目录
1.TRACK线程整体流程
2.恒速模型跟踪
应用场景
具体流程
3.参考关键帧跟踪
具体流程
4. 重定位跟踪原理
应用场景
思想
具体流程
检测重定位候选关键帧
1.TRACK线程整体流程
ORB-SLAM2跟踪部分主要包括两个阶段,第一个阶段包括三种跟踪方法:用参考关键帧来跟踪、恒速模型跟踪、重定位跟踪,它们的目的 是保证能够“跟的上”,但估计出来的位姿可能没那么准确。第二个阶段是局部地图跟踪,将当前帧的局部关键帧对应的局部地图点投影到该 帧,得到更多的特征点匹配关系,对第一阶段的位姿再次优化得到相对准确的位姿。
跟踪线程流程图

Track线程的主要在track中主要实现的。主要的实现步骤看流程图即可理解。其实总结一下就是如果跟踪正常,按恒速模型跟踪,如果不正常或者跟丢不断地使用关键帧或者重定位寻找。若实在不行只能重置。
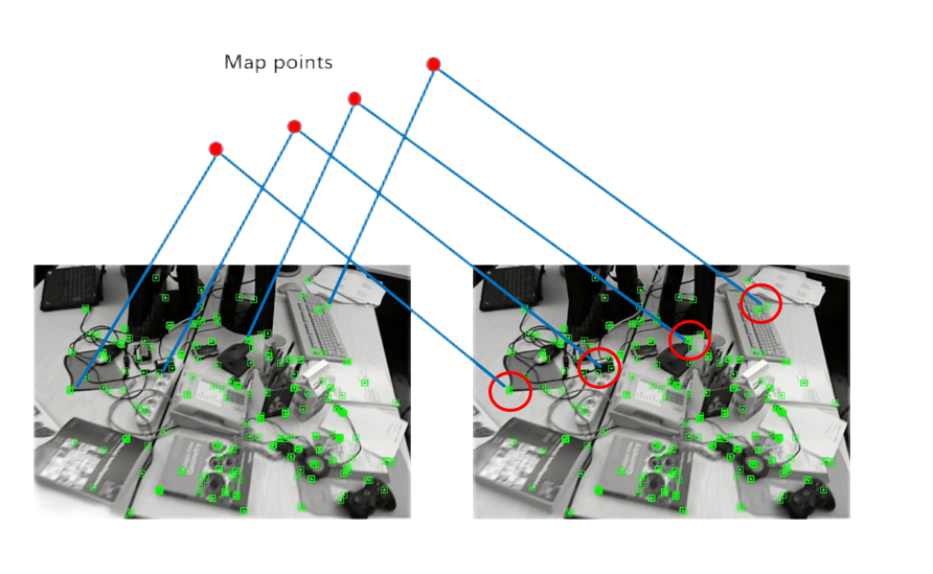
2.恒速模型跟踪
对应函数Tracking::TrackWithMotionModel(),示意图如下:
应用场景
1.
用恒速模型先估计一个初始位姿
2.
用该位姿进行投影匹配
SearchByProjection
,候选点来自
GetFeaturesInArea
,未使用
BoW
3. BA
优化(仅优化位姿),提供比较粗糙的位姿
思想
1.假设短时间内(相邻帧)物体处于匀速运动状态,可以用上一帧的位姿和速度来估计当前帧的位姿。
2.移动模式跟踪
跟踪前后两帧
得到变换矩阵。
3.上一帧的地图
3d
点反投影到当前帧图像像素坐标上,在不同尺度下不同的搜索半径内,做描述子匹配搜索可以加快匹配。
4.在投影点附近根据描述子距离进行匹配(需要
>20
对匹配,否则匀速模型跟踪失败
,
运动变化太大时会出现这种情况),然后以运动模型预测 的位姿为初值,优化当前位姿
5.优化完成后再剔除外点,若剩余的匹配依然
>=10
对,则跟踪成功,否则跟踪失败,需要
Relocalization
具体流程
1
:创建
ORB
特征点匹配器 最小距离
< 0.9*
次小距离 匹配成功
2:更新上一帧的位姿和地图点
单目:只计算了上一帧世界坐标系位姿就退出了。
Tlr*Trw = Tlw
3:使用当前的运动速度
(
之前前后两帧位姿变换
)
和上一帧的位姿来初始化 当前帧的位姿
R,t
4:在当前帧和上一帧之间搜索匹配点(
matcher.SearchByProjection)
(1)通过投影
(
使用当前帧的位姿
R,t)
,对上一帧的特征点
(
地图点
)
进行跟踪
.
(2)上一帧
3d
点投影到当前坐标系下,在该
2d
点半径
th
范围内搜索可以匹配的匹配点
(3)遍历可以匹配的点,计算描述子距离,记录最小的匹配距离,小于阈值的,再记录匹配点特征方向差值
(4)进行方向验证,剔除方向差直方图统计中,方向差值数量少的点对,保留前三个数量多的点对。
5:如果找到的匹配点对如果少于
20
,则扩大搜索半径
th=2*th,
使用
SearchByProjection()
再次进行搜索。
6:使用匹配点对对当前帧的位姿进行优化
G2O
图优化
7:如果
2d-3d
匹配效果差,被标记为外点,则当前帧
2d
点对于的
3d
点设置为空,留着以后再优化
8:根据内点的匹配数量,判断 跟踪上一帧是否成功。
3.参考关键帧跟踪
对应函数 tracking::TrackReferenceKeyFrame()

应用场景
:没有速度信息的时候、刚完成重定位、或者恒速模型跟踪失败后使用,大部分时间不用。只利用到了参考帧的信息。
1.
匹配方法是
SearchByBoW
,匹配当前帧和关键帧在同一节点下的特征点,不需要投影,速度很快
2. BA
优化(仅优化位姿),提供比较粗糙的位姿
思路
:
当使用恒速模型匹配到的特征点数较少时,就会选用关键帧模式跟踪。
思路是:尝试和最近一个关键帧去做匹配。为了快速匹配,利用了
bag of words
(
BoW
)来加速匹配
具体流程
1.计算当前帧的BoW;
2.通过特征点的bow加快当前帧和参考帧之间的特征点匹配。使用函数matcher.SearchByBoW()。
(1)对属于同一node(同一node才可能是匹配点)的特征点通过描述子距离进行匹配,遍历该node 中特征点,特征点最小距离明显小于次小距离才作为成功匹配点,记录特征点对方向差统计到直方图
(2)记录特征匹配成功后每个特征点对应的MapPoint(来自参考帧),用于后续3D-2D位姿优化
(3)通过角度投票进行剔除误匹配
3.将上一帧的位姿作为当前帧位姿的初始值(加速收敛),通过优化3D-2D的重投影误差来获得准确位姿。3D-2D来自第2步匹配成功的参考
帧和当前帧,重投影误差 e = (u,v) - project(Tcw*Pw),只优化位姿Tcw,不优化MapPoints的坐标。
顶点 Vertex: g2o::VertexSE3Expmap(),初始值为上一帧的Tcw
边 Edge(单目): g2o::EdgeSE3ProjectXYZOnlyPose(),一元边 BaseUnaryEdge
边
Edge
(单目)
: g2o::EdgeSE3ProjectXYZOnlyPose()
,一元边
BaseUnaryEdge
+
顶点
Vertex
:待优化当前帧的
Tcw
+
测量值
measurement
:
MapPoint
在当前帧中的二维位置
(u,v)
+
误差信息矩阵
InfoMatrix: Eigen::Matrix2d::Identity()*invSigma2(
与特征点所在的尺度有关
)
+
附加信息: 相机内参数:
e->fx fy cx cy
3d
点坐标
:
e->Xw[0] Xw[1] Xw[2] 2d
点对应的上一帧的
3d
点
优化多次,根据边误差,更新
2d-3d
匹配质量内外点标记,当前帧设置优化后的位姿。
4
剔除优化后的
outlier
地图点
lower_bound( begin,end,num)
:从数组的
begin
位置到
end-1
位置二分查找第一个大于或等于
num
的数字,找到返回该数字的地址,不存在
则返回
end
。通过返回的地址减去起始地址
begin,
得到找到数字在数组中的下标。
upper_bound( begin,end,num)
:从数组的
begin
位置到
end-1
位置二分查找第一个大于
num
的数字,找到返回该数字的地址,不存在则返
回
end
。通过返回的地址减去起始地址
begin,
得到找到数字在数组中的下标。
4. 重定位跟踪原理
对应函数Tracking::Relocalization()
应用场景
跟踪丢失的时候使用,很少使用。利用到了相似候选帧的信息。
1.
用
BoW
先找到与该帧相似的候选关键帧(函数
DetectRelocalizationCandidates
)
2.
遍历候选关键帧,用
SearchByBoW
快速匹配,
3.
匹配点足够的情况下用
EPnP
计算位姿并取出其中内点做
BA
优化(仅优化位姿),
4.
如果优化完内点较少,通过关键帧投影生成新的匹配(函数
SearchByProjection
),
5.
对匹配结果再做
BA
优化(仅优化位姿)。
思想
当
TrackWithMotionModel
和
TrackReferenceKeyFrame
都没有跟踪成功,位置丢失后,需要在之前的关键帧中匹配最相近的关键帧,进
而求出位姿信息。
使用当前帧的
BoW
特征映射,在关键帧数据库中寻找相似的候选关键帧,因为这里没有好的初始位姿信息,需要使用传统的
3D-2D
匹配点的
EPnP
算法来求解一个初始位姿,之后再使用最小化重投影误差来优化更新位姿。
具体流程
1
:计算当前帧的
BoW
向量和
Feature
向量
2
:在关键帧数据库中找到与当前帧相似的候选关键帧组
3
:创建
ORB
特征点匹配器 最小距离
< 0.75*
次小距离 匹配成功。
ORBmatcher matcher(0.75,true);
4
:遍历每一个候选关键帧使用
BOW
特征向量加速匹配,匹配太少的去掉,选择符合要求的候选关键帧用其地图点为其创建
pnp
优化器
5
:使用
PnPsolver
位姿变换求解器
,
更加
3d-2d
匹配点
6
点直接线性变换
DLT,
后使用
QR
分解得到
R,t,
或者使用
(P3P)
,
3
点平面匹配算法求解。
这里会结合
Ransac
随采样序列一致性算法,来提高求解的鲁棒性。
6
:
EPnP
算法迭代估计姿态作为当前帧的初始位姿,使用最小化重投影误差
BA
算法来优化位姿
7
:如果优化时记录的匹配点对内点数量少于
50
,想办法再增加匹配点数量:通过投影的方式对之前未匹配的点进行
3D-2D
匹配,又给了一 次重新做人的机会
8
: 如果新增的数量加上之前的匹配点数量 大于
50
,再次使用 位姿优化算法进行优化
9
:如果上面优化后的内点数量还比较少,还想挽留一下,就缩小搜索窗口重新投影匹配(比之前使用更多的地图点了),如果最后匹配次
数大于
50
,就认为是可以勉强扶起来的阿斗,再给
BA
位优化一次。否则,放弃了(真的已经仁至义尽了!)
10
:如果经过上面一系列的挽救操作,内点数量 大于等于
50
,则重定位成功。
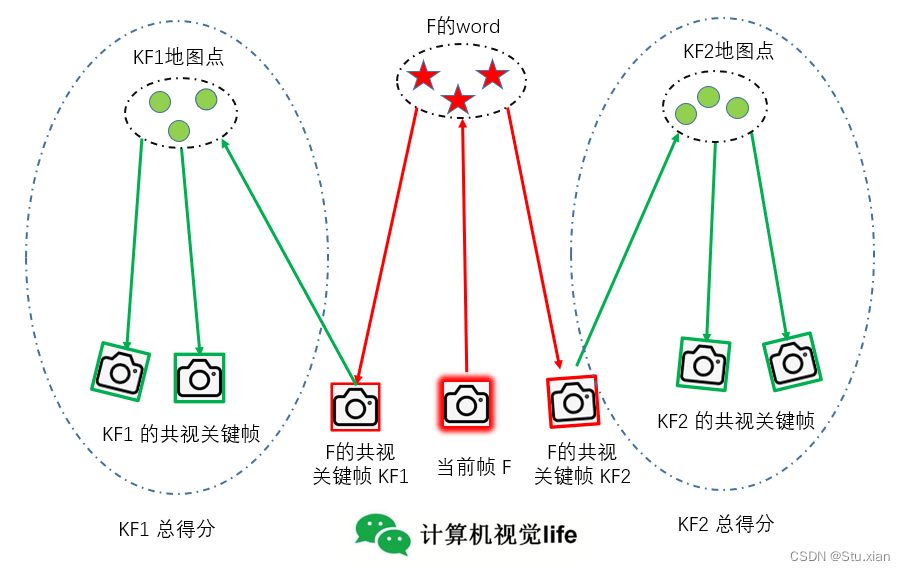
检测重定位候选关键帧
对应函数
DetectRelocalizationCandidates

























 528
528











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









