






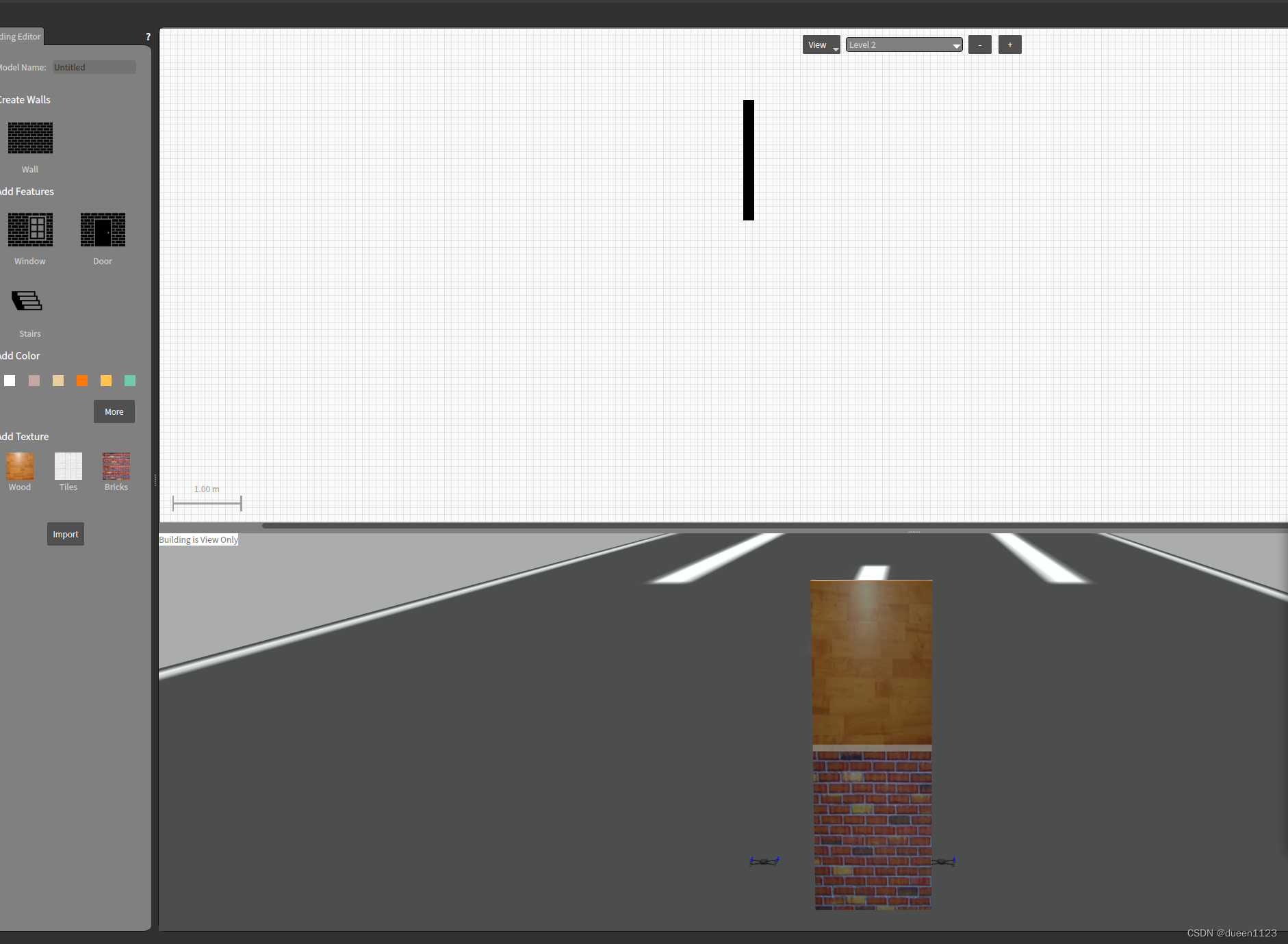
- control + B 打开建立墙体界面
- 然后画墙体x和y的位置,点击右键暂停画图
- 然后选择左侧贴图
- z由上图编辑界面的level1和level2决定,添加level2画第二层墙体
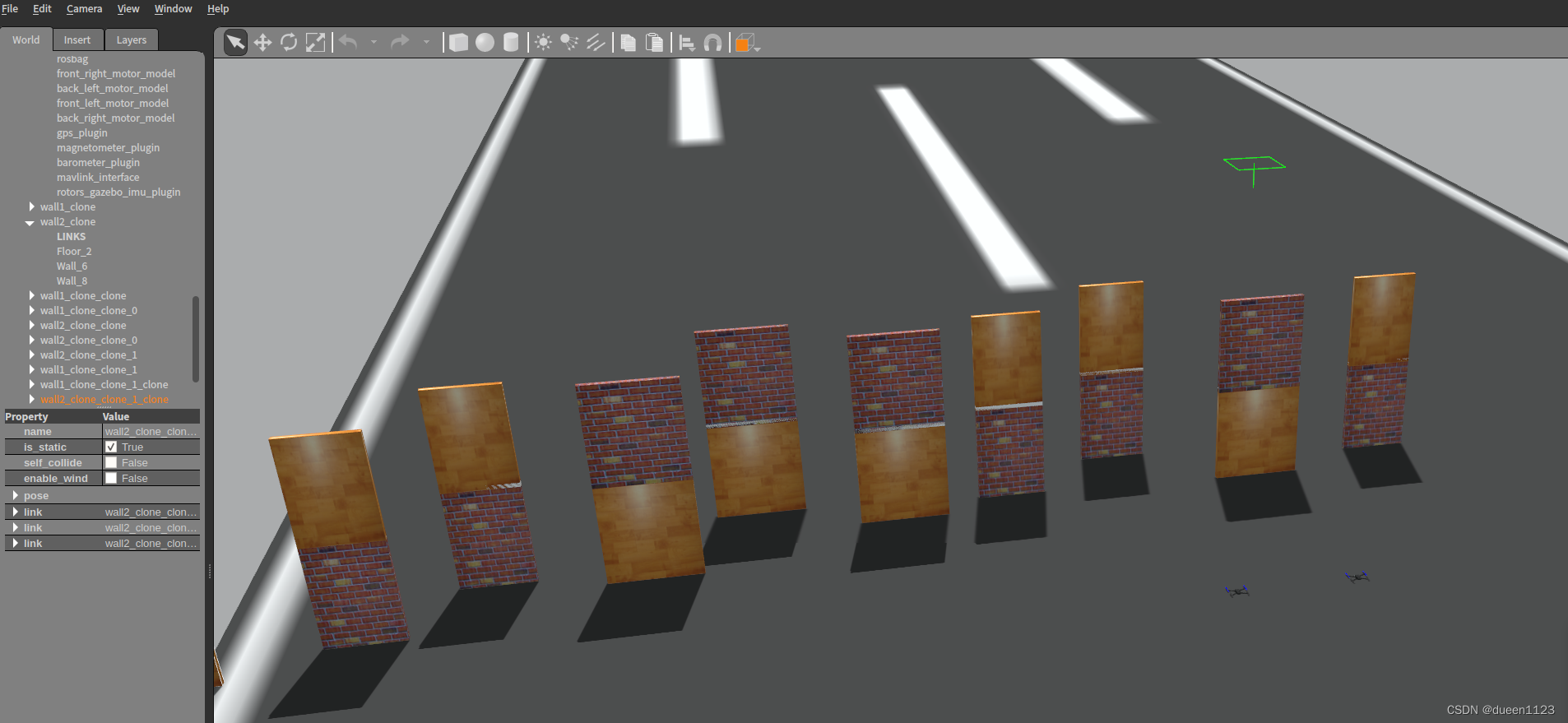
- control + x 退出,并选择save and exit保存模型
- 编辑完成后,选择file-save world as保存创建的世界
一个简单的障碍物场景就建立好啦~
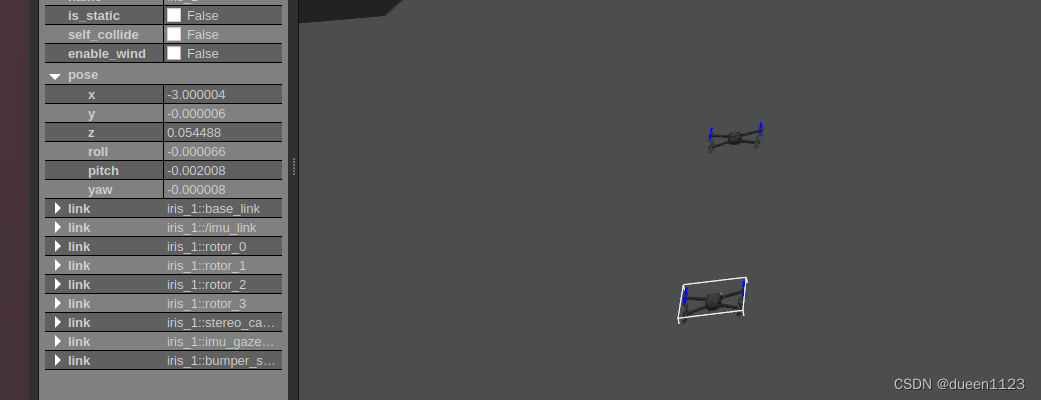
注意:这里有一个bug,无人机的位置其实应该写在launch文件中的,但是这样会在world中也保存uav的模型,导致launch不能更改无人机位置了;若想直接更改无人机位置,可以选择在代码直接编辑修改world文件
若要解决这个问题,在图形化界面中选择无人机,直接修改其位置(如下),然后再次保存该world文件
相机模型深度修改
在realsense_camera.sdf中修改以下两部分
<clip>
<near>0.05</near>
<far>30</far>
</clip>
<pointCloudCutoff>0.05</pointCloudCutoff>
<pointCloudCutoffMax>30</pointCloudCutoffMax>
请注意,上面是修改彩色相机的深度,下面点云部分才是修改深度图像的深度,
但一般彩色图像会获得更深的深度,深度相机才有深度限制,因此改为
<clip>
<near>0.05</near>
<far>100</far>
</clip>
<pointCloudCutoff>0.05</pointCloudCutoff>
<pointCloudCutoffMax>20</pointCloudCutoffMax>















 300
300

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









