 NVIDIA Isaac平台及Isaac Sim、ROS功能体验
NVIDIA Isaac平台及Isaac Sim、ROS功能体验





在现代机器人技术的发展中,仿真和实时计算是两个至关重要的环节。NVIDIA Isaac平台通过其强大的仿真工具Isaac Sim和高效的ROS集成Isaac ROS,为机器人开发者提供了一个全面的解决方案。本文是体验过该平台后的简单概述,包括NVIDIA Isaac平台的核心组件,特别是Isaac Sim和Isaac ROS,并通过代码实例展示其强大的功能和应用场景。
NVIDIA Isaac平台概述

1.1 NVIDIA Isaac的功能与优势
NVIDIA Isaac平台是一个专为机器人和人工智能(AI)打造的加速平台,旨在为开发者提供一个全面的工具集,以加速机器人相关应用的开发和部署。Isaac平台的核心功能和优势主要体现在以下几个方面:
高性能算法
NVIDIA Isaac平台集成了多种高性能算法,这些算法经过优化,能够在NVIDIA的GPU上高效运行。无论是机器人导航、路径规划,还是复杂的计算机视觉任务,Isaac平台都能提供强大的计算支持,确保实时性和准确性。
模块化应用框架
Isaac平台采用了模块化的设计理念,开发者可以根据需求灵活选择和组合不同的模块。这种设计不仅提高了开发的灵活性,还大大缩短了开发周期,使得开发者能够更快地将创意转化为实际应用。
强大的仿真工具
基于NVIDIA Omniverse平台构建的Isaac Sim,为开发者提供了一个高度逼真的仿真环境。在这个环境中,开发者可以在虚拟世界中测试和优化机器人算法,而无需担心物理硬件的限制。这不仅降低了开发成本,还提高了开发效率。
跨平台支持
NVIDIA Isaac平台支持多种操作系统和硬件平台,包括Linux、Windows以及NVIDIA自家的Jetson系列嵌入式设备。这种跨平台支持使得开发者可以在不同的硬件环境中无缝切换,极大地扩展了平台的应用范围。
丰富的开发者资源
NVIDIA为Isaac平台提供了丰富的开发者资源,包括详细的文档、示例代码、教程视频等。此外,NVIDIA还通过开发者社区和论坛,为开发者提供了一个交流和学习的平台,帮助他们更快地上手和解决问题。
1.2 NVIDIA Isaac的应用场景
NVIDIA Isaac平台广泛应用于多个领域,以下是几个典型的应用场景:
工业自动化
在工业自动化领域,NVIDIA Isaac平台被用于开发和部署各种智能机器人。这些机器人能够执行复杂的任务,如装配、焊接、搬运等,极大地提高了生产效率和质量。
物流和仓储
在物流和仓储行业,Isaac平台被用于开发智能仓储机器人和自动导引车(AGV)。这些机器人能够在复杂的仓库环境中自主导航和搬运货物,显著提升了物流效率。
医疗保健
在医疗保健领域,Isaac平台被用于开发手术机器人和护理机器人。这些机器人能够辅助医生进行精确的手术操作,或在医院中执行护理任务,减轻医护人员的工作负担。
农业
在农业领域,Isaac平台被用于开发智能农业机器人。这些机器人能够执行播种、施肥、喷洒农药等任务,帮助农民提高农业生产效率,减少人力成本。
教育和研究
在教育和研究领域,Isaac平台被用于开发教学机器人和科研平台。这些平台能够帮助学生和研究人员进行机器人和人工智能相关的实验和研究,推动相关领域的发展。
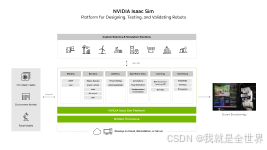
1.3 NVIDIA Isaac的主要组件
NVIDIA Isaac平台由多个核心组件构成,每个组件都扮演着重要的角色,共同构成了一个完整的开发和部署环境。以下是几个主要组件的介绍:
Isaac SDK
Isaac SDK是NVIDIA Isaac平台的核心组件,提供了丰富的API和工具,帮助开发者快速构建和部署机器人应用。SDK包含了多种预训练模型、算法库和开发工具,开发者可以根据需求进行选择和定制。
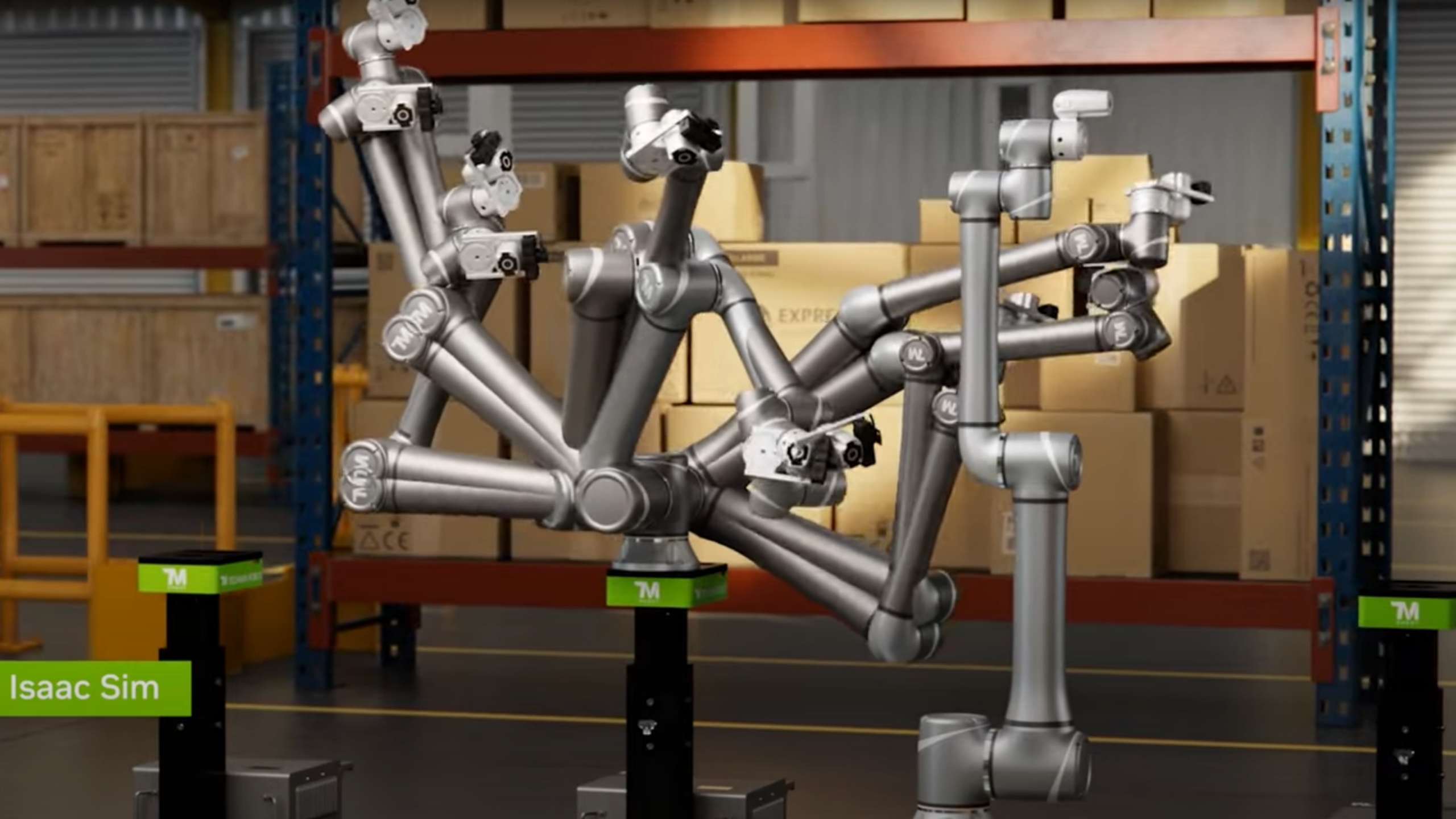
Isaac Sim
Isaac Sim是基于NVIDIA Omniverse平台构建的仿真工具,提供了高度逼真的虚拟环境,用于测试和优化机器人算法。Isaac Sim支持多种机器人模型和传感器模拟,开发者可以在虚拟环境中进行各种实验和测试。
Isaac ROS
Isaac ROS是NVIDIA Isaac平台与ROS(机器人操作系统)的集成组件,提供了ROS与NVIDIA硬件的高效连接和通信。通过Isaac ROS,开发者可以在ROS环境中使用NVIDIA的高性能计算资源,加速机器人应用的开发和部署。
Isaac GEMs
Isaac GEMs是NVIDIA Isaac平台提供的预训练模型和算法库,涵盖了机器人导航、路径规划、计算机视觉等多个领域。这些GEMs经过优化,能够在NVIDIA的GPU上高效运行,开发者可以直接使用或进行二次开发。
Isaac Fleet
Isaac Fleet是NVIDIA Isaac平台的部署和管理工具,用于在实际环境中部署和管理多个机器人。Isaac Fleet提供了丰富的监控和管理功能,帮助开发者实时监控机器人的状态,并进行远程管理和控制。
通过这些核心组件的协同工作,NVIDIA Isaac平台为开发者提供了一个全面、高效的开发和部署环境,极大地加速了机器人和人工智能应用的开发和落地。
小结:NVIDIA Isaac平台凭借其高性能算法、模块化应用框架、强大的仿真工具、跨平台支持以及丰富的开发者资源,成为了机器人和人工智能领域的领先平台。其广泛的应用场景和强大的核心组件,为开发者提供了全面的支持,助力他们在各个领域实现创新和突破。 ## NVIDIA Isaac Sim仿真工具
2.1 Isaac Sim的功能与特点
NVIDIA Isaac Sim™ 是一款强大的仿真工具,专为机器人开发者和研究人员设计,旨在提供一个基于物理的虚拟环境,用于设计、模拟、测试和训练基于AI的机器人和自主机器。Isaac Sim 不仅仅是一个仿真平台,它是一个集成了多种先进技术的综合解决方案,以下是其主要功能与特点:
1. 基于物理的仿真
Isaac Sim 提供了一个高度精确的物理仿真环境,能够模拟现实世界中的物理现象,如重力、摩擦力、碰撞等。这使得开发者可以在虚拟环境中进行复杂的机器人操作和环境交互测试,而无需担心物理硬件的损坏或高昂的实验成本。
2. 生成式AI集成
Isaac Sim 集成了生成式AI技术,允许开发者利用AI生成复杂的场景和环境。这不仅加速了数据集的生成,还使得机器人能够在多样化的虚拟环境中进行训练,从而提高其在现实世界中的适应性和鲁棒性。
3. 模块化设计
Isaac Sim 采用了模块化设计,使得开发者可以根据项目需求灵活选择和组合不同的模块。无论是机器人导航、路径规划,还是复杂的操作任务,Isaac Sim 都能提供相应的工具和接口,帮助开发者快速构建和测试机器人系统。
4. 高性能计算支持
Isaac Sim 经过优化,能够在NVIDIA的高性能计算平台上运行,如NVIDIA DGX™ 和 NVIDIA OVX™。这些平台提供了强大的计算能力和图形处理能力,使得Isaac Sim 能够处理大规模的仿真任务,并实时渲染复杂的3D场景。
5. 与ROS2的无缝集成

Isaac Sim 基于开源的ROS2(机器人操作系统)框架构建,这意味着ROS社区中的数百万开发者可以轻松利用NVIDIA的加速库和AI模型来加速其AI机器人开发和部署工作流程。这种集成不仅简化了开发流程,还促进了社区内的知识共享和技术交流。
2.2 Isaac Sim的应用场景
NVIDIA Isaac Sim 的应用场景非常广泛,涵盖了从工业自动化到教育培训等多个领域。以下是一些典型的应用场景:
1. 工业自动化
在工业自动化领域,Isaac Sim 可以用于模拟和优化复杂的生产线和物流系统。例如,自主移动机器人(AMR)可以在虚拟环境中进行路径规划和导航测试,确保其在实际部署时的安全性和效率。
2. 机器人操作和操纵
对于需要精确操作的机器人任务,如机械臂的装配和拆卸,Isaac Sim 提供了一个安全且可控的测试环境。开发者可以在虚拟环境中反复训练机器人的操作技能,直到达到预期的精度。
3. 计算机视觉和感知研究
Isaac Sim 可以生成大量的虚拟数据集,用于训练和测试计算机视觉算法。这对于开发能够感知和理解复杂环境的机器人至关重要。通过在虚拟环境中进行训练,机器人可以在现实世界中更好地识别和处理各种视觉信息。
4. 机器人教育和培训
在教育和培训领域,Isaac Sim 提供了一个交互式的学习平台,学生和研究人员可以在虚拟环境中进行机器人编程和仿真实验。这不仅降低了实验成本,还提高了学习效率。
2.3 Isaac Sim的最新更新
NVIDIA 不断更新和优化 Isaac Sim,以保持其在机器人仿真领域的领先地位。以下是一些最新的更新和改进:
1. 与Omniverse的集成
最新版本的Isaac Sim 集成了NVIDIA Omniverse™,这是一个开放的虚拟世界平台,允许开发者创建和共享复杂的3D场景。通过与Omniverse的集成,Isaac Sim 能够访问更多高质量的3D资产和场景,从而扩展了其仿真能力。
2. 增强的物理仿真功能
Isaac Sim 的物理仿真功能得到了进一步增强,支持更多的物理属性和仿真场景。开发者可以在仿真环境中模拟更加复杂的物理现象,如软体碰撞、流体动力学等,从而提升仿真的真实性和准确性。
3. 新的传感器仿真选项
Isaac Sim 新增了多种传感器仿真选项,包括高精度的激光雷达仿真和多光谱传感器仿真。这些新增的传感器仿真选项为开发者提供了更多的选择,帮助他们在仿真环境中测试和优化各种传感器配置。
4. 改进的ROS2支持
Isaac Sim 对 ROS2 的支持得到了显著改进,开发者可以更轻松地将 Isaac Sim 与 ROS2 集成,构建复杂的机器人控制和仿真工作流。新增的自定义 ROS2 消息支持,使得开发者可以更灵活地控制仿真步骤,满足各种复杂的仿真需求。
5. 社区和生态系统的扩展
NVIDIA 不断扩展 Isaac Sim 的社区和生态系统,提供了更多的开发者资源和支持。开发者可以通过 NVIDIA 论坛、技术博客和社区活动,获取最新的技术资讯和开发经验,加速机器人应用的开发和部署。
通过以上介绍,我们可以看到 NVIDIA Isaac Sim 作为一个强大的仿真工具,为机器人开发者提供了丰富的功能和广泛的应用场景。无论是机器人设计、自主机器训练,还是计算机视觉和感知研究,Isaac Sim 都能提供高度真实的仿真环境,帮助开发者加速机器人应用的开发和部署。随着最新更新的发布,Isaac Sim 的性能和易用性得到了进一步提升,为机器人技术的进一步发展奠定了坚实的基础。 ## NVIDIA Isaac的开发环境
在探索NVIDIA Isaac平台的强大功能时,了解其开发环境是至关重要的。NVIDIA Isaac不仅提供了一系列先进的仿真工具,还为开发者构建了一个全面的开发环境,包括NVIDIA Isaac实验室、NVIDIA加速系统以及丰富的开发者资源与支持。这些组件共同构成了一个高效、灵活且易于扩展的开发平台,帮助开发者快速实现机器人和AI应用的创新。
3.1 NVIDIA Isaac实验室
NVIDIA Isaac实验室是一个专为机器人学习设计的开源模块化框架,旨在打破传统训练方法的局限性,提供高保真仿真环境和丰富的物理AI功能。Isaac Lab的核心在于其模块化设计,使得开发者可以根据不同的训练需求灵活配置和扩展功能。
强化学习与模仿学习
Isaac Lab支持两种主要的机器人学习方法:强化学习(RL)和模仿学习(IL)。强化学习通过试错机制让机器人在不断尝试中学习,适用于需要高度适应性的任务。而模仿学习则通过模仿人类演示来学习特定任务,这种方法需要的训练数据较少,且能充分利用人类的专业知识。
- 强化学习:Isaac Lab通过封装不同程序库的接口,将环境数据转换为函数参数和返回类型,从而支持强化学习。这种方法使得机器人能够在尝试和错误中学习,逐步适应新情况。
- 模仿学习:由Robomimic框架提供支持,模仿学习能够以HDF5格式保存数据,使得机器人能够快速学习特定动作或行为。
模块化高保真仿真
Isaac Lab的仿真环境具有高保真特性,能够提供逼真的物理仿真效果。其仿真环境支持多种训练场景,包括但不限于:
- 人形机器人:如傅利叶智能的GR1人形机器人,通过Isaac Lab进行训练,能够模拟类似人类的自由度。
- 外科手术机器人:ORBIT-Surgical框架基于Isaac Lab,训练的达芬奇研究套件(dVRK)等机器人能够协助外科医生,减轻他们的脑力劳动负担。
平铺渲染与多GPU支持
Isaac Lab还提供了平铺渲染功能,能够将多个摄像头输入的图像合并成一张大图像,从而缩短渲染时间。这对于需要高精度视觉数据的训练任务尤为重要。此外,Isaac Lab支持多GPU和多节点扩展,通过PyTorch分布式框架,开发者可以在多个GPU上扩大训练规模,适用于复杂的强化学习环境。
3.2 NVIDIA加速系统
NVIDIA加速系统是NVIDIA Isaac平台的重要组成部分,旨在为机器人和AI应用提供高性能计算支持。这些系统包括但不限于:
- NVIDIA GPU:如Tesla、Quadro和RTX系列,提供强大的计算能力和图形处理能力,适用于各种AI和仿真任务。
- NVIDIA DGX系统:专为深度学习和AI训练设计的高性能计算平台,提供优化的硬件和软件环境。
- NVIDIA vGPU:虚拟GPU技术,使得多个用户可以共享物理GPU资源,提高资源利用率。
高性能计算与加速计算
NVIDIA加速系统通过高性能计算(HPC)和加速计算(Accelerated Computing)技术,为机器人学习和仿真提供强大的计算支持。这些技术包括:
- CUDA:NVIDIA的并行计算平台和编程模型,使得开发者能够利用GPU的强大计算能力进行并行计算。
- TensorRT:高性能深度学习推理库,优化深度学习模型的推理性能,适用于实时应用。
- Mellanox:提供高速网络解决方案,支持InfiniBand(IB)和以太网技术,提高数据传输速度和系统整体性能。
3.3 开发者资源与支持
NVIDIA为开发者提供了丰富的资源和支持,帮助他们更好地利用NVIDIA Isaac平台进行机器人和AI应用的开发。
开发者工具与SDK
NVIDIA提供了多种开发者工具和SDK,包括:
- NVIDIA Isaac SDK:提供了一系列工具和库,帮助开发者快速构建和部署机器人应用。
- NVIDIA Omniverse:一个开放的3D设计协作平台,支持高保真仿真和实时协作,适用于机器人和AI应用。
- NVIDIA Deep Learning Institute(DLI):提供AI和深度学习培训课程,帮助开发者提升技能。
4.1 机器人导航和路径规划
在机器人导航和路径规划领域,NVIDIA Isaac平台展现了其强大的计算能力和高效的算法支持。通过Isaac Sim的仿真环境,开发者可以在虚拟世界中测试和优化机器人的导航算法。
具体应用
- 仓库自动化:在仓库环境中,机器人需要高效地导航和规划路径以完成货物搬运任务。NVIDIA Isaac平台提供了高精度的地图生成和路径规划工具,帮助机器人避开障碍物,优化路径,提高工作效率。
- 无人驾驶:在无人驾驶领域,NVIDIA Isaac平台可以模拟各种复杂的交通场景,帮助开发者测试和优化自动驾驶车辆的导航和路径规划算法。
技术细节
- SLAM技术:NVIDIA Isaac支持同步定位与地图构建(SLAM)技术,帮助机器人在未知环境中进行定位和地图构建。
- 路径规划算法:平台内置多种路径规划算法,如A*算法、Dijkstra算法等,开发者可以根据具体需求选择合适的算法进行优化。
4.2 机器人操作和操纵
机器人操作和操纵是机器人技术中的另一个重要领域。NVIDIA Isaac平台通过其强大的仿真工具和算法支持,帮助开发者实现复杂的机器人操作任务。
具体应用
- 工业机器人:在工业生产线上,机器人需要完成各种复杂的操作任务,如焊接、装配、搬运等。NVIDIA Isaac平台可以模拟这些操作任务,帮助开发者优化机器人的操作算法,提高生产效率。
- 医疗机器人:在医疗领域,机器人需要完成精细的操作任务,如手术、药物分发等。NVIDIA Isaac平台提供了高精度的仿真环境,帮助开发者测试和优化医疗机器人的操作算法。
技术细节
- 运动规划:NVIDIA Isaac支持多种运动规划算法,如RRT(快速随机树)算法、PRM(概率路线图)算法等,帮助机器人实现复杂的运动规划。
- 力反馈控制:平台支持力反馈控制技术,帮助机器人实现精细的操作任务。
4.3 计算机视觉和感知研究
计算机视觉和感知研究是机器人技术中的核心领域之一。NVIDIA Isaac平台通过其强大的计算能力和丰富的算法库,帮助开发者实现高效的计算机视觉和感知研究。
具体应用
- 目标检测:在机器人导航和操作中,目标检测是一个关键任务。NVIDIA Isaac平台提供了多种目标检测算法,如YOLO、SSD等,帮助机器人实现高效的目标检测。
- 场景理解:在复杂的环境中,机器人需要理解场景中的各种信息,如障碍物、行人、车辆等。NVIDIA Isaac平台提供了丰富的场景理解工具,帮助机器人实现高效的场景理解。
技术细节
- 深度学习模型:NVIDIA Isaac支持多种深度学习模型,如卷积神经网络(CNN)、循环神经网络(RNN)等,帮助开发者实现高效的计算机视觉和感知研究。
- 数据增强:平台支持数据增强技术,帮助开发者生成更多的训练数据,提高模型的泛化能力。
4.4 数据集生成
数据集生成是机器人技术中的一个重要环节。NVIDIA Isaac平台通过其强大的仿真工具,帮助开发者生成高质量的数据集,用于训练和测试机器人算法。
具体应用
- 训练数据生成:在机器人导航和操作中,训练数据的质量直接影响算法的性能。NVIDIA Isaac平台可以生成各种复杂的场景数据,帮助开发者生成高质量的训练数据。
- 测试数据生成:在算法测试中,测试数据的质量同样重要。NVIDIA Isaac平台可以生成各种复杂的测试数据,帮助开发者测试和优化机器人算法。
技术细节
- 场景生成:NVIDIA Isaac支持多种场景生成工具,如随机场景生成、特定场景生成等,帮助开发者生成各种复杂的场景数据。
- 数据标注:平台支持数据标注工具,帮助开发者对生成的数据进行标注,提高数据的质量。
4.5 机器人教育和培训
机器人教育和培训是机器人技术中的一个重要领域。NVIDIA Isaac平台通过其强大的仿真工具和丰富的教学资源,帮助教育机构和培训机构实现高效的机器人教育和培训。
具体应用
- 教育机构:在教育机构中,NVIDIA Isaac平台可以作为教学工具,帮助学生学习和理解机器人技术。平台提供了丰富的教学资源,如教程、案例、实验等,帮助学生掌握机器人技术的核心知识。
- 培训机构:在培训机构中,NVIDIA Isaac平台可以作为培训工具,帮助学员学习和掌握机器人技术。平台提供了丰富的培训资源,如课程、实验、项目等,帮助学员提高机器人技术的实践能力。
技术细节
- 虚拟实验室:NVIDIA Isaac支持虚拟实验室功能,帮助教育机构和培训机构实现高效的机器人教育和培训。
- 教学资源:平台提供了丰富的教学资源,如教程、案例、实验等,帮助学生和学员学习和掌握机器人技术。
通过以上应用案例,我们可以看到NVIDIA Isaac平台在机器人技术中的广泛应用和强大功能。无论是机器人导航和路径规划,还是机器人操作和操纵,无论是计算机视觉和感知研究,还是数据集生成和机器人教育,NVIDIA Isaac都提供了强大的工具和算法,加速了机器人技术的发展和应用。 ## NVIDIA Isaac的未来发展
5.1 与Omniverse的集成
NVIDIA Isaac平台正朝着与NVIDIA Omniverse的深度集成迈进,这一集成将为机器人开发者带来前所未有的仿真和协作能力。Omniverse是一个基于物理的实时仿真平台,它允许开发者在高度逼真的虚拟环境中进行机器人设计和测试。通过与Omniverse的集成,Isaac平台将能够利用Omniverse的强大功能,包括RTX光线追踪、PhysX物理引擎和多用户协作工具,从而为机器人开发者提供一个更加真实和高效的仿真环境。
Omniverse的核心优势
- 实时协作:Omniverse支持多用户实时协作,这意味着团队成员可以在同一个虚拟环境中同时工作,极大地提高了开发效率。
- 高保真渲染:借助NVIDIA的RTX技术,Omniverse能够提供高保真度的实时渲染,使得仿真环境更加逼真。
- 跨平台兼容:Omniverse支持多种文件格式和工具的集成,使得Isaac平台能够无缝对接其他设计工具和仿真环境。
集成带来的新功能
- 数字孪生:通过与Omniverse的集成,Isaac平台可以创建机器人的数字孪生模型,实现物理机器人与虚拟模型的同步运行和调试。
- 复杂场景仿真:Omniverse的强大渲染能力和物理引擎使得Isaac平台能够模拟更加复杂的场景,如动态天气变化、光照条件变化等。
- 多传感器数据融合:集成Omniverse后,Isaac平台可以更好地模拟多传感器数据,如RGB-D相机、激光雷达等,提供更加丰富的仿真数据。
大规模仿真中的GPU加速:性能提升与关键应用场景
大规模仿真中的GPU加速:性能提升与关键应用场景
在现代计算领域,GPU(图形处理单元)已经从单纯的图形渲染工具演变为强大的计算引擎,广泛应用于各种高性能计算任务中。特别是在大规模仿真领域,GPU的并行处理能力为科研人员和工程师提供了前所未有的效率提升。本文将深入探讨GPU加速在大规模仿真中的性能提升,并通过对比GPU与CPU的性能、分析GPU加速的具体效果以及实际案例,展示GPU在仿真领域的巨大潜力。
GPU与CPU的性能对比
在讨论GPU加速之前,我们首先需要了解GPU与CPU在性能上的差异。CPU(中央处理单元)作为传统的计算核心,其设计初衷是为了处理通用计算任务,具有较强的单线程性能和复杂的控制逻辑。然而,面对大规模仿真中的高度并行化任务,CPU的性能就显得捉襟见肘。
相比之下,GPU的设计更加专注于并行计算。GPU拥有大量的核心(通常是CPU的数十倍甚至上百倍),这些核心可以同时处理多个任务,从而在并行计算任务中展现出惊人的性能。GPU的核心虽然单个性能不如CPU,但其庞大的数量使得整体性能远超CPU。
为了更直观地展示GPU与CPU的性能差异,我们来看一组数据:
-
CPU:假设一个典型的CPU拥有8个核心,每个核心的时钟频率为3.5 GHz,那么其理论峰值性能为:
[
8 \text{核心} \times 3.5 \text{GHz} \times 2 \text{(双精度浮点运算)} = 56 \text{GFLOPS}
] -
GPU:以NVIDIA的A100 GPU为例,其拥有6912个CUDA核心,每个核心的时钟频率为1.41 GHz,那么其理论峰值性能为:
[
6912 \text{核心} \times 1.41 \text{GHz} \times 2 \text{(双精度浮点运算)} = 19.6 \text{TFLOPS}
]
从数据中可以看出,GPU的理论峰值性能是CPU的数百倍。这种巨大的性能差异使得GPU在大规模仿真中具有无可比拟的优势。
GPU加速的具体效果
GPU加速在大规模仿真中的具体效果如何?我们可以通过以下几个方面来详细分析:
-
计算速度的提升:在大规模仿真中,计算速度的提升是最直接的效果。由于GPU的并行计算能力,许多原本需要数小时甚至数天的计算任务可以在几分钟内完成。例如,在分子动力学模拟中,使用GPU加速可以将模拟时间从数天缩短到数小时,极大地提高了科研效率。
-
内存带宽的优化:GPU不仅在计算速度上具有优势,其内存带宽也远超CPU。GPU通常配备有高速的GDDR6或HBM2内存,其带宽可以达到数百GB/s,而CPU的内存带宽通常在数十GB/s。这种高带宽使得GPU在处理大规模数据集时更加游刃有余。
-
能效比的提升:除了性能的提升,GPU在能效比上也具有显著优势。由于GPU的核心数量众多,其单位功耗下的计算性能远高于CPU。这意味着在相同的功耗下,GPU可以完成更多的计算任务,从而降低了整体的能耗成本。
实际案例分析
为了更直观地展示GPU加速在大规模仿真中的效果,我们来看几个实际案例:
-
天气预报模拟:天气预报模拟是一个典型的大规模仿真任务,需要处理大量的气象数据并进行复杂的数值计算。传统的CPU计算需要数小时才能完成一次模拟,而使用GPU加速后,模拟时间可以缩短到数十分钟。这不仅提高了预报的实时性,还为气象学家提供了更多的分析时间。
-
流体力学模拟:在流体力学领域,GPU加速同样表现出色。例如,在汽车空气动力学模拟中,使用GPU加速可以将原本需要数天的计算时间缩短到数小时,从而加快了汽车设计的迭代速度。
-
量子化学计算:量子化学计算是另一个受益于GPU加速的领域。在分子轨道计算中,使用GPU加速可以将计算时间从数天缩短到数小时,从而为化学家提供了更多的实验设计时间。
GPU加速的关键应用场景
在现代计算领域,GPU加速在多个关键应用场景中都展现出了强大的潜力。以下是GPU加速在多个关键应用场景中的具体表现:
-
大规模并行计算:GPU在大规模并行计算中的应用尤为突出。由于GPU拥有数千个处理核心,能够同时处理大量数据,这使得它在需要高度并行化的任务中表现出色。例如,在天气预报、气候模拟和分子动力学模拟中,GPU能够显著加速计算过程,提供更快速的结果。
-
图形渲染与处理:图形渲染是GPU的传统强项。现代游戏、电影特效和虚拟现实(VR)应用都需要高质量的图形渲染。GPU通过其强大的并行处理能力,能够在短时间内生成复杂的3D图像,提供流畅的用户体验。此外,GPU还在图像处理软件中广泛应用,如Adobe Photoshop和GIMP,加速图像的滤镜处理和编辑操作。
-
科学计算与仿真:科学计算和仿真是GPU加速的另一个重要领域。在物理学、化学、生物学等科学研究中,研究人员经常需要进行复杂的数值模拟。GPU能够显著加速这些模拟过程,使得研究人员能够更快地获得实验结果。例如,在计算流体力学(CFD)中,GPU加速技术已经成为主流,能够为工程设计、科学研究等领域提供更强大的工具。
-
强化学习中的高仿真度与快速仿真:强化学习是一种通过试错来学习最优策略的机器学习方法。在强化学习中,高仿真度和快速仿真是关键。GPU通过其并行计算能力,能够快速模拟大量场景,帮助强化学习模型在短时间内进行大量试验,从而加速学习过程。例如,在自动驾驶和机器人控制领域,GPU加速的强化学习模型能够更快地学习和适应复杂环境。
-
物理模拟中的微观与宏观仿真:物理模拟涵盖了从微观粒子到宏观物体的广泛范围。在微观层面,GPU加速的分子动力学模拟能够帮助研究人员理解分子和原子的行为;在宏观层面,GPU加速的流体动力学和结构力学模拟能够帮助工程师设计更高效的机械和建筑结构。例如,在材料科学中,GPU加速的模拟能够帮助研究人员预测新材料的性能,加速新材料的研发过程。
-
流体仿真中的高分辨率与实时仿真:流体仿真是工程设计和科学研究中的重要工具。高分辨率和实时仿真是流体仿真的两大挑战。GPU通过其并行计算能力,能够在短时间内处理大量数据,提供高分辨率的流体仿真结果。例如,在汽车设计和航空航天领域,GPU加速的流体仿真能够帮助工程师优化设计,减少风阻和提高燃油效率。
-
计算机辅助工程(CAE)中的复杂物理模型仿真:计算机辅助工程(CAE)是工程设计中的重要工具,涵盖了结构分析、热分析、流体分析等多个方面。在CAE中,复杂的物理模型仿真是不可或缺的。GPU的并行计算能力使得这些复杂的仿真任务能够在短时间内完成,从而加速产品设计和优化过程。例如,在汽车碰撞仿真和结构力学分析中,GPU加速的CAE工具已经成为了工程师的得力助手。
-
MATLAB中的大规模数据处理与计算密集型任务:MATLAB是科学计算和工程设计中的常用工具。在处理大规模数据和计算密集型任务时,MATLAB的性能往往受到限制。通过利用GPU加速,MATLAB用户可以在更短的时间内完成复杂的计算任务,从而提高工作效率。例如,在信号处理、图像分析和机器学习等领域,GPU加速的MATLAB工具已经取得了显著的成果。
实际应用案例
通过以上分析,我们可以看到,GPU加速在多个关键应用场景中都展现出了强大的潜力。无论是大规模并行计算、图形渲染、科学计算,还是强化学习、物理模拟、流体仿真和CAE,GPU都能提供高效的计算支持,从而加速各个领域的发展。随着GPU技术的不断进步,我们有理由相信,GPU加速将在未来的计算领域中发挥越来越重要的作用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 509
509







 到【灌水乐园】发言
到【灌水乐园】发言









