



目标:使用 ros2doctor 工具识别您的 ROS 2 设置中的问题。
教程级别:初学者
时间:10 分钟
目录
背景
先决条件
任务
1. 检查您的设置
2. 检查系统
3. 获取完整报告
摘要
相关内容
下一步
背景
当您的 ROS 2 设置未按预期运行时,您可以使用 ros2doctor 工具检查其设置。
ros2doctor 检查 ROS 2 的所有方面,包括平台、版本、网络、环境、运行系统等,并会提示您可能的错误及问题原因。
先决条件
ros2doctor 是 ros2cli 包的一部分。只要你安装了 ros2cli (任何正常的安装都应该有的),你就能使用 ros2doctor 。
本教程使用 turtlesim 来演示一些示例。
任务
1. 检查您的设置
让我们使用 ros2doctor 整体检查一下你的 ROS 2 设置。首先,在新终端中启动 ROS 2,然后输入命令:
ros2 doctor这将对您所有的设置模块进行检查,并返回警告和错误。
如果您的 ROS 2 设置完美无缺,您将看到类似这样的消息:
All <n> checks passed然而,收到一些警告并不罕见。一个 UserWarning 并不意味着你的设置无法使用;它更可能只是表明某些配置的方式不是最理想的。
如果您收到警告,它看起来会是这样的:
<path>: <line>: UserWarning: <message>cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 doctor
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/package.py: 130: UserWarning: Cannot find the latest versions of packages: test_tf2 test_tracetools test_communication rmw_connextddsmicro test_tracetools_launch [...]. Use `ros2 doctor --report` to see full list.
All 5 checks passed例如,如果您使用的是不稳定的 ROS 2 发行版, ros2doctor 将会发现这个警告:
UserWarning: Distribution <distro> is not fully supported or tested. To get more consistent features, download a stable version at https://index.ros.org/doc/ros2/Installation/如果 ros2doctor 只在您的系统中发现警告,您仍将收到 All <n> checks passed 消息。
大多数检查被归类为警告而不是错误。通常由您,用户,来确定 ros2doctor 返回的反馈的重要性。如果它确实在您的设置中发现了一个罕见的错误,由 UserWarning: ERROR: 表示,那么检查就被视为失败。
您将看到一条与以下问题反馈列表类似的消息:
1/3 checks failed
Failed modules: network错误表明系统缺少对 ROS 2 至关重要的重要设置或功能。应当解决错误以确保系统正常运行。
2. 检查系统
您也可以检查正在运行的 ROS 2 系统,以确定问题的可能原因。要在运行系统上查看 ros2doctor 的工作情况,让我们运行 turtlesim,它有节点在相互积极通信。
启动系统,打开一个新的终端,获取 ROS 2 资源,并输入命令:
ros2 run turtlesim turtlesim_node打开另一个终端并加载 ROS 2 来运行遥控操作:
ros2 run turtlesim turtle_teleop_key现在在它自己的终端再次运行 ros2doctor 。如果您有的话,您将看到上次在您的设置上运行 ros2doctor 时出现的警告和错误。在这些之后,将会有一些关于系统本身的新警告:
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 doctor
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/package.py: 130: UserWarning: Cannot find the latest versions of packages: test_tf2 test_tracetools test_communication rmw_connextddsmicro test_tracetools_launch [...]. Use `ros2 doctor --report` to see full list.
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/topic.py: 42: UserWarning: Publisher without subscriber detected on /turtle1/color_sensor.
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/topic.py: 42: UserWarning: Publisher without subscriber detected on /turtle1/pose.
All 5 checks passed看起来 /turtlesim 节点发布的数据到两个没有被订阅的主题,而 ros2doctor 认为这可能会导致问题。
如果您运行命令来回显 /color_sensor 和 /pose 主题,那些警告将会消失,因为发布者将会有订阅者。
您可以在 turtlesim 仍在运行的同时,打开两个新的终端,在每个终端中配置 ROS 2,并在各自的终端中运行以下命令来尝试这一操作:
ros2 topic echo /turtle1/color_sensor
ros2 topic echo /turtle1/pose再次在其终端运行ros2doctor。发布者没有订阅者警告将会消失。(确保在运行echo的终端中输入Ctrl+C)。
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 doctor
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/package.py: 130: UserWarning: Cannot find the latest versions of packages: test_tf2 test_tracetools test_communication rmw_connextddsmicro test_tracetools_launch [...]. Use `ros2 doctor --report` to see full list.
All 5 checks passed现在尝试退出 turtlesim 窗口或退出 teleop 并再次运行 ros2doctor 。你会看到更多警告,表明 publisher without subscriber 或 subscriber without publisher 对于不同的主题,现在系统中的一个节点不可用。
cxy@ubuntu2404-cxy:~/ros2_ws$ ros2 doctor
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/package.py: 130: UserWarning: Cannot find the latest versions of packages: test_tf2 test_tracetools test_communication rmw_connextddsmicro test_tracetools_launch [...]. Use `ros2 doctor --report` to see full list.
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/topic.py: 45: UserWarning: Subscriber without publisher detected on /turtle1/cmd_vel.
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/topic.py: 42: UserWarning: Publisher without subscriber detected on /turtle1/rotate_absolute/_action/feedback.
/home/cxy/ros2_jazzy/build/ros2doctor/ros2doctor/api/topic.py: 42: UserWarning: Publisher without subscriber detected on /turtle1/rotate_absolute/_action/status.
All 5 checks passed在一个拥有许多节点的复杂系统中, ros2doctor 对于识别通信问题的可能原因将是非常宝贵的。
3. 获取完整报告
当 ros2doctor 会向您发出有关您的网络、系统等的警告时,使用 --report 参数运行它将为您提供更多详细信息,以帮助您分析问题。
您可能需要使用 --report ,如果您收到有关网络设置的警告,并希望准确了解是配置的哪个部分导致了警告。
当您需要开启一个支持票以获得 ROS 2 的帮助时,这也是非常有用的。您可以将报告中相关部分复制并粘贴到票据中,以便帮助您的人更好地理解您的环境并提供更好的协助。
要获取完整报告,请在终端输入以下命令:
ros2 doctor --report将返回一个信息列表,分为五组:
NETWORK CONFIGURATION
...
PLATFORM INFORMATION
...
RMW MIDDLEWARE
...
ROS 2 INFORMATION
...
TOPIC LIST
...您可以在运行 ros2 doctor 时,将这里的信息与您收到的警告进行对照。例如,如果 ros2doctor 返回了先前提到的警告,即您的发行版“未得到完全支持或测试”,您可能会查看报告中的 ROS 2 INFORMATION 部分:
distribution name : <distro>
distribution type : ros2
distribution status : prerelease
release platforms : {'<platform>': ['<version>']}在这里您可以看到 distribution status 是 prerelease ,这就解释了为什么它没有得到完全支持。
摘要
ros2doctor 将会通知您 ROS 2 设置和运行系统中的问题。您可以通过使用 --report 参数来更深入地了解这些警告背后的信息。
请记住, ros2doctor 不是调试工具;它无法帮助您解决代码中的错误或系统实施方面的问题。
相关内容
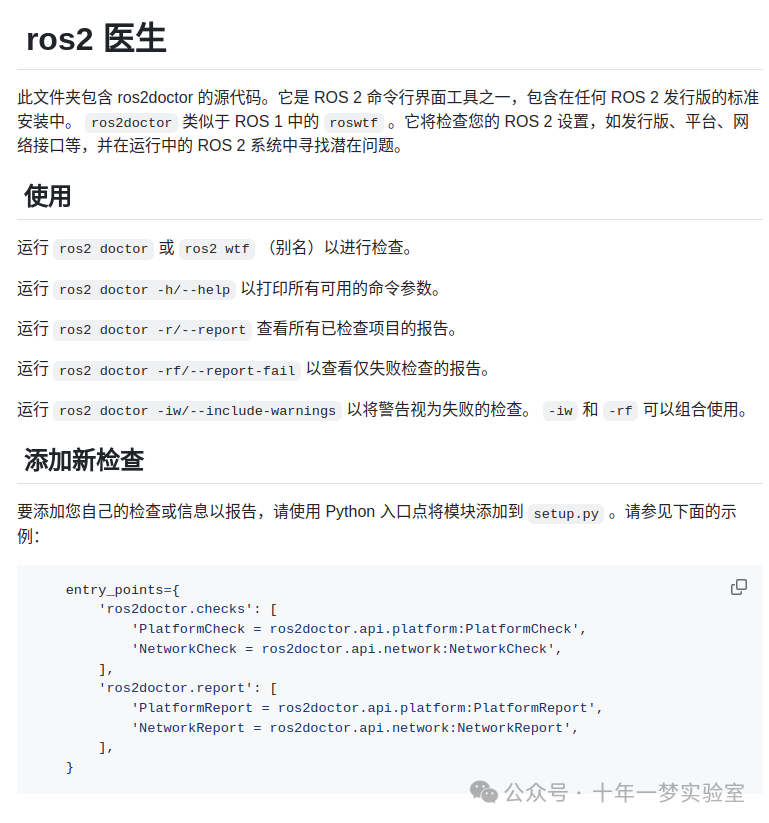
ros2doctor 的 README https://github.com/ros2/ros2cli/tree/jazzy/ros2doctor 将告诉您更多关于不同参数的信息。您可能也想浏览一下 ros2doctor 仓库,因为它非常适合初学者,是开始贡献的好地方。
下一步
您已完成初级教程!

















 6223
6223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









