







按照官网NVIDIA Isaac ROS-Getting Started说明进行安装
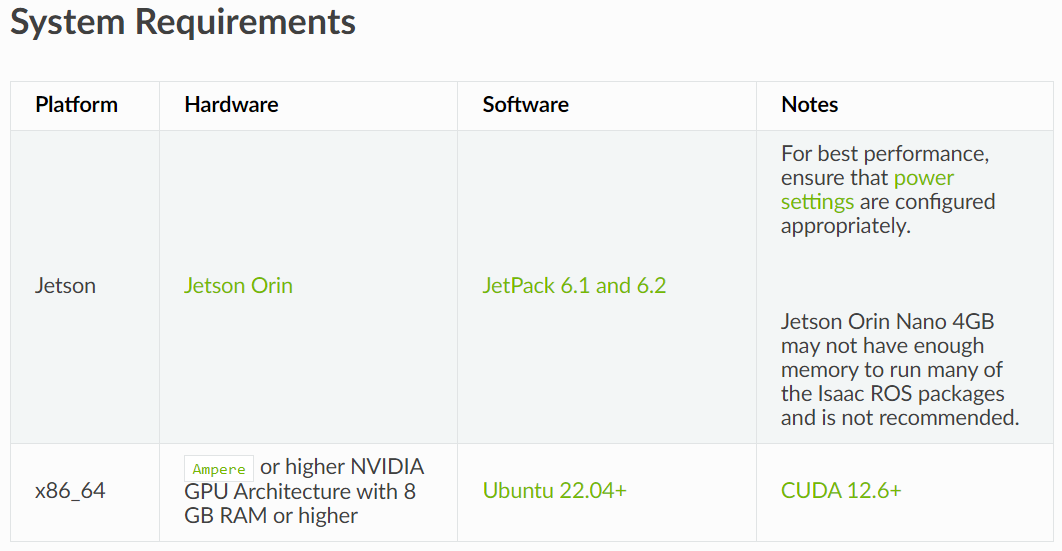
首先,明确系统需求。
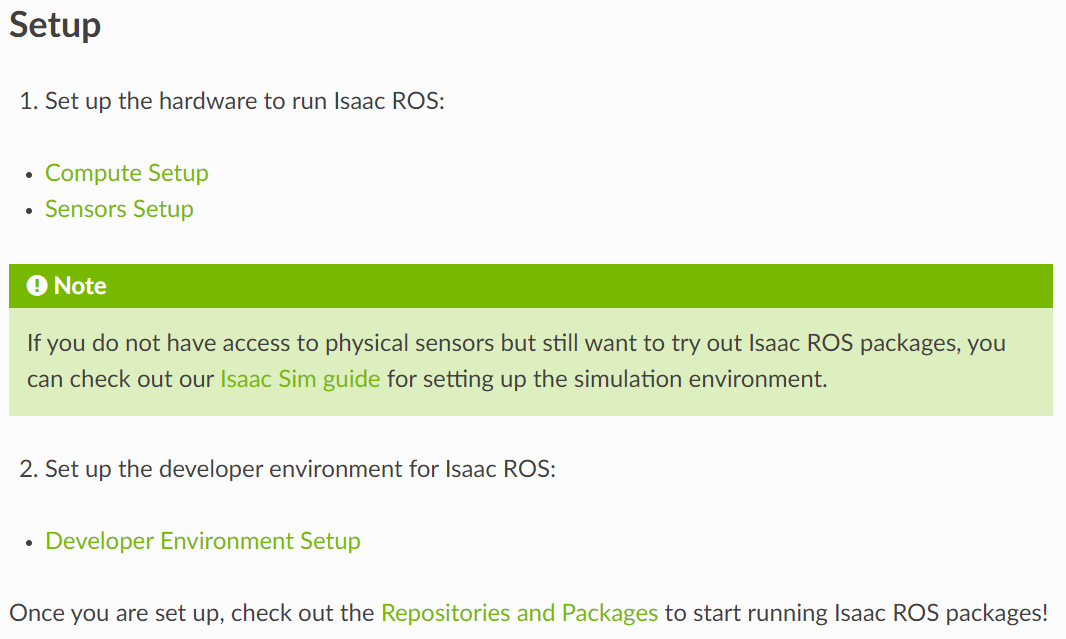
紧接着,按照官网安装步骤进行安装。
目录
Sensors Setup-Isaac ROS RealSense Setup
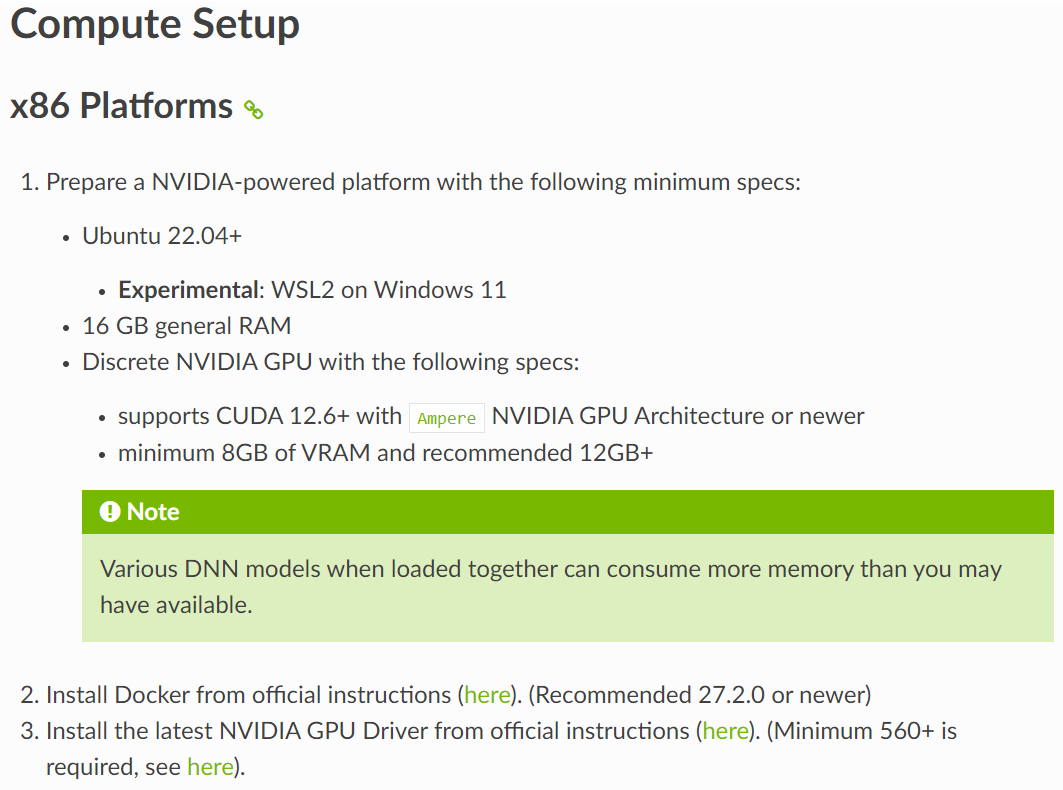
Compute Setup
本机为Ubuntu22.04.05系统
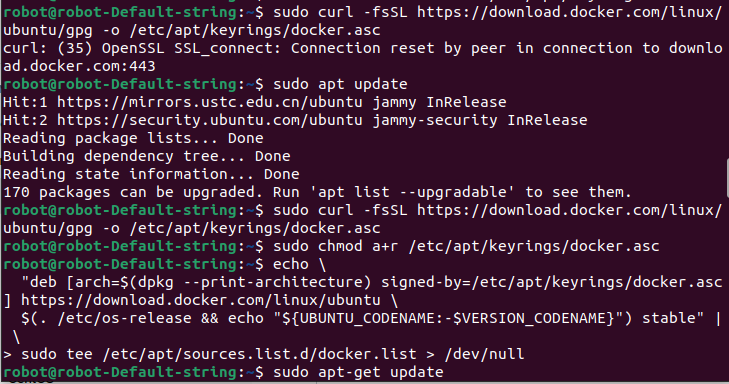
1. Docker安装过程参考官网指引
安装过程出现问题:
在根据官方指引安装Docker过程中,在执行sudo curl -fsSL https://download.docker.com/linux/ubuntu/gpg -o /etc/apt/keyrings/docker.asc时出现curl: (35) OpenSSL SSL_connect: Connection reset by peer in connection to download.docker.com:443的问题,可以通过sudo apt update得到解决
在执行sudo docker run hello-world时出现Unable to find image 'hello-world:latest' locally
docker: Error response from daemon: Get "https://registry-1.docker.io/v2/": context deadline exceeded错误

通过以下方法进行解决,首先,配置镜像加速器,通过 tee 命令生成 Docker 配置文件
sudo tee /etc/docker/daemon.json <<-'EOF'
{
"registry-mirrors": [
"https://do.nark.eu.org",
"https://dc.j8.work",
"https://docker.m.daocloud.io",
"https://dockerproxy.com",
"https://docker.mirrors.ustc.edu.cn",
"https://docker.nju.edu.cn"
]
}
EOF
配置完成后需重启 Docker 服务生效
sudo systemctl daemon-reload
sudo systemctl restart docker 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 596
596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











