







解决autoware1.14无法显示/bounding_boxes矩形框问题
参考文章:
版权声明:本文为CSDN博主「lu~yo」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_38861347/article/details/126103048
解决流程:
-
gedit ~/autoware.ai/src/autoware/core_perception/lidar_euclidean_cluster_detect/nodes/lidar_euclidean_cluster_detect/lidar_euclidean_cluster_detect.cpp -
里面的内容进行替换为如下的代码
#include <iostream> #include <vector> #include <string> #include <sstream> #include <limits> #include <cmath> #include <ros/ros.h> #include <pcl_conversions/pcl_conversions.h> #include <pcl/PCLPointCloud2.h> #include <pcl/conversions.h> #include <pcl_ros/transforms.h> #include <pcl_ros/point_cloud.h> #include <pcl/ModelCoefficients.h> #include <pcl/point_types.h> #include <pcl/filters/extract_indices.h> #include <pcl/filters/voxel_grid.h> #include <pcl/filters/conditional_removal.h> #include <pcl/features/normal_3d.h> #include <pcl/features/normal_3d_omp.h> #include <pcl/features/don.h> #include <pcl/features/fpfh_omp.h> #include <pcl/kdtree/kdtree.h> #include <pcl/sample_consensus/method_types.h> #include <pcl/sample_consensus/model_types.h> #include <pcl/segmentation/sac_segmentation.h> #include <pcl/segmentation/extract_clusters.h> #include <pcl/segmentation/conditional_euclidean_clustering.h> #include <pcl/common/common.h> #include <pcl/search/organized.h> #include <pcl/search/kdtree.h> #include <pcl/segmentation/extract_clusters.h> #include <std_msgs/Float32MultiArray.h> #include <std_msgs/MultiArrayLayout.h> #include <std_msgs/MultiArrayDimension.h> #include "autoware_msgs/Centroids.h" #include "autoware_msgs/CloudCluster.h" #include "autoware_msgs/CloudClusterArray.h" #include "autoware_msgs/DetectedObject.h" #include "autoware_msgs/DetectedObjectArray.h" #include <vector_map/vector_map.h> #include <tf/tf.h> #include <yaml-cpp/yaml.h> #include <opencv/cv.h> #include <opencv/highgui.h> #include <opencv2/core/version.hpp> #if (CV_MAJOR_VERSION == 3) #include "gencolors.cpp" #else #include <opencv2/contrib/contrib.hpp> #include <autoware_msgs/DetectedObjectArray.h> #endif #include "cluster.h" #include <jsk_recognition_msgs/BoundingBoxArray.h> #ifdef GPU_CLUSTERING #include "gpu_euclidean_clustering.h" #endif #define __APP_NAME__ "euclidean_clustering" using namespace cv; ros::Publisher pub_bounding_boxs_; ros::Publisher _pub_cluster_cloud; ros::Publisher _pub_ground_cloud; ros::Publisher _centroid_pub; ros::Publisher _pub_clusters_message; ros::Publisher _pub_points_lanes_cloud; ros::Publisher _pub_detected_objects; std_msgs::Header _velodyne_header; std::string _output_frame; static bool _velodyne_transform_available; static bool _downsample_cloud; static bool _pose_estimation; static double _leaf_size; static int _cluster_size_min; static int _cluster_size_max; static const double _initial_quat_w = 1.0; static bool _remove_ground; // only ground static bool _using_sensor_cloud; static bool _use_diffnormals; static double _clip_min_height; static double _clip_max_height; static bool _keep_lanes; static double _keep_lane_left_distance; static double _keep_lane_right_distance; static double _remove_points_upto; static double _cluster_merge_threshold; static double _clustering_distance; static bool _use_gpu; static std::chrono::system_clock::time_point _start, _end; std::vector<std::vector<geometry_msgs::Point>> _way_area_points; std::vector<cv::Scalar> _colors; pcl::PointCloud<pcl::PointXYZ> _sensor_cloud; visualization_msgs::Marker _visualization_marker; static bool _use_multiple_thres; std::vector<double> _clustering_distances; std::vector<double> _clustering_ranges; tf::StampedTransform *_transform; tf::StampedTransform *_velodyne_output_transform; tf::TransformListener *_transform_listener; tf::TransformListener *_vectormap_transform_listener; tf::StampedTransform findTransform(const std::string &in_target_frame, const std::string &in_source_frame) { tf::StampedTransform transform; try { // What time should we use? _vectormap_transform_listener->lookupTransform(in_target_frame, in_source_frame, ros::Time(0), transform); } catch (tf::TransformException ex) { ROS_ERROR("%s", ex.what()); return transform; } return transform; } geometry_msgs::Point transformPoint(const geometry_msgs::Point& point, const tf::Transform& tf) { tf::Point tf_point; tf::pointMsgToTF(point, tf_point); tf_point = tf * tf_point; geometry_msgs::Point ros_point; tf::pointTFToMsg(tf_point, ros_point); return ros_point; } void transformBoundingBox(const jsk_recognition_msgs::BoundingBox &in_boundingbox, jsk_recognition_msgs::BoundingBox &out_boundingbox, const std::string &in_target_frame, const std_msgs::Header &in_header) { geometry_msgs::PoseStamped pose_in, pose_out; pose_in.header = in_header; pose_in.pose = in_boundingbox.pose; try { _transform_listener->transformPose(in_target_frame, ros::Time(), pose_in, in_header.frame_id, pose_out); } catch (tf::TransformException &ex) { ROS_ERROR("transformBoundingBox: %s", ex.what()); } out_boundingbox.pose = pose_out.pose; out_boundingbox.header = in_header; out_boundingbox.header.frame_id = in_target_frame; out_boundingbox.dimensions = in_boundingbox.dimensions; out_boundingbox.value = in_boundingbox.value; out_boundingbox.label = in_boundingbox.label; } void publishDetectedObjects(const autoware_msgs::CloudClusterArray &in_clusters) { autoware_msgs::DetectedObjectArray detected_objects; detected_objects.header = in_clusters.header; for (size_t i = 0; i < in_clusters.clusters.size(); i++) { autoware_msgs::DetectedObject detected_object; detected_object.header = in_clusters.header; detected_object.label = "unknown"; detected_object.score = 1.; detected_object.space_frame = in_clusters.header.frame_id; detected_object.pose = in_clusters.clusters[i].bounding_box.pose; detected_object.dimensions = in_clusters.clusters[i].dimensions; detected_object.pointcloud = in_clusters.clusters[i].cloud; detected_object.convex_hull = in_clusters.clusters[i].convex_hull; detected_object.valid = true; detected_objects.objects.push_back(detected_object); } _pub_detected_objects.publish(detected_objects); } void publishCloudClusters(const ros::Publisher *in_publisher, const autoware_msgs::CloudClusterArray &in_clusters, const std::string &in_target_frame, const std_msgs::Header &in_header) { if (in_target_frame != in_header.frame_id) { autoware_msgs::CloudClusterArray clusters_transformed; clusters_transformed.header = in_header; clusters_transformed.header.frame_id = in_target_frame; for (auto i = in_clusters.clusters.begin(); i != in_clusters.clusters.end(); i++) { autoware_msgs::CloudCluster cluster_transformed; cluster_transformed.header = in_header; try { _transform_listener->lookupTransform(in_target_frame, _velodyne_header.frame_id, ros::Time(), *_transform); pcl_ros::transformPointCloud(in_target_frame, *_transform, i->cloud, cluster_transformed.cloud); _transform_listener->transformPoint(in_target_frame, ros::Time(), i->min_point, in_header.frame_id, cluster_transformed.min_point); _transform_listener->transformPoint(in_target_frame, ros::Time(), i->max_point, in_header.frame_id, cluster_transformed.max_point); _transform_listener->transformPoint(in_target_frame, ros::Time(), i->avg_point, in_header.frame_id, cluster_transformed.avg_point); _transform_listener->transformPoint(in_target_frame, ros::Time(), i->centroid_point, in_header.frame_id, cluster_transformed.centroid_point); cluster_transformed.dimensions = i->dimensions; cluster_transformed.eigen_values = i->eigen_values; cluster_transformed.eigen_vectors = i->eigen_vectors; cluster_transformed.convex_hull = i->convex_hull; cluster_transformed.bounding_box.pose.position = i->bounding_box.pose.position; if(_pose_estimation) { cluster_transformed.bounding_box.pose.orientation = i->bounding_box.pose.orientation; } else { cluster_transformed.bounding_box.pose.orientation.w = _initial_quat_w; } clusters_transformed.clusters.push_back(cluster_transformed); } catch (tf::TransformException &ex) { ROS_ERROR("publishCloudClusters: %s", ex.what()); } } in_publisher->publish(clusters_transformed); publishDetectedObjects(clusters_transformed); } else { in_publisher->publish(in_clusters); publishDetectedObjects(in_clusters); } } void publishCentroids(const ros::Publisher *in_publisher, const autoware_msgs::Centroids &in_centroids, const std::string &in_target_frame, const std_msgs::Header &in_header) { if (in_target_frame != in_header.frame_id) { autoware_msgs::Centroids centroids_transformed; centroids_transformed.header = in_header; centroids_transformed.header.frame_id = in_target_frame; for (auto i = centroids_transformed.points.begin(); i != centroids_transformed.points.end(); i++) { geometry_msgs::PointStamped centroid_in, centroid_out; centroid_in.header = in_header; centroid_in.point = *i; try { _transform_listener->transformPoint(in_target_frame, ros::Time(), centroid_in, in_header.frame_id, centroid_out); centroids_transformed.points.push_back(centroid_out.point); } catch (tf::TransformException &ex) { ROS_ERROR("publishCentroids: %s", ex.what()); } } in_publisher->publish(centroids_transformed); } else { in_publisher->publish(in_centroids); } } void publishCloud(const ros::Publisher *in_publisher, const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_to_publish_ptr) { sensor_msgs::PointCloud2 cloud_msg; pcl::toROSMsg(*in_cloud_to_publish_ptr, cloud_msg); cloud_msg.header = _velodyne_header; in_publisher->publish(cloud_msg); } void publishColorCloud(const ros::Publisher *in_publisher, const pcl::PointCloud<pcl::PointXYZRGB>::Ptr in_cloud_to_publish_ptr) { sensor_msgs::PointCloud2 cloud_msg; pcl::toROSMsg(*in_cloud_to_publish_ptr, cloud_msg); cloud_msg.header = _velodyne_header; in_publisher->publish(cloud_msg); } void keepLanePoints(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_cloud_ptr, float in_left_lane_threshold = 1.5, float in_right_lane_threshold = 1.5) { pcl::PointIndices::Ptr far_indices(new pcl::PointIndices); for (unsigned int i = 0; i < in_cloud_ptr->points.size(); i++) { pcl::PointXYZ current_point; current_point.x = in_cloud_ptr->points[i].x; current_point.y = in_cloud_ptr->points[i].y; current_point.z = in_cloud_ptr->points[i].z; if (current_point.y > (in_left_lane_threshold) || current_point.y < -1.0 * in_right_lane_threshold) { far_indices->indices.push_back(i); } } out_cloud_ptr->points.clear(); pcl::ExtractIndices<pcl::PointXYZ> extract; extract.setInputCloud(in_cloud_ptr); extract.setIndices(far_indices); extract.setNegative(true); // true removes the indices, false leaves only the indices extract.filter(*out_cloud_ptr); } #ifdef GPU_CLUSTERING std::vector<ClusterPtr> clusterAndColorGpu(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZRGB>::Ptr out_cloud_ptr, autoware_msgs::Centroids &in_out_centroids, double in_max_cluster_distance = 0.5) { std::vector<ClusterPtr> clusters; // Convert input point cloud to vectors of x, y, and z int size = in_cloud_ptr->points.size(); if (size == 0) return clusters; float *tmp_x, *tmp_y, *tmp_z; tmp_x = (float *) malloc(sizeof(float) * size); tmp_y = (float *) malloc(sizeof(float) * size); tmp_z = (float *) malloc(sizeof(float) * size); for (int i = 0; i < size; i++) { pcl::PointXYZ tmp_point = in_cloud_ptr->at(i); tmp_x[i] = tmp_point.x; tmp_y[i] = tmp_point.y; tmp_z[i] = tmp_point.z; } GpuEuclideanCluster gecl_cluster; gecl_cluster.setInputPoints(tmp_x, tmp_y, tmp_z, size); gecl_cluster.setThreshold(in_max_cluster_distance); gecl_cluster.setMinClusterPts(_cluster_size_min); gecl_cluster.setMaxClusterPts(_cluster_size_max); gecl_cluster.extractClusters(); std::vector<GpuEuclideanCluster::GClusterIndex> cluster_indices = gecl_cluster.getOutput(); unsigned int k = 0; for (auto it = cluster_indices.begin(); it != cluster_indices.end(); it++) { ClusterPtr cluster(new Cluster()); cluster->SetCloud(in_cloud_ptr, it->points_in_cluster, _velodyne_header, k, (int) _colors[k].val[0], (int) _colors[k].val[1], (int) _colors[k].val[2], "", _pose_estimation); clusters.push_back(cluster); k++; } free(tmp_x); free(tmp_y); free(tmp_z); return clusters; } #endif std::vector<ClusterPtr> clusterAndColor(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZRGB>::Ptr out_cloud_ptr, autoware_msgs::Centroids &in_out_centroids, double in_max_cluster_distance = 0.5) { pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>); // create 2d pc pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_2d(new pcl::PointCloud<pcl::PointXYZ>); pcl::copyPointCloud(*in_cloud_ptr, *cloud_2d); // make it flat for (size_t i = 0; i < cloud_2d->points.size(); i++) { cloud_2d->points[i].z = 0; } if (cloud_2d->points.size() > 0) tree->setInputCloud(cloud_2d); std::vector<pcl::PointIndices> cluster_indices; // perform clustering on 2d cloud pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec; ec.setClusterTolerance(in_max_cluster_distance); // ec.setMinClusterSize(_cluster_size_min); ec.setMaxClusterSize(_cluster_size_max); ec.setSearchMethod(tree); ec.setInputCloud(cloud_2d); ec.extract(cluster_indices); // use indices on 3d cloud / //--- 3. Color clustered points / unsigned int k = 0; // pcl::PointCloud<pcl::PointXYZRGB>::Ptr final_cluster (new pcl::PointCloud<pcl::PointXYZRGB>); std::vector<ClusterPtr> clusters; // pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_cluster (new pcl::PointCloud<pcl::PointXYZRGB>);//coord + color // cluster for (auto it = cluster_indices.begin(); it != cluster_indices.end(); ++it) { ClusterPtr cluster(new Cluster()); cluster->SetCloud(in_cloud_ptr, it->indices, _velodyne_header, k, (int) _colors[k].val[0], (int) _colors[k].val[1], (int) _colors[k].val[2], "", _pose_estimation); clusters.push_back(cluster); k++; } // std::cout << "Clusters: " << k << std::endl; return clusters; } void checkClusterMerge(size_t in_cluster_id, std::vector<ClusterPtr> &in_clusters, std::vector<bool> &in_out_visited_clusters, std::vector<size_t> &out_merge_indices, double in_merge_threshold) { // std::cout << "checkClusterMerge" << std::endl; pcl::PointXYZ point_a = in_clusters[in_cluster_id]->GetCentroid(); for (size_t i = 0; i < in_clusters.size(); i++) { if (i != in_cluster_id && !in_out_visited_clusters[i]) { pcl::PointXYZ point_b = in_clusters[i]->GetCentroid(); double distance = sqrt(pow(point_b.x - point_a.x, 2) + pow(point_b.y - point_a.y, 2)); if (distance <= in_merge_threshold) { in_out_visited_clusters[i] = true; out_merge_indices.push_back(i); // std::cout << "Merging " << in_cluster_id << " with " << i << " dist:" << distance << std::endl; checkClusterMerge(i, in_clusters, in_out_visited_clusters, out_merge_indices, in_merge_threshold); } } } } void mergeClusters(const std::vector<ClusterPtr> &in_clusters, std::vector<ClusterPtr> &out_clusters, std::vector<size_t> in_merge_indices, const size_t ¤t_index, std::vector<bool> &in_out_merged_clusters) { // std::cout << "mergeClusters:" << in_merge_indices.size() << std::endl; pcl::PointCloud<pcl::PointXYZRGB> sum_cloud; pcl::PointCloud<pcl::PointXYZ> mono_cloud; ClusterPtr merged_cluster(new Cluster()); for (size_t i = 0; i < in_merge_indices.size(); i++) { sum_cloud += *(in_clusters[in_merge_indices[i]]->GetCloud()); in_out_merged_clusters[in_merge_indices[i]] = true; } std::vector<int> indices(sum_cloud.points.size(), 0); for (size_t i = 0; i < sum_cloud.points.size(); i++) { indices[i] = i; } if (sum_cloud.points.size() > 0) { pcl::copyPointCloud(sum_cloud, mono_cloud); merged_cluster->SetCloud(mono_cloud.makeShared(), indices, _velodyne_header, current_index, (int) _colors[current_index].val[0], (int) _colors[current_index].val[1], (int) _colors[current_index].val[2], "", _pose_estimation); out_clusters.push_back(merged_cluster); } } void checkAllForMerge(std::vector<ClusterPtr> &in_clusters, std::vector<ClusterPtr> &out_clusters, float in_merge_threshold) { // std::cout << "checkAllForMerge" << std::endl; std::vector<bool> visited_clusters(in_clusters.size(), false); std::vector<bool> merged_clusters(in_clusters.size(), false); size_t current_index = 0; for (size_t i = 0; i < in_clusters.size(); i++) { if (!visited_clusters[i]) { visited_clusters[i] = true; std::vector<size_t> merge_indices; checkClusterMerge(i, in_clusters, visited_clusters, merge_indices, in_merge_threshold); mergeClusters(in_clusters, out_clusters, merge_indices, current_index++, merged_clusters); } } for (size_t i = 0; i < in_clusters.size(); i++) { // check for clusters not merged, add them to the output if (!merged_clusters[i]) { out_clusters.push_back(in_clusters[i]); } } // ClusterPtr cluster(new Cluster()); } void segmentByDistance(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZRGB>::Ptr out_cloud_ptr, autoware_msgs::Centroids &in_out_centroids, autoware_msgs::CloudClusterArray &in_out_clusters) { // cluster the pointcloud according to the distance of the points using different thresholds (not only one for the // entire pc) // in this way, the points farther in the pc will also be clustered // 0 => 0-15m d=0.5 // 1 => 15-30 d=1 // 2 => 30-45 d=1.6 // 3 => 45-60 d=2.1 // 4 => >60 d=2.6 std::vector<ClusterPtr> all_clusters; if (!_use_multiple_thres) { pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); for (unsigned int i = 0; i < in_cloud_ptr->points.size(); i++) { pcl::PointXYZ current_point; current_point.x = in_cloud_ptr->points[i].x; current_point.y = in_cloud_ptr->points[i].y; current_point.z = in_cloud_ptr->points[i].z; cloud_ptr->points.push_back(current_point); } #ifdef GPU_CLUSTERING if (_use_gpu) { all_clusters = clusterAndColorGpu(cloud_ptr, out_cloud_ptr, in_out_centroids, _clustering_distance); } else { all_clusters = clusterAndColor(cloud_ptr, out_cloud_ptr, in_out_centroids, _clustering_distance); } #else all_clusters = clusterAndColor(cloud_ptr, out_cloud_ptr, in_out_centroids, _clustering_distance); #endif } else { std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> cloud_segments_array(5); for (unsigned int i = 0; i < cloud_segments_array.size(); i++) { pcl::PointCloud<pcl::PointXYZ>::Ptr tmp_cloud(new pcl::PointCloud<pcl::PointXYZ>); cloud_segments_array[i] = tmp_cloud; } for (unsigned int i = 0; i < in_cloud_ptr->points.size(); i++) { pcl::PointXYZ current_point; current_point.x = in_cloud_ptr->points[i].x; current_point.y = in_cloud_ptr->points[i].y; current_point.z = in_cloud_ptr->points[i].z; float origin_distance = sqrt(pow(current_point.x, 2) + pow(current_point.y, 2)); if (origin_distance < _clustering_ranges[0]) { cloud_segments_array[0]->points.push_back(current_point); } else if (origin_distance < _clustering_ranges[1]) { cloud_segments_array[1]->points.push_back(current_point); }else if (origin_distance < _clustering_ranges[2]) { cloud_segments_array[2]->points.push_back(current_point); }else if (origin_distance < _clustering_ranges[3]) { cloud_segments_array[3]->points.push_back(current_point); }else { cloud_segments_array[4]->points.push_back(current_point); } } std::vector<ClusterPtr> local_clusters; for (unsigned int i = 0; i < cloud_segments_array.size(); i++) { #ifdef GPU_CLUSTERING if (_use_gpu) { local_clusters = clusterAndColorGpu(cloud_segments_array[i], out_cloud_ptr, in_out_centroids, _clustering_distances[i]); } else { local_clusters = clusterAndColor(cloud_segments_array[i], out_cloud_ptr, in_out_centroids, _clustering_distances[i]); } #else local_clusters = clusterAndColor( cloud_segments_array[i], out_cloud_ptr, in_out_centroids, _clustering_distances[i]); #endif all_clusters.insert(all_clusters.end(), local_clusters.begin(), local_clusters.end()); } } // Clusters can be merged or checked in here //.... // check for mergable clusters std::vector<ClusterPtr> mid_clusters; std::vector<ClusterPtr> final_clusters; if (all_clusters.size() > 0) checkAllForMerge(all_clusters, mid_clusters, _cluster_merge_threshold); else mid_clusters = all_clusters; if (mid_clusters.size() > 0) checkAllForMerge(mid_clusters, final_clusters, _cluster_merge_threshold); else final_clusters = mid_clusters; // Get final PointCloud to be published //add jsk_recognition_msgs::BoundingBoxArray bbox_array; for (unsigned int i = 0; i < final_clusters.size(); i++) { *out_cloud_ptr = *out_cloud_ptr + *(final_clusters[i]->GetCloud()); jsk_recognition_msgs::BoundingBox bounding_box = final_clusters[i]->GetBoundingBox(); geometry_msgs::PolygonStamped polygon = final_clusters[i]->GetPolygon(); jsk_rviz_plugins::Pictogram pictogram_cluster; pictogram_cluster.header = _velodyne_header; // PICTO pictogram_cluster.mode = pictogram_cluster.STRING_MODE; pictogram_cluster.pose.position.x = final_clusters[i]->GetMaxPoint().x; pictogram_cluster.pose.position.y = final_clusters[i]->GetMaxPoint().y; pictogram_cluster.pose.position.z = final_clusters[i]->GetMaxPoint().z; tf::Quaternion quat(0.0, -0.7, 0.0, 0.7); tf::quaternionTFToMsg(quat, pictogram_cluster.pose.orientation); pictogram_cluster.size = 4; std_msgs::ColorRGBA color; color.a = 1; color.r = 1; color.g = 1; color.b = 1; pictogram_cluster.color = color; pictogram_cluster.character = std::to_string(i); // PICTO // pcl::PointXYZ min_point = final_clusters[i]->GetMinPoint(); // pcl::PointXYZ max_point = final_clusters[i]->GetMaxPoint(); pcl::PointXYZ center_point = final_clusters[i]->GetCentroid(); geometry_msgs::Point centroid; centroid.x = center_point.x; centroid.y = center_point.y; centroid.z = center_point.z; bounding_box.header = _velodyne_header; polygon.header = _velodyne_header; if (final_clusters[i]->IsValid()) { in_out_centroids.points.push_back(centroid); autoware_msgs::CloudCluster cloud_cluster; final_clusters[i]->ToROSMessage(_velodyne_header, cloud_cluster); in_out_clusters.clusters.push_back(cloud_cluster); } bbox_array.boxes.push_back(bounding_box); } bbox_array.header = _velodyne_header; pub_bounding_boxs_.publish(bbox_array); } void removeFloor(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_nofloor_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_onlyfloor_cloud_ptr, float in_max_height = 0.2, float in_floor_max_angle = 0.1) { pcl::SACSegmentation<pcl::PointXYZ> seg; pcl::PointIndices::Ptr inliers(new pcl::PointIndices); pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients); seg.setOptimizeCoefficients(true); seg.setModelType(pcl::SACMODEL_PERPENDICULAR_PLANE); seg.setMethodType(pcl::SAC_RANSAC); seg.setMaxIterations(100); seg.setAxis(Eigen::Vector3f(0, 0, 1)); seg.setEpsAngle(in_floor_max_angle); seg.setDistanceThreshold(in_max_height); // floor distance seg.setOptimizeCoefficients(true); seg.setInputCloud(in_cloud_ptr); seg.segment(*inliers, *coefficients); if (inliers->indices.size() == 0) { std::cout << "Could not estimate a planar model for the given dataset." << std::endl; } // REMOVE THE FLOOR FROM THE CLOUD pcl::ExtractIndices<pcl::PointXYZ> extract; extract.setInputCloud(in_cloud_ptr); extract.setIndices(inliers); extract.setNegative(true); // true removes the indices, false leaves only the indices extract.filter(*out_nofloor_cloud_ptr); // EXTRACT THE FLOOR FROM THE CLOUD extract.setNegative(false); // true removes the indices, false leaves only the indices extract.filter(*out_onlyfloor_cloud_ptr); } void downsampleCloud(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_cloud_ptr, float in_leaf_size = 0.2) { pcl::VoxelGrid<pcl::PointXYZ> sor; sor.setInputCloud(in_cloud_ptr); sor.setLeafSize((float) in_leaf_size, (float) in_leaf_size, (float) in_leaf_size); sor.filter(*out_cloud_ptr); } void clipCloud(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_cloud_ptr, float in_min_height = -1.3, float in_max_height = 0.5) { out_cloud_ptr->points.clear(); for (unsigned int i = 0; i < in_cloud_ptr->points.size(); i++) { if (in_cloud_ptr->points[i].z >= in_min_height && in_cloud_ptr->points[i].z <= in_max_height) { out_cloud_ptr->points.push_back(in_cloud_ptr->points[i]); } } } void differenceNormalsSegmentation(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_cloud_ptr) { float small_scale = 0.5; float large_scale = 2.0; float angle_threshold = 0.5; pcl::search::Search<pcl::PointXYZ>::Ptr tree; if (in_cloud_ptr->isOrganized()) { tree.reset(new pcl::search::OrganizedNeighbor<pcl::PointXYZ>()); } else { tree.reset(new pcl::search::KdTree<pcl::PointXYZ>(false)); } // Set the input pointcloud for the search tree tree->setInputCloud(in_cloud_ptr); pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::PointNormal> normal_estimation; // pcl::gpu::NormalEstimation<pcl::PointXYZ, pcl::PointNormal> normal_estimation; normal_estimation.setInputCloud(in_cloud_ptr); normal_estimation.setSearchMethod(tree); normal_estimation.setViewPoint(std::numeric_limits<float>::max(), std::numeric_limits<float>::max(), std::numeric_limits<float>::max()); pcl::PointCloud<pcl::PointNormal>::Ptr normals_small_scale(new pcl::PointCloud<pcl::PointNormal>); pcl::PointCloud<pcl::PointNormal>::Ptr normals_large_scale(new pcl::PointCloud<pcl::PointNormal>); normal_estimation.setRadiusSearch(small_scale); normal_estimation.compute(*normals_small_scale); normal_estimation.setRadiusSearch(large_scale); normal_estimation.compute(*normals_large_scale); pcl::PointCloud<pcl::PointNormal>::Ptr diffnormals_cloud(new pcl::PointCloud<pcl::PointNormal>); pcl::copyPointCloud<pcl::PointXYZ, pcl::PointNormal>(*in_cloud_ptr, *diffnormals_cloud); // Create DoN operator pcl::DifferenceOfNormalsEstimation<pcl::PointXYZ, pcl::PointNormal, pcl::PointNormal> diffnormals_estimator; diffnormals_estimator.setInputCloud(in_cloud_ptr); diffnormals_estimator.setNormalScaleLarge(normals_large_scale); diffnormals_estimator.setNormalScaleSmall(normals_small_scale); diffnormals_estimator.initCompute(); diffnormals_estimator.computeFeature(*diffnormals_cloud); pcl::ConditionOr<pcl::PointNormal>::Ptr range_cond(new pcl::ConditionOr<pcl::PointNormal>()); range_cond->addComparison(pcl::FieldComparison<pcl::PointNormal>::ConstPtr( new pcl::FieldComparison<pcl::PointNormal>("curvature", pcl::ComparisonOps::GT, angle_threshold))); // Build the filter pcl::ConditionalRemoval<pcl::PointNormal> cond_removal; cond_removal.setCondition(range_cond); cond_removal.setInputCloud(diffnormals_cloud); pcl::PointCloud<pcl::PointNormal>::Ptr diffnormals_cloud_filtered(new pcl::PointCloud<pcl::PointNormal>); // Apply filter cond_removal.filter(*diffnormals_cloud_filtered); pcl::copyPointCloud<pcl::PointNormal, pcl::PointXYZ>(*diffnormals_cloud, *out_cloud_ptr); } void removePointsUpTo(const pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud_ptr, pcl::PointCloud<pcl::PointXYZ>::Ptr out_cloud_ptr, const double in_distance) { out_cloud_ptr->points.clear(); for (unsigned int i = 0; i < in_cloud_ptr->points.size(); i++) { float origin_distance = sqrt(pow(in_cloud_ptr->points[i].x, 2) + pow(in_cloud_ptr->points[i].y, 2)); if (origin_distance > in_distance) { out_cloud_ptr->points.push_back(in_cloud_ptr->points[i]); } } } void velodyne_callback(const sensor_msgs::PointCloud2ConstPtr& in_sensor_cloud) { //_start = std::chrono::system_clock::now(); if (!_using_sensor_cloud) { _using_sensor_cloud = true; pcl::PointCloud<pcl::PointXYZ>::Ptr current_sensor_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr removed_points_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr downsampled_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr inlanes_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr nofloor_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr onlyfloor_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr diffnormals_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZ>::Ptr clipped_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>); pcl::PointCloud<pcl::PointXYZRGB>::Ptr colored_clustered_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>); autoware_msgs::Centroids centroids; autoware_msgs::CloudClusterArray cloud_clusters; pcl::fromROSMsg(*in_sensor_cloud, *current_sensor_cloud_ptr); _velodyne_header = in_sensor_cloud->header; if (_remove_points_upto > 0.0) { removePointsUpTo(current_sensor_cloud_ptr, removed_points_cloud_ptr, _remove_points_upto); } else { removed_points_cloud_ptr = current_sensor_cloud_ptr; } if (_downsample_cloud) downsampleCloud(removed_points_cloud_ptr, downsampled_cloud_ptr, _leaf_size); else downsampled_cloud_ptr = removed_points_cloud_ptr; clipCloud(downsampled_cloud_ptr, clipped_cloud_ptr, _clip_min_height, _clip_max_height); if (_keep_lanes) keepLanePoints(clipped_cloud_ptr, inlanes_cloud_ptr, _keep_lane_left_distance, _keep_lane_right_distance); else inlanes_cloud_ptr = clipped_cloud_ptr; if (_remove_ground) { removeFloor(inlanes_cloud_ptr, nofloor_cloud_ptr, onlyfloor_cloud_ptr); publishCloud(&_pub_ground_cloud, onlyfloor_cloud_ptr); } else { nofloor_cloud_ptr = inlanes_cloud_ptr; } publishCloud(&_pub_points_lanes_cloud, nofloor_cloud_ptr); if (_use_diffnormals) differenceNormalsSegmentation(nofloor_cloud_ptr, diffnormals_cloud_ptr); else diffnormals_cloud_ptr = nofloor_cloud_ptr; segmentByDistance(diffnormals_cloud_ptr, colored_clustered_cloud_ptr, centroids, cloud_clusters); publishColorCloud(&_pub_cluster_cloud, colored_clustered_cloud_ptr); centroids.header = _velodyne_header; publishCentroids(&_centroid_pub, centroids, _output_frame, _velodyne_header); cloud_clusters.header = _velodyne_header; publishCloudClusters(&_pub_clusters_message, cloud_clusters, _output_frame, _velodyne_header); _using_sensor_cloud = false; } } int main(int argc, char **argv) { // Initialize ROS ros::init(argc, argv, "euclidean_cluster"); ros::NodeHandle h; ros::NodeHandle private_nh("~"); tf::StampedTransform transform; tf::TransformListener listener; tf::TransformListener vectormap_tf_listener; _vectormap_transform_listener = &vectormap_tf_listener; _transform = &transform; _transform_listener = &listener; #if (CV_MAJOR_VERSION == 3) generateColors(_colors, 255); #else cv::generateColors(_colors, 255); #endif _pub_cluster_cloud = h.advertise<sensor_msgs::PointCloud2>("/points_cluster", 1); _pub_ground_cloud = h.advertise<sensor_msgs::PointCloud2>("/points_ground", 1); _centroid_pub = h.advertise<autoware_msgs::Centroids>("/cluster_centroids", 1); _pub_points_lanes_cloud = h.advertise<sensor_msgs::PointCloud2>("/points_lanes", 1); _pub_clusters_message = h.advertise<autoware_msgs::CloudClusterArray>("/detection/lidar_detector/cloud_clusters", 1); _pub_detected_objects = h.advertise<autoware_msgs::DetectedObjectArray>("/detection/lidar_detector/objects", 1); pub_bounding_boxs_ = h.advertise<jsk_recognition_msgs::BoundingBoxArray>("/bounding_boxes", 5); std::string points_topic, gridmap_topic; _using_sensor_cloud = false; if (private_nh.getParam("points_node", points_topic)) { ROS_INFO("euclidean_cluster > Setting points node to %s", points_topic.c_str()); } else { ROS_INFO("euclidean_cluster > No points node received, defaulting to points_raw, you can use " "_points_node:=YOUR_TOPIC"); points_topic = "/points_raw"; } _use_diffnormals = false; if (private_nh.getParam("use_diffnormals", _use_diffnormals)) { if (_use_diffnormals) ROS_INFO("Euclidean Clustering: Applying difference of normals on clustering pipeline"); else ROS_INFO("Euclidean Clustering: Difference of Normals will not be used."); } /* Initialize tuning parameter */ private_nh.param("downsample_cloud", _downsample_cloud, false); ROS_INFO("[%s] downsample_cloud: %d", __APP_NAME__, _downsample_cloud); private_nh.param("remove_ground", _remove_ground, true); ROS_INFO("[%s] remove_ground: %d", __APP_NAME__, _remove_ground); private_nh.param("leaf_size", _leaf_size, 0.1); ROS_INFO("[%s] leaf_size: %f", __APP_NAME__, _leaf_size); private_nh.param("cluster_size_min", _cluster_size_min, 20); ROS_INFO("[%s] cluster_size_min %d", __APP_NAME__, _cluster_size_min); private_nh.param("cluster_size_max", _cluster_size_max, 100000); ROS_INFO("[%s] cluster_size_max: %d", __APP_NAME__, _cluster_size_max); private_nh.param("pose_estimation", _pose_estimation, false); ROS_INFO("[%s] pose_estimation: %d", __APP_NAME__, _pose_estimation); private_nh.param("clip_min_height", _clip_min_height, -1.3); ROS_INFO("[%s] clip_min_height: %f", __APP_NAME__, _clip_min_height); private_nh.param("clip_max_height", _clip_max_height, 0.5); ROS_INFO("[%s] clip_max_height: %f", __APP_NAME__, _clip_max_height); private_nh.param("keep_lanes", _keep_lanes, false); ROS_INFO("[%s] keep_lanes: %d", __APP_NAME__, _keep_lanes); private_nh.param("keep_lane_left_distance", _keep_lane_left_distance, 5.0); ROS_INFO("[%s] keep_lane_left_distance: %f", __APP_NAME__, _keep_lane_left_distance); private_nh.param("keep_lane_right_distance", _keep_lane_right_distance, 5.0); ROS_INFO("[%s] keep_lane_right_distance: %f", __APP_NAME__, _keep_lane_right_distance); private_nh.param("cluster_merge_threshold", _cluster_merge_threshold, 1.5); ROS_INFO("[%s] cluster_merge_threshold: %f", __APP_NAME__, _cluster_merge_threshold); private_nh.param<std::string>("output_frame", _output_frame, "velodyne"); ROS_INFO("[%s] output_frame: %s", __APP_NAME__, _output_frame.c_str()); private_nh.param("remove_points_upto", _remove_points_upto, 0.0); ROS_INFO("[%s] remove_points_upto: %f", __APP_NAME__, _remove_points_upto); private_nh.param("clustering_distance", _clustering_distance, 0.75); ROS_INFO("[%s] clustering_distance: %f", __APP_NAME__, _clustering_distance); private_nh.param("use_gpu", _use_gpu, false); ROS_INFO("[%s] use_gpu: %d", __APP_NAME__, _use_gpu); private_nh.param("use_multiple_thres", _use_multiple_thres, false); ROS_INFO("[%s] use_multiple_thres: %d", __APP_NAME__, _use_multiple_thres); std::string str_distances; std::string str_ranges; private_nh.param("clustering_distances", str_distances, std::string("[0.5,1.1,1.6,2.1,2.6]")); ROS_INFO("[%s] clustering_distances: %s", __APP_NAME__, str_distances.c_str()); private_nh.param("clustering_ranges", str_ranges, std::string("[15,30,45,60]")); ROS_INFO("[%s] clustering_ranges: %s", __APP_NAME__, str_ranges.c_str()); if (_use_multiple_thres) { YAML::Node distances = YAML::Load(str_distances); YAML::Node ranges = YAML::Load(str_ranges); size_t distances_size = distances.size(); size_t ranges_size = ranges.size(); if (distances_size == 0 || ranges_size == 0) { ROS_ERROR("Invalid size of clustering_ranges or/and clustering_distance. \ The size of clustering distance and clustering_ranges should not be 0"); ros::shutdown(); } if ((distances_size - ranges_size) != 1) { ROS_ERROR("Invalid size of clustering_ranges or/and clustering_distance. \ Expecting that (distances_size - ranges_size) == 1 "); ros::shutdown(); } for (size_t i_distance = 0; i_distance < distances_size; i_distance++) { _clustering_distances.push_back(distances[i_distance].as<double>()); } for (size_t i_range = 0; i_range < ranges_size; i_range++) { _clustering_ranges.push_back(ranges[i_range].as<double>()); } } _velodyne_transform_available = false; // Create a ROS subscriber for the input point cloud ros::Subscriber sub = h.subscribe(points_topic, 1, velodyne_callback); // Spin ros::spin(); } -
重新编译:
单独编译-GPU版本:
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --continue-on-error --packages-select lidar_euclidean_cluster_detect单独编译-CPU版本:
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --continue-on-error --packages-select lidar_euclidean_cluster_detect全部编译:
colcon build
这一步大概率会报错这一步大概率会报错:不过这个错没啥事
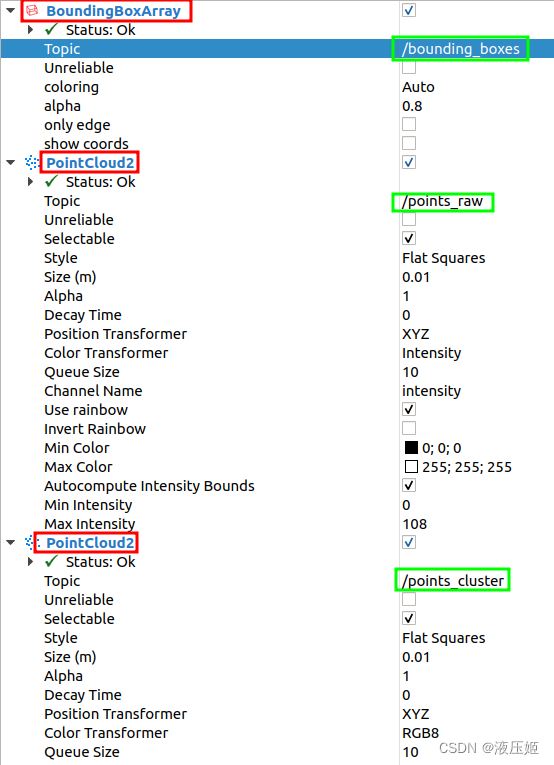
boundingboxs显示操作:
1.把仿真先跑起来,再暂停。
2. 再切换到Computing分页,勾选lidar_detection-> 下的Euclidean Cluster。
3. 启动rviz
4. 其中box部分要这样设置














 3403
3403











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









