






5.1先决条件
确保已经下载ros-indigo-ros-tutorials,没有则输入下面指令下载:
sudo apt-get install ros-indigo-ros-tutorials5.2图概念概述:
(认真看一下就过,不理解后面回来再看)
Nodes:节点,一个节点就是一个可执行文件,通过ros与其他节点通信
Messages:消息,ROS数据类型,用于订阅和发布话题。
Topics:话题,节点可以发布消息和话题,也可以订阅话题以接受消息。
Master:节点管理器,帮助节点找到彼此
roscore:主机+rosout+参数服务器(参数服务器后面有介绍)
5.3客户端库
这个东东就是允许你使用不同编程语言编写的节点之间互相通信
比如rospy=python客户端库
roscpp=c++客户端库
5.4 使用roscore
运行所有ROS程序前首先要运行的下面这个命令,类似于初始化功能(比如自动打开master等)
roscore会输出:
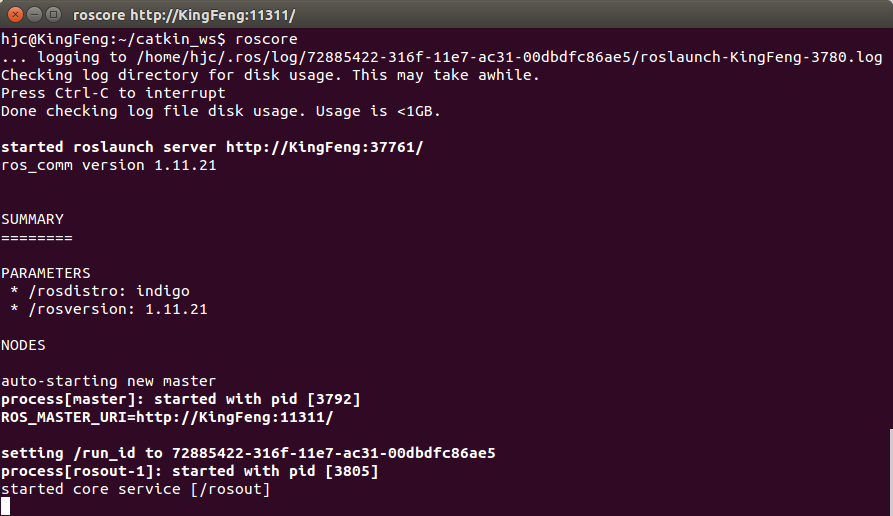
如果无法正常初始化,官网有3中问题的解决办法
(http://wiki.ros.org/cn/ROS/Tutorials/UnderstandingNodes)
关闭roscore使用ctrl+c
5.5使用rosnode
这里需要在新的终端上操作,但保证刚刚那个终端是仍然运行且已经roscore了。
在新终端输入rosnode显示当前运行的ros节点信息,rosnode list是列出活跃节点
试一下
rosnode list会返回 /rosout ,rosout节点是用于手机和记录节点调试输出信息,所以它总是运行的。
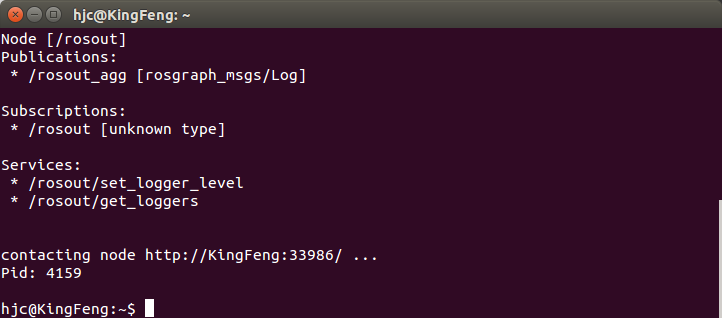
rosnode info命令返回的是关于一个特定节点的信息
rosnode info /rosout返回
5.6使用rosrun
用法是 rosrun [package_name] [node_name]
尝试运行一下turtlesim包中的turtlesim_node
在新终端下
rosrun turtlesim turtlesim_node
会弹出turtlesim窗口
如果看到其他乌龟,只是ros给你的惊喜。没别的。关闭使用ctrl+c或X掉窗口。
如果此时在新终端再输入rosnode list
会返回
/rosout
/turtlesim
ROS允许通过命令行重新给节点改名:
rosrun turtlesim turtlesim_node __name:=my_turtle会看到
/rosout
/my_turtle
如果仍然看到/turtlesim在列表中,如下,说明使用ctrl+c停止(还有个原因,可以自己去官网),可以通过rosnode cleanup清除rosnode列表,记得按y。
rosnode可以ping节点
rosnode ping my_turtle















 2027
2027











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









