






 本文介绍了全球多个顶尖的SLAM(同时定位与建图)领域的实验室,包括香港科技大学、瑞士苏黎世联邦理工、德国慕尼黑工业大学等,涵盖了空中机器人、无人驾驶、视觉SLAM等多个方向的研究成果和代表性工作。动态SLAM在数据集上的进展也得到了提及,如TUM-RGBD和KITTI数据集在评估动态环境下的性能中扮演重要角色。
本文介绍了全球多个顶尖的SLAM(同时定位与建图)领域的实验室,包括香港科技大学、瑞士苏黎世联邦理工、德国慕尼黑工业大学等,涵盖了空中机器人、无人驾驶、视觉SLAM等多个方向的研究成果和代表性工作。动态SLAM在数据集上的进展也得到了提及,如TUM-RGBD和KITTI数据集在评估动态环境下的性能中扮演重要角色。
SLAM领域优秀实验室
目录
香港科技大学机器人与多感知实验室 RAM-LAB(刘明教授)
2.瑞士苏黎世联邦理工计算机视觉与几何实验室(Marc Pollefeys&&Johannes L. Schönberger)
1.香港科技大学
香港科技大学空中机器人实验室(沈邵劼教授)
研究方向:空中机器人在复杂环境下的自主运行,包括状态估计、建图、运动规划、多机器人协同以及低成本传感器和计算组件的实验平台开发。
实验室主页:HKUST Aerial Robotics Group
发表论文:Publications – HKUST Aerial Robotics Group
公开代码:HKUST Aerial Robotics Group · GitHub
Qin T, Li P, Shen S. Vins-mono: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020.(代码:https://github.com/HKUST-Aerial-Robotics/VINS-Mono )
Wang K, Gao F, Shen S. Real-time scalable dense surfel mapping[C]//2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 6919-6925.(代码:https://github.com/HKUST-Aerial-Robotics/DenseSurfelMapping )
香港科技大学机器人与多感知实验室 RAM-LAB(刘明教授)
研究方向:无人车;无人船;室内定位;机器学习。
实验室主页:自动驾驶汽车 ·机器人与多感知实验室 (ram-lab.com)
发表论文:Publications · Robotics and Multiperception Lab (ram-lab.com)
Ye H, Chen Y, Liu M. Tightly coupled 3d lidar inertial odometry and mapping[C]//2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 3144-3150.(代码:https://github.com/hyye/lio-mapping )
Jianhao Jiao, Haoyang Ye, Yilong Zhu, Ming Liu, “Robust Odometry and Mapping for Multi-LiDAR Systems with Online Extrinsic Calibration,” IEEE Transactions on Robotics (T-RO), 2021.
2.瑞士苏黎世联邦理工计算机视觉与几何实验室(Marc Pollefeys&&Johannes L. Schönberger)
研究方向:定位、三维重建、语义分割、机器人视觉
实验室主页:计算机视觉和几何组 (ethz.ch)
发表论文汇总:Robotics and Perception Group (uzh.ch)
公开代码:https://github.com/uzh-rpg
顶会老多
视觉语义里程计:Lianos K N, Schonberger J L, Pollefeys M, et al. Vso: Visual semantic odometry[C]//Proceedings of the European conference on computer vision (ECCV). 2018: 234-250.
ESS: Learning Event-based Semantic Segmentation from Still Images European Conference on Computer Vision (ECCV), Tel Aviv, 2022. ECCV22_Sun.pdf (uzh.ch)
Voxel Map for Visual SLAM IEEE International Conference on Robotics and Automation (ICRA), 2020. Voxel Map for Visual SLAM (uzh.ch)
3.德国慕尼黑工业大学计算机视觉组
研究方向:三维重建、机器人视觉、深度学习、视觉 SLAM 等
实验室主页:https://vision.in.tum.de/research/vslam
发表论文汇总:https://vision.in.tum.de/publications
https://github.com/tum-vision 公开代码:https://github.com/tum-vision
代表作:DSO、LDSO、LSD_SLAM、DVO_SLAM
DM-VIO: Delayed Marginalization Visual-Inertial Odometry (L. von Stumberg and D. Cremers), In IEEE Robotics and Automation Letters (RA-L) & International Conference on Robotics and Automation (ICRA), volume 7, 2022
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry (N. Yang, L. von Stumberg, R. Wang and D. Cremers), In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
4Seasons: Benchmarking Visual SLAM and Long-Term Localization for Autonomous Driving in Challenging Conditions (P Wenzel, N Yang, R Wang, N Zeller and D Cremers), In arXiv preprint arXiv:2301.01147, 2022.
4.西班牙萨拉戈萨大学机器人、感知与实时组SLAM实验室
研究方向:视觉 SLAM、物体 SLAM、非刚性 SLAM、机器人、增强现实
实验室主页:http://robots.unizar.es/slamlab/
发表论文汇总:J.M. Martínez Montiel - Google 学术搜索
5.浙江大学 CAD&CG 国家重点实验室(不怎么更新)
研究方向:SFM/SLAM,三维重建,增强现实
实验室主页: http://www.zjucvg.net/
Github 代码地址:https://github.com/zju3dv
Computer Vision Group - Dataset Download (tum.de)
6.美国卡耐基梅陇大学机器人研究所
研究方向:机器人感知、结构,服务型、运输、制造业、现场机器
研究所主页: https://www.ri.cmu.edu/
发表论文:https://www.ri.cmu.edu/pubs/
Michael Kaess Michael Kaess - Google 学术搜索
Sebastian Scherer Sebastian Scherer - The Robotics Institute - CMU
Hsiao M, Westman E, Zhang G, et al. Keyframe-based dense planar SLAM[C]//2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017: 5110-5117.
7.美国明尼苏达大学多元自主机器人系统实验室
研究方向:视觉、激光、惯性导航系统,移动设备大规模三维建模与定位
实验室主页:UMN - MARS Lab
发表论文汇总:UMN - MARS Lab
语义数据关联:Liu X, Chen S W, Liu C, et al. Monocular Camera Based Fruit Counting and Mapping with Semantic Data Association[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2296-2303.
8.美国特拉华大学机器人感知与导航组
研究方向:SLAM、VINS、语义定位与建图等
实验室主页:https://sites.udel.edu/robot/
发表论文汇总: https://sites.udel.edu/robot/publications/
Github 地址: https://github.com/rpng?page=2
Chuchu Chen, Yulin Yang, Patrick Geneva, Guoquan Huang, "FEJ2: A Consistent Visual-Inertial State Estimator Design," In International Conference on Robotics and Automation (ICRA), 2022, Philadelphia, USA.
Geneva P, Eckenhoff K, Lee W, et al. Openvins: A research platform for visual-inertial estimation[C]//IROS 2019 Workshop on Visual-Inertial Navigation: Challenges and Applications, Macau, China. IROS 2019.(代码:https://github.com/rpng/open_vins )
Guoquan (Paul) Huang Guoquan (Paul) Huang (udel.edu)
动态SLAM领域
DynaSLAM II: Tightly-Coupled Multi-Object Tracking and SLAM | IEEE Journals & Magazine | IEEE Xplore
DOT: Dynamic Object Tracking for Visual SLAM | IEEE Conference Publication | IEEE Xplore
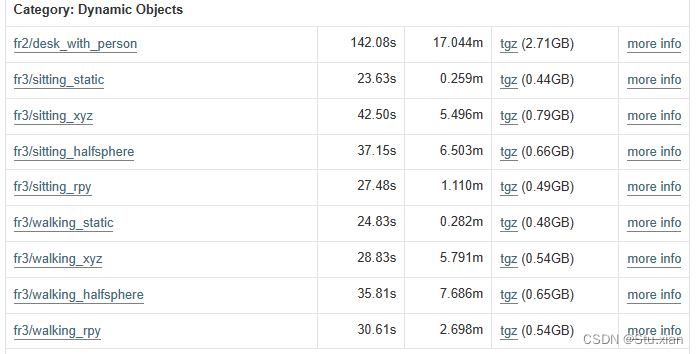
动态环境下的SLAM:数据集
目前评价动态环境下的SLAM系统数据集,最常用的也是大家基本上都会去比较的是TUM-RGBD的dynamic objects分类下的9个序列。
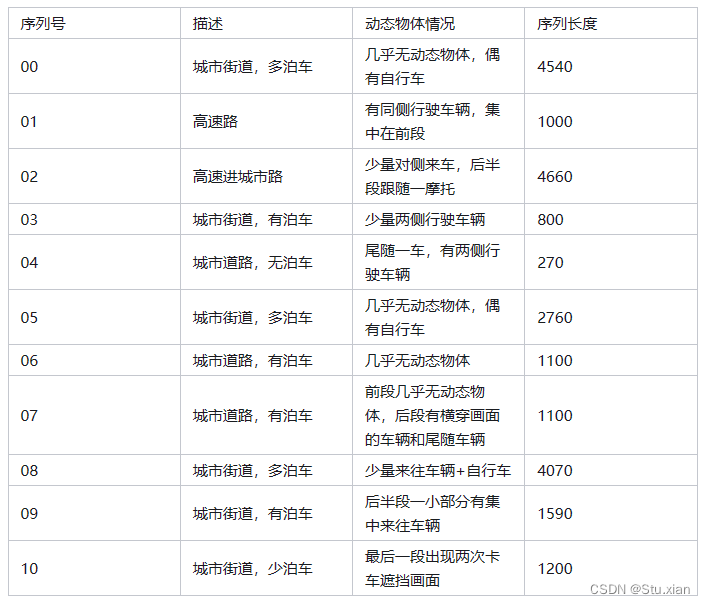
kitti odometry数据集序列:
参考:















 642
642











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









