






0.背景
要搞机器人,免不了要看看飞控怎么样。那如果没有飞控,用飞控的地面站Misson Planner进行模拟飞行,过过瘾,也是不错的。所以,我就装了个飞控的地面站Misson Planner,并且试图模拟飞行一下。
1.问题
刚开始,我自己随便模拟飞行了一下,没有飞行成功。于是,我就到网上看看别人是怎么模拟飞的。看到了下面这边文章。
ArduPilot飞控之Mission Planner模拟_mission planner 模拟飞行-CSDN博客
看到了这篇文章之后,我进行模拟飞行,还是没有飞行成功。于是我问博主,怎么才能成功飞行,博主只是让我看视频教程和参考资料,还是没有说出个所以然来,我也还是没有模拟飞行成功。说明,博主也没有很搞懂,否则不可能不能教会我飞行。那么,我今天就来写个保姆级的教程,教大家,让任何人都能飞行成功。
2. 保姆级教程
好了,大家跟着我一步一步来,保证可以飞行成功。
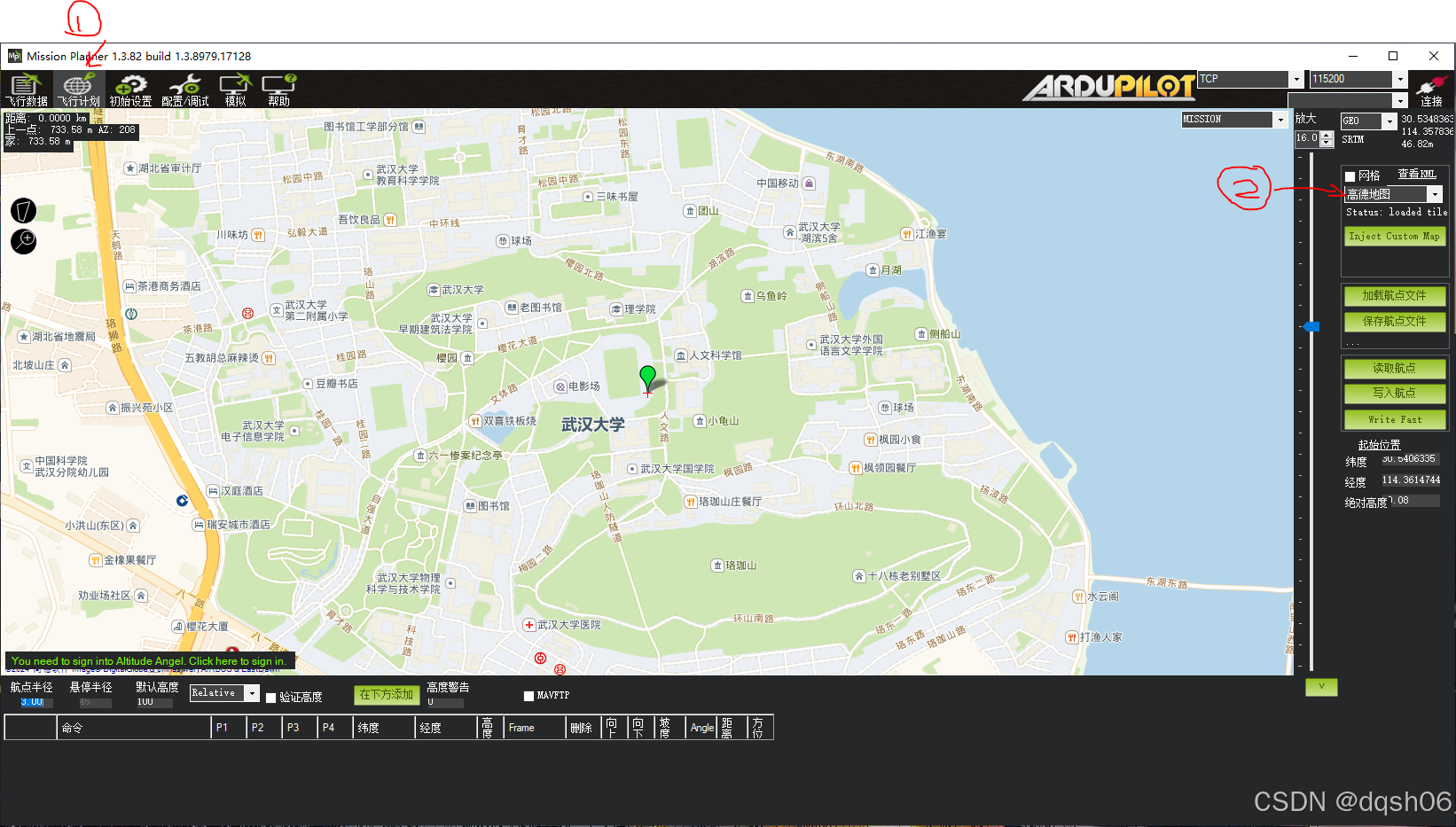
2.1 启动mission planner
我的画面是这样

2.2 到【飞行计划】里面,在右边的地图栏里选择【高德地图】
2.3 在【高德地图】上找到你所在的位置,点击右键,选择【set home here】, 这样就设置了你的所在位置,也就是飞行的起始位置了。可以在右边的起始位置看到你的经纬度和高度了。
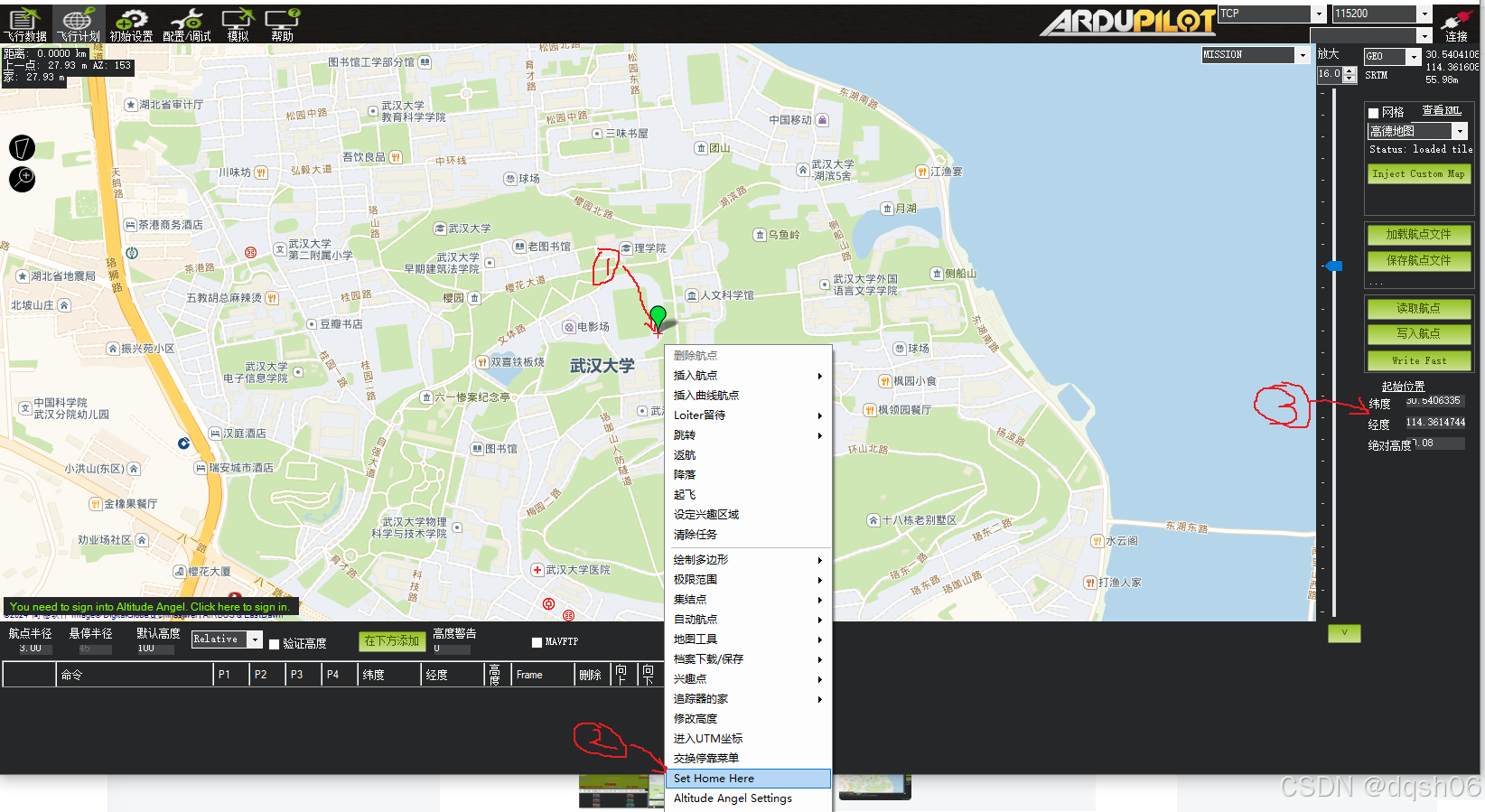
我设定的位置在武大,九一二操场,毛主席讲话台,前面。纬度30.540,经度114.361,高度0.08
2.4 到【模拟】标签,到下面选择机型,我选择的是四旋翼的multirotor. 选择最新版就行。

2.5 然后,软件就会下载SITL软件,你等着下载成功就行,啥也不用管。一会儿,下载成功了,就成这样的画面了。

可以看到,有个4旋翼的飞机已经停在武大的九一二操场了。右上角显示,飞行器已经跟地面站建立了连接。并且,飞行器锁定。
2.6 进行飞行路径的设定。到【飞行计划】里,选择你喜欢的飞行点。我的如下:
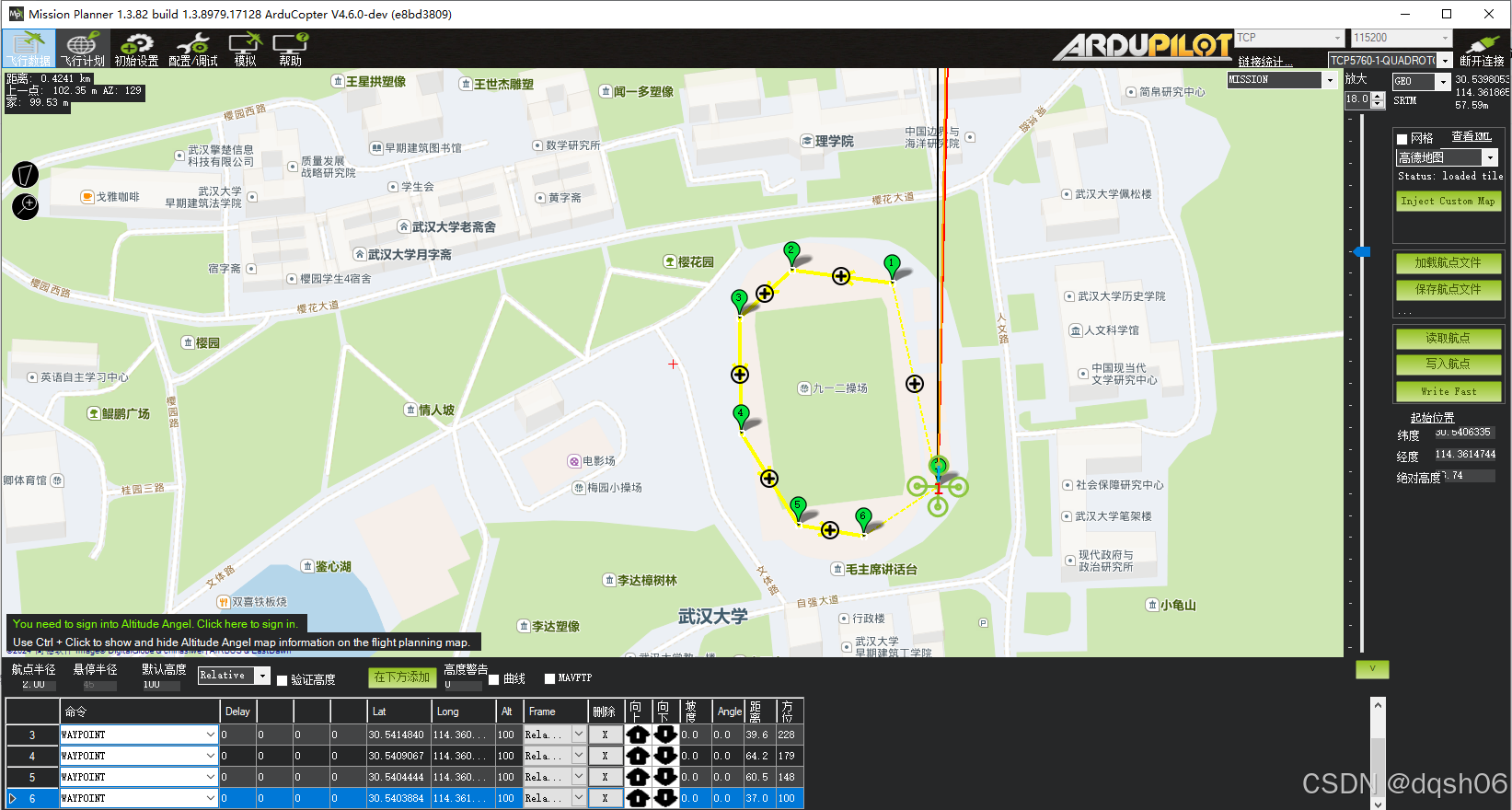 绕着操场跑一圈。这时,可以看到下面出现6个waypoint.
绕着操场跑一圈。这时,可以看到下面出现6个waypoint.
然后,把第6个waypoint改成【return to launch】

点击右边的写入航点。就OK了。可以看到,到第5点后,飞行器就会往Home飞了。
2.7 开始模拟飞行。我们回到【飞行数据】页,看到如下

说明,未准备解锁。3D加速度计没有校准,电池电压比较低。
不管他。
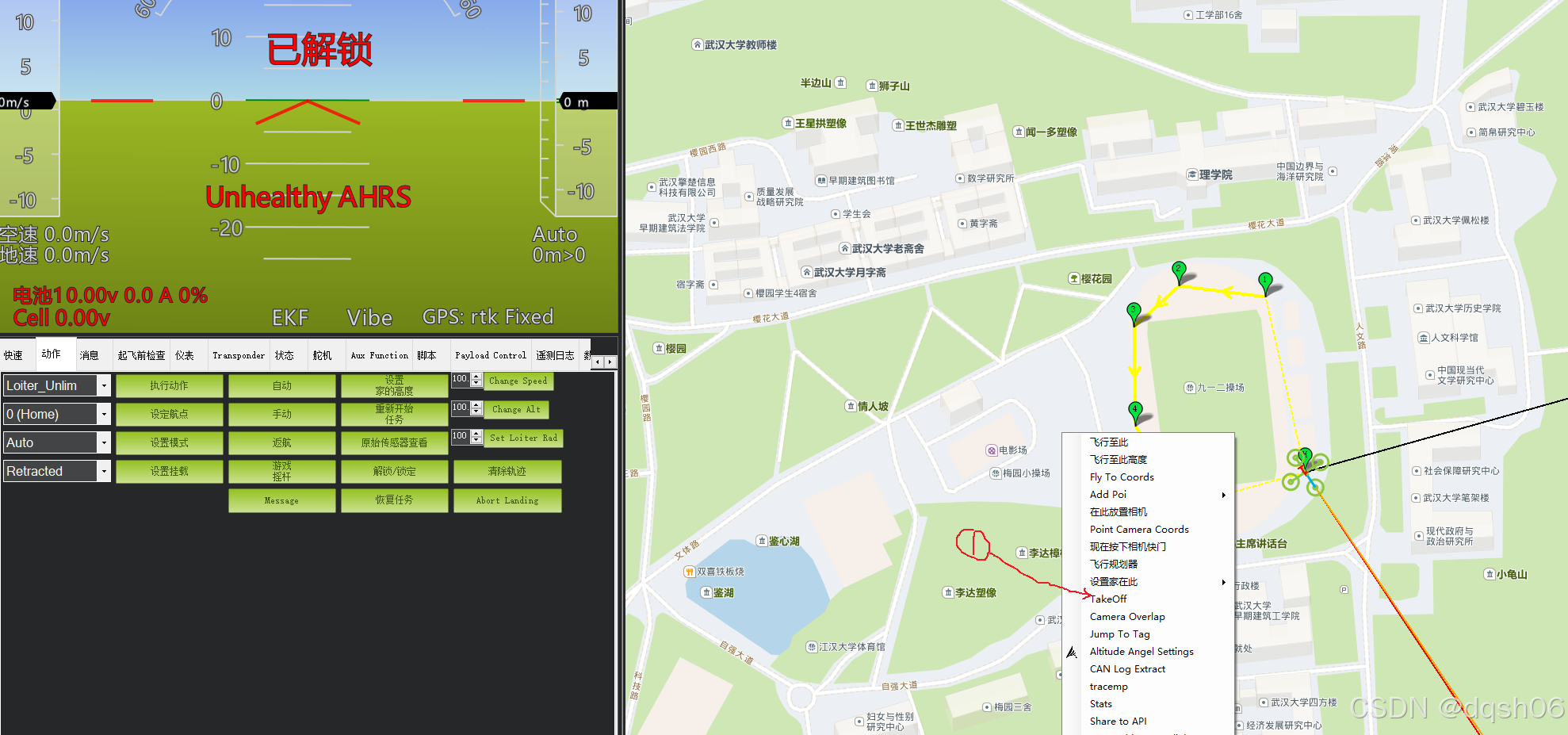
点击下面的【动作】页。点【解锁】进行解锁,

会出现对话框,强制解锁会导致飞行器crashing并导致严重的伤害,你要强制解锁吗?选【Force Arm】
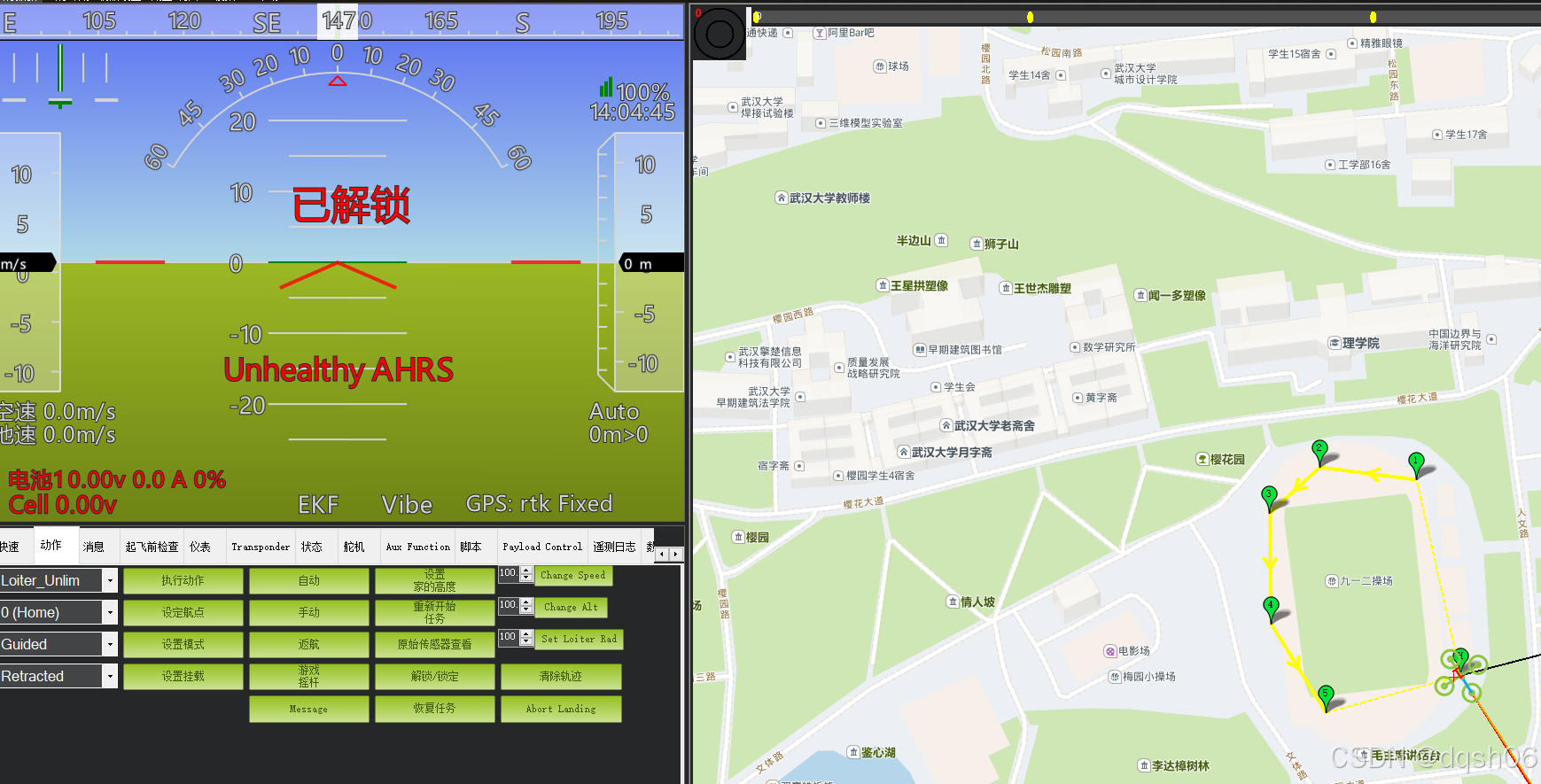
会看到已解锁,飞行姿态不健康的警告提示。
然后,在15秒内,在右边的地图上,点右键,在菜单中选【take off】
出现对话框,输入take off 高度

用缺省的5就行。点OK。
此时,模式自动变成Guided, 飞行器开始升空。
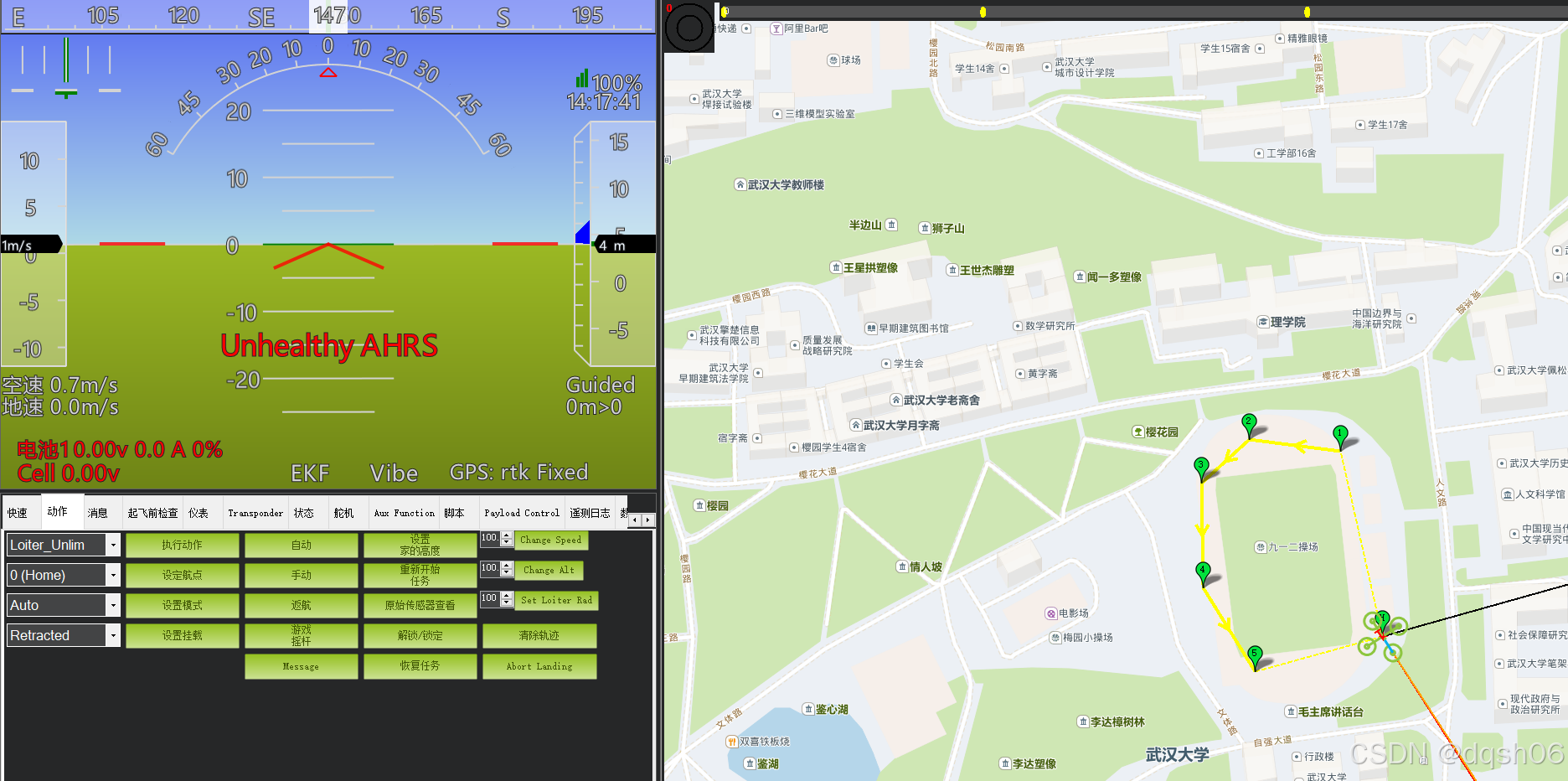
可以看到HUD的空速是0.7m/s,高度升到4m了。
然后,点【自动】,飞行器将按照waypoint自动飞行。
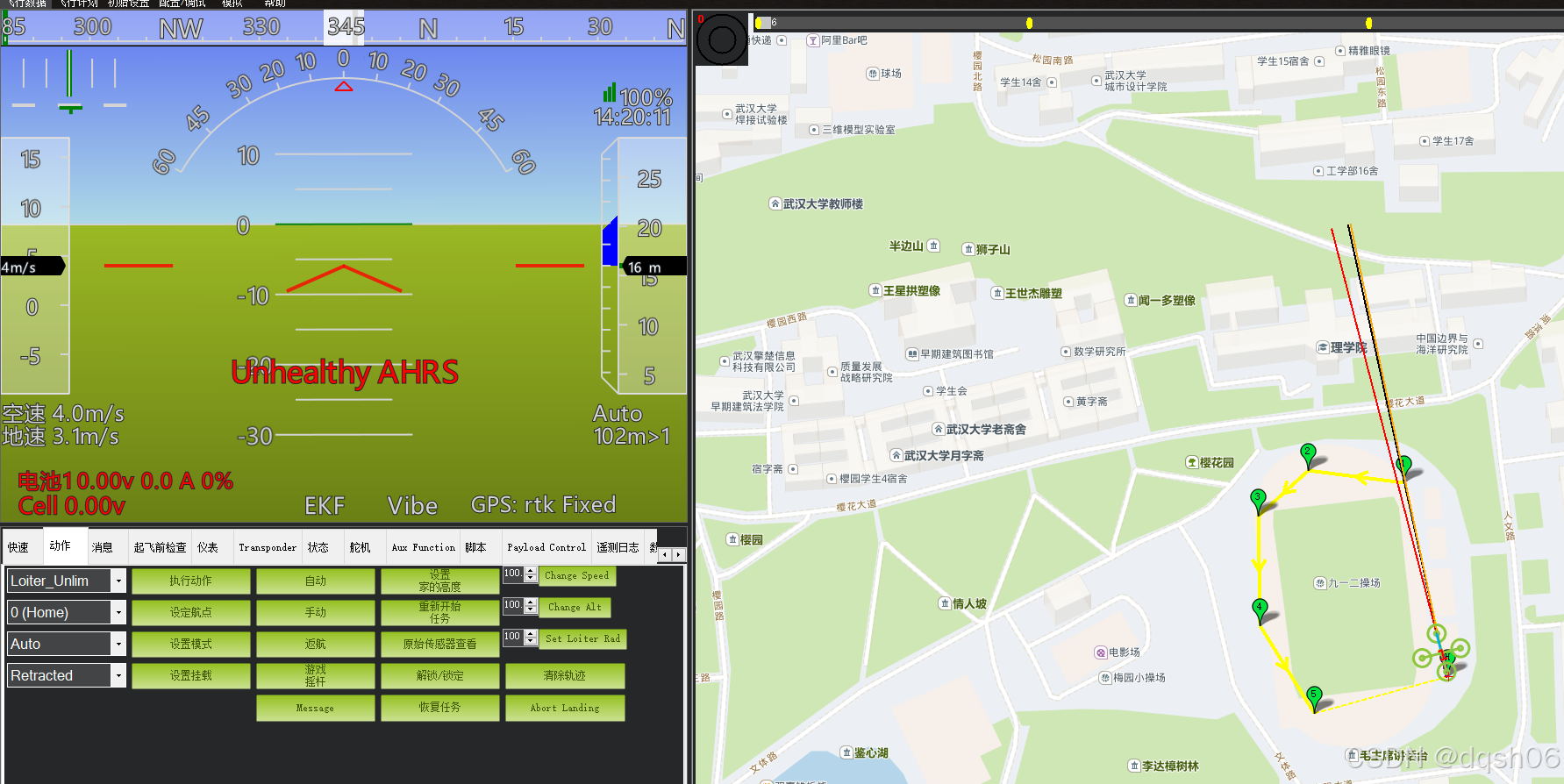
可以看到空速 4.0m/s, 地速3.1m/s, 高度已经到了16m了。
此时,已经开始升高飞行了。
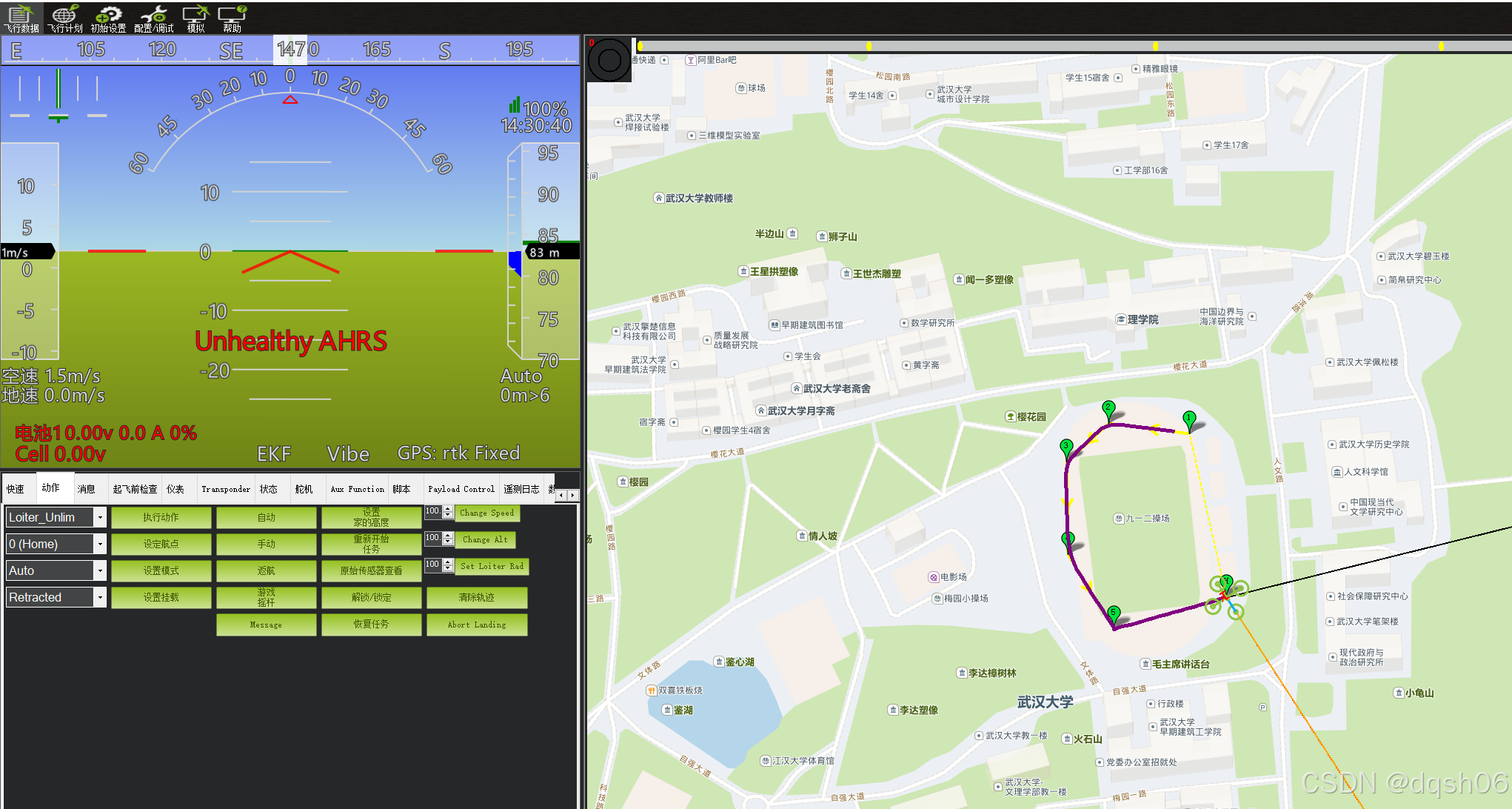
看看飞行轨迹。
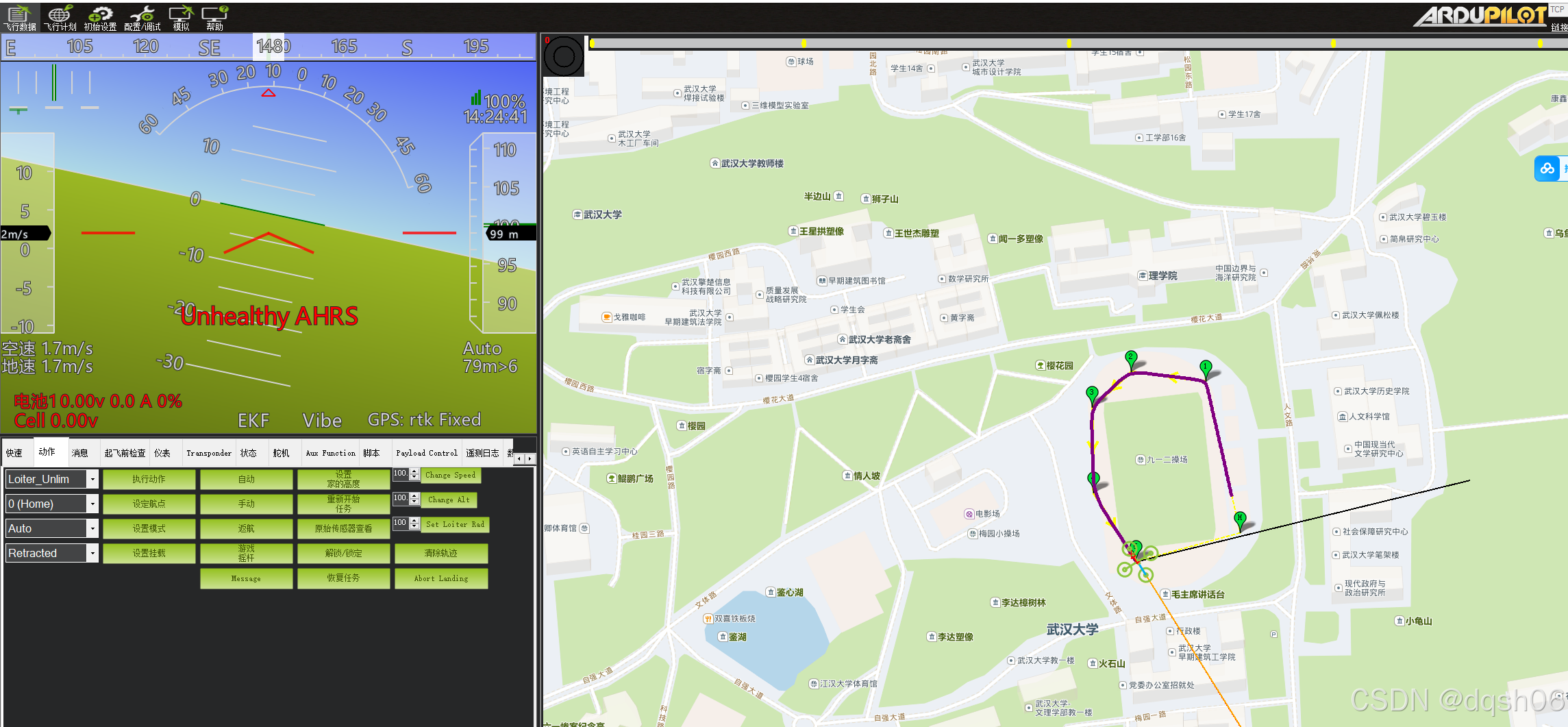
可以看到,此时的空速为1.7m/s, 地速为1.7m/s,高度99m. 左边HUD上的地空线已经有12°的倾斜,兄弟,你已经遨游天空了。
已经飞回了起飞点,在以1.5m/s的速度,降落了。
至此,飞行完成。
3. 大功告成。
【注】如果在国外飞的话,好像会收到FAA的飞行许可。

















 1197
1197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









