






 本文介绍了基于跟踪微分器的智能车辆加速度闭环控制技术,通过辨识和估计加速度实现精确控制,提升车辆安全性和舒适性。系统包含动力学模型、驱动力矩模块和PID控制器,具有良好的实时性和滤波性能。
本文介绍了基于跟踪微分器的智能车辆加速度闭环控制技术,通过辨识和估计加速度实现精确控制,提升车辆安全性和舒适性。系统包含动力学模型、驱动力矩模块和PID控制器,具有良好的实时性和滤波性能。
基于跟踪微分器的智能车辆加速度闭环控制
采用跟踪微分器对加速度进行辨识,并对加速度进行闭环控制,从而实现对车辆加速或减速的纵向控制。
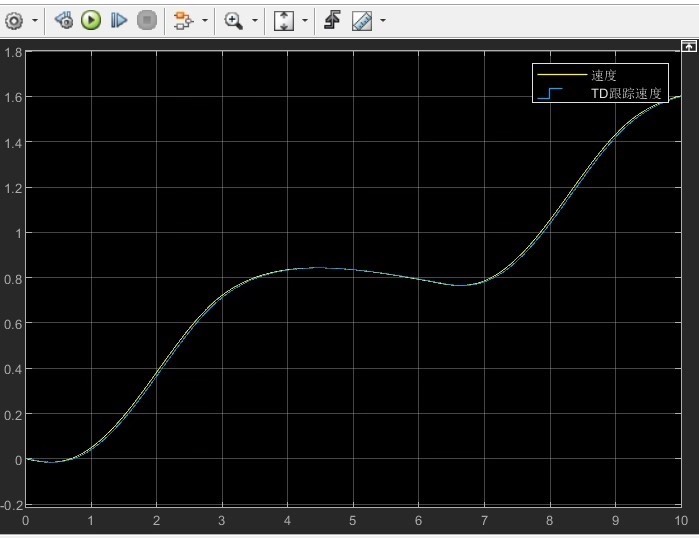
采用跟踪微分对加速度进行估计,对加速度有更好的滤波效果,速度具有非常好的跟踪效果,实时性更好。
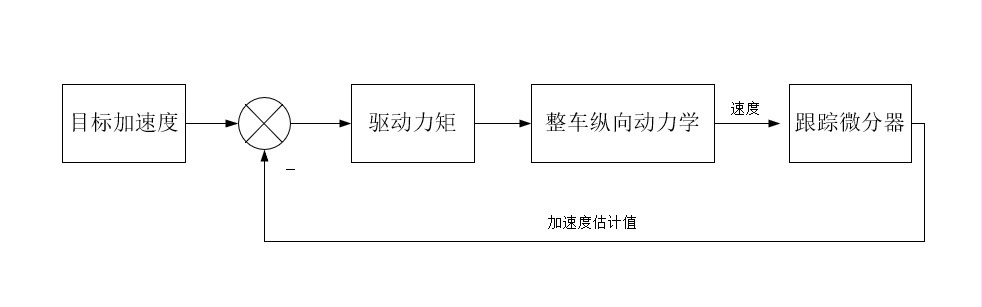
整个模型输入为目标加速度,内部模型包含跟踪微分器、整车纵向动力学模型、驱动力矩模块、PID控制器。
ID:32199729237206278
1874发哥
基于跟踪微分器的智能车辆加速度闭环控制技术
随着智能交通系统的快速发展,车辆的自动控制成为现代汽车工业的一个重要研究方向。在车辆的纵向控制中,加速度的精确控制是保证车辆安全性和乘坐舒适性的关键。
本文将介绍一种基于跟踪微分器的智能车辆加速度闭环控制技术。该技术通过对加速度进行辨识,并对加速度进行闭环控制,从而实现对车辆加速或减速的纵向控制。
该技术采用跟踪微分器对加速度进行估计,具有更好的滤波效果,从而能够获得更准确的加速度信息。跟踪微分器通过对输入信号进行微分和积分,可以消除高频噪音,并对低频信号进行平滑处理,从而为后续的闭环控制提供更为可靠的输入。
在整个控制系统中,输入信号为目标加速度。系统包含跟踪微分器、整车纵向动力学模型、驱动力矩模块和PID控制器。
首先,跟踪微分器对输入信号进行处理,获得估计的加速度。该估计值具有良好的准确性和实时性,能够及时反映车辆的加速度变化。
其次,整车纵向动力学模型根据车辆的物理特性和运动学原理,建立了对车辆纵向运动的数学模型。在模型中考虑了车辆的质量、惯性、摩擦等因素,能够准确地描述车辆在不同工况下的运动状态。
接着,驱动力矩模块通过对车辆的动力学模型进行计算,得到实际施加在车辆上的驱动力矩。该驱动力矩可以通过电控系统或传统的机械传动系统来实现,具体的实现方式可以根据具体的车辆类型和应用需求来确定。
最后,PID控制器根据目标加速度和估计的加速度之间的差异,调整驱动力矩的大小,使得实际的加速度逐渐趋向于目标值。PID控制器通过不断地调整比例、积分和微分参数,能够实现对加速度的精确控制,从而保证车辆的纵向运动的安全和稳定。
总结起来,基于跟踪微分器的智能车辆加速度闭环控制技术通过对加速度进行辨识,并采用跟踪微分器对加速度进行估计,能够实现对车辆加速或减速的精确控制。该技术具有较好的滤波效果和实时性,能够有效地提高车辆的安全性和乘坐舒适性。在实际应用中,可以根据具体的车辆类型和应用需求,灵活地调整和优化系统的参数和结构,以实现更为精确和稳定的控制效果。
综上所述,基于跟踪微分器的智能车辆加速度闭环控制技术在智能交通系统中具有广阔的应用前景。未来的研究可以进一步探索该技术在不同场景下的适用性和优化方法,以进一步提高车辆的自动控制能力和行驶安全性。同时,还可以结合其他先进的控制方法和传感器技术,进一步提高车辆控制系统的性能和可靠性。
以上相关代码,程序地址:http://wekup.cn/729237206278.html















 2201
2201

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









