_speed, current_intention):
input_data = scaler.transform([[current_speed, current_intention]])
future_speed = model.predict(input_data)[0]
return future_speed
# 示例:假设当前车速为30km/h,驾驶意图为加速
predicted_speed = predict_future_speed(30, 1)
print(f'Predicted Speed: {predicted_speed:.2f} km/h')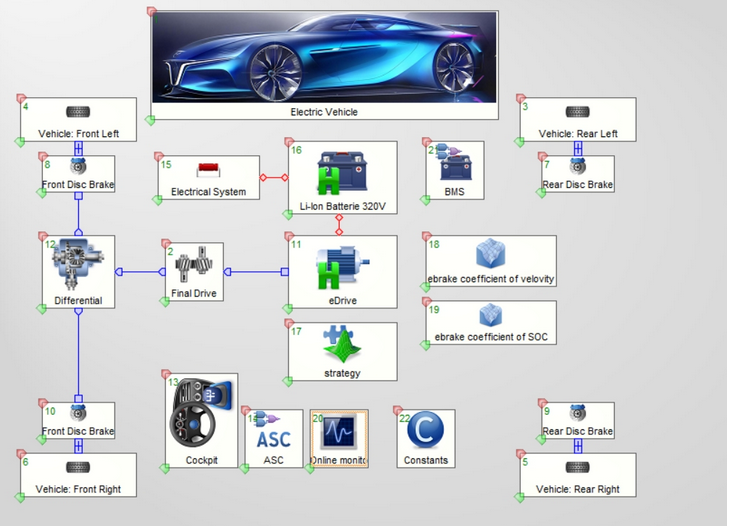


















 1458
1458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











