







机器人和计算机视觉中的一个基本要求是能够表示物体在环境中的位置和方向。这些物体包括机器人、摄像机、工件、障碍物和路径。
空间中的点是数学中一个熟悉的概念,它可以被描述为一个坐标向量,也被称为一个约束向量,如图 (a) 所示。向量表示点相对于某个参考坐标系的位移。一个坐标系或笛卡儿坐标系统,是由一组正交轴构成的,这些轴相交于一个被称为原点的点。
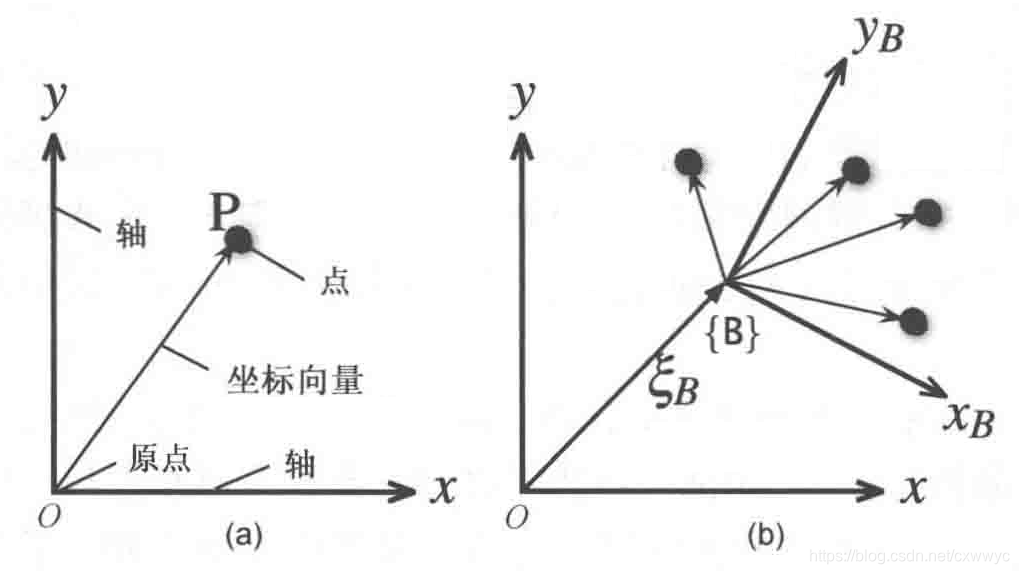
更多时候我们需要考虑组成物体的一组点。我们认为物体是刚性的,构成它的点相对于物体坐标系保持固定的相对位置,如图 (b) 所示。然而我们表示物体位置和方向时并不是描述其上单独的点,而是用该物体坐标系的位置和方向来描述。坐标系有自己的标记,比如这里的 { B } \{B\} {
B} ,其坐标轴 x B x_B xB 和 y B y_B yB 采用坐标系的标记作为其下标。
坐标系的位置和方向总称为位姿,图形上表示为一组坐标轴。相对于一个参考坐标系的某个坐标系的相对位姿用符号 ξ \xi ξ 表示。下图显示了两个坐标系 { A } \{A\} {
A} 、 { B } \{B\} {
B} ,以及 { B } \{B\} {
B} 相对于 { A } \{A\} {
A} 的相对位姿 A ξ B ^A\xi_B AξB 。前面的上标表示参考坐标系,下标表示被描述的坐标系。我们也可以认为 A ξ B ^A\xi_B AξB 描述了一组动作——对 { A } \{A\} {
A} 施加平移和旋转使它转化为 { B } \{B\} {
B} 。如果没有初始上标,我们默认位姿的变化是相对于用 O O O 表示的世界坐标系的。在图中的 P P P 点可用任何一个坐标系表示。用式子表示为
A p = A ξ B ⋅ B p (1) \tag{1} ^Ap={}^A\xi_B \cdot {}^Bp Ap=AξB⋅Bp(1)
等式右侧表示从 { A } \{A\} {
A} 到 { B } \{B\} {
B} 然后到 P P P 的动作。运算符“ ⋅ \cdot </
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 744
744











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









