







简介
这是一个Gazebo仿真环境下利用UR5机械臂和realsense相机进行手眼标定的教程(眼在手上)。
准备相关文件
# UR5
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git Universal_Robots_ROS_Driver
git clone -b calibration_devel https://github.com/fmauch/universal_robot.git fmauch_universal_robot
# aruco
git clone -b noetic-devel https://github.com/pal-robotics/aruco_ros.git
# vision_visp
git clone -b noetic-devel https://github.com/lagadic/vision_visp.git
# easy_hand_eye
git clone https://github.com/IFL-CAMP/easy_handeye
# realsense_ros_gazebo
git clone https://github.com/rickstaa/realsense-ros-gazebo.git
需要先创建个运行空间,然后下载好这五个文件,将realsense_ros_gazebo文件夹移动到universal_robot文件夹下
之后就是catkin_make编译下,source更新下环境。
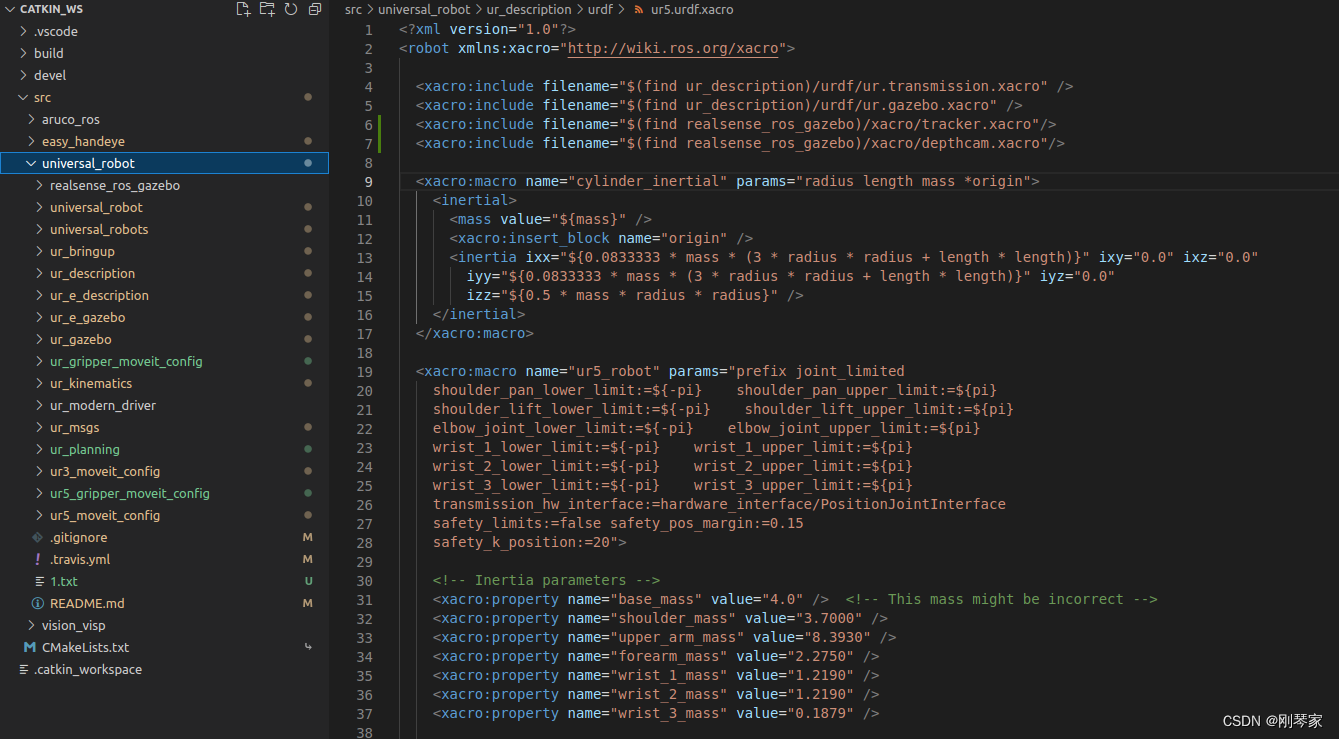
修改UR5机械臂文件为其添加realsense相机
在/…/universal_robot/ur_description/urdf文件夹下找到ur5.urdf.xacro文件。对其进行修改
在此文件的开头处插入下列两行代码
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/tracker.xacro"/>
<xacro:include filename="$(find realsense_ros_gazebo)/xacro/depthcam.xacro"/>
在此文件的后半部分插入下列代码
<link name="support">
<visual>
<geometry>
<cylinder radius="0.02" length="0.03" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="red">
<color rgba="0.8 0.2 0.0 0.8" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.02" length="0.03" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
</link>
<joint name="support2wrist_3_link" type="fixed">
<parent link="${prefix}wrist_3_link" />
<child link="support" />
<origin xyz="0 0.05 0.06" />
</joint>
<gazebo reference="support">
<material>Gazebo/White</material>
</gazebo>
<xacro:realsense_d435 sensor_name="d435" parent_link="support" rate="10">
<origin rpy="0 0 0 " xyz="0 0 0.02"/>
</xacro:realsense_d435>
查看相机与机械臂的结合情况
执行下列指令
#打开UR5机械臂的Gazebo仿真环境
roslaunch ur_gazebo ur5.launch
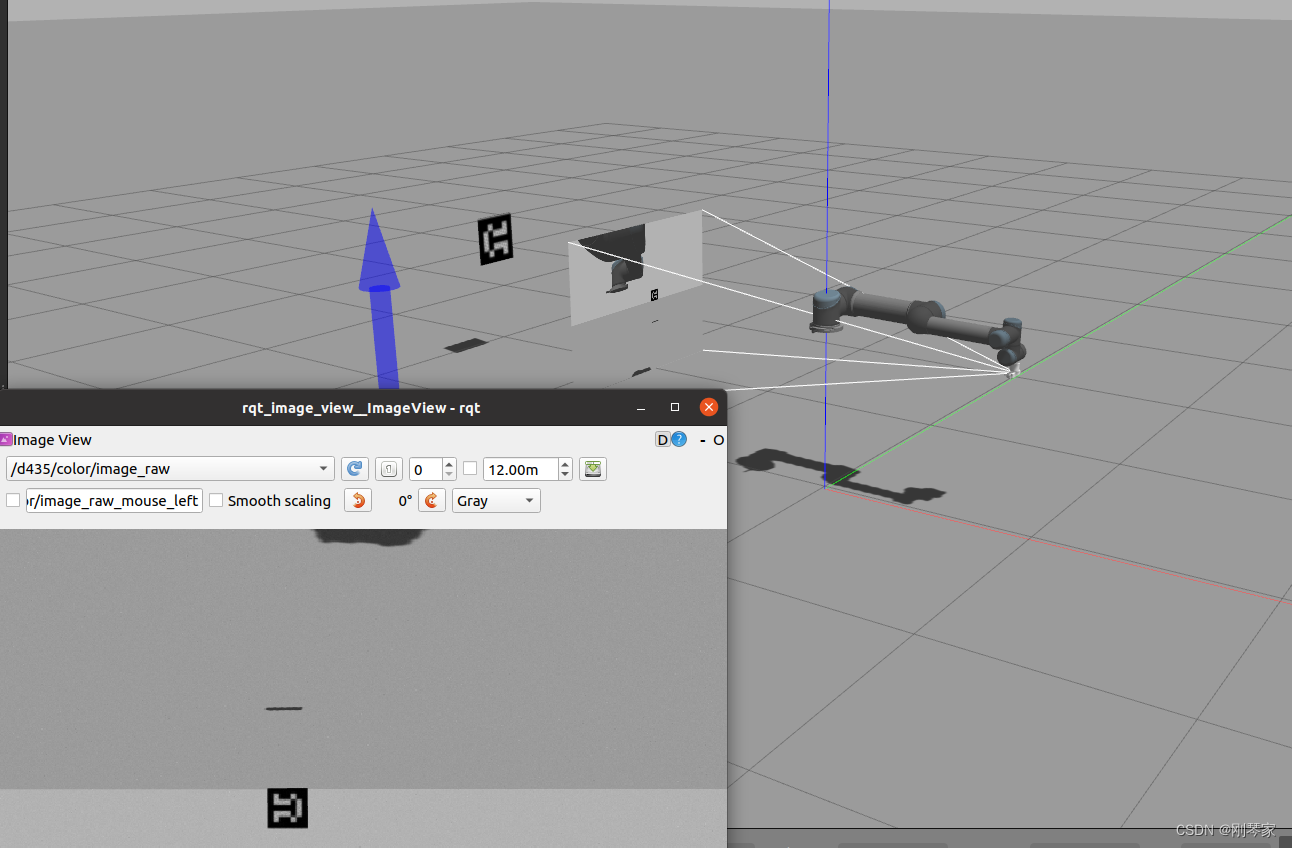
这个可以看到相机已经固定在机械臂上端了,并且通过rqt查看可以观测到相机的视野。
这里相机观测到aruco码,这里的aruco码制作教程在我发表的其他文章里,自行查找学习制作。
创建手眼标定文件
在/home/tza/catkin_ws/src/easy_handeye/easy_handeye/launch目录下,创建手眼标定文件。
这里我创建了ur5_kinect_calibration.launch文件。
<launch>
<arg name="namespace_prefix" default="ur5_kinect_handeyecalibration" />
<arg name="robot_ip" doc="The IP address of the UR5 robot" />
<arg name="marker_size" doc="Size of the ArUco marker used, in meters" default="0.1"/>
<arg name="marker_id" doc="The ID of the ArUco marker used" default="582"/>
<!-- start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/d435/color/camera_info" />
<remap from="/image" to="/d435/color/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="$(arg marker_size)"/>
<param name="marker_id" value="$(arg marker_id)"/>
<param name="reference_frame" value="d435_link"/>
<param name="camera_frame" value="d435_color_frame"/>
<param name="marker_frame" value="camera_marker" />
</node>
<!-- start the robot -->
<include file="$(find ur_gazebo)/launch/ur5.launch">
<arg name="limited" value="true" />
</include>
<include file="$(find ur5_moveit_config)/launch/ur5_moveit_planning_execution.launch">
<arg name="limited" value="true" />
<arg name="sim" value="true" />
</include>
<include file="$(find ur5_moveit_config)/launch/moveit_rviz.launch">
<arg name="config" value="true" />
</include>
<!-- start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="start_rviz" value="false" />
<arg name="eye_on_hand" value="true" />
<arg name="tracking_base_frame" value="d435_color_frame" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="base_link" />
<arg name="robot_effector_frame" value="wrist_3_link" />
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>
</launch>
这里与easy_handeye官方提供的例子有所不同,因为不需要使用到实际的相机,所以就不需要启动实际的相机文件。
在启动UR5机械臂的时候,已经将UR5机械臂和相机一起启动了。
并且这里的机械臂启动文件也与官方提供的例子有所不同。记得注意甄别。
在启动easy_handeye这里,需要对这里进行更改,一个是关闭rviz,另外一个是进行眼在手上设置。
<arg name="start_rviz" value="false" />
<arg name="eye_on_hand" value="true" />
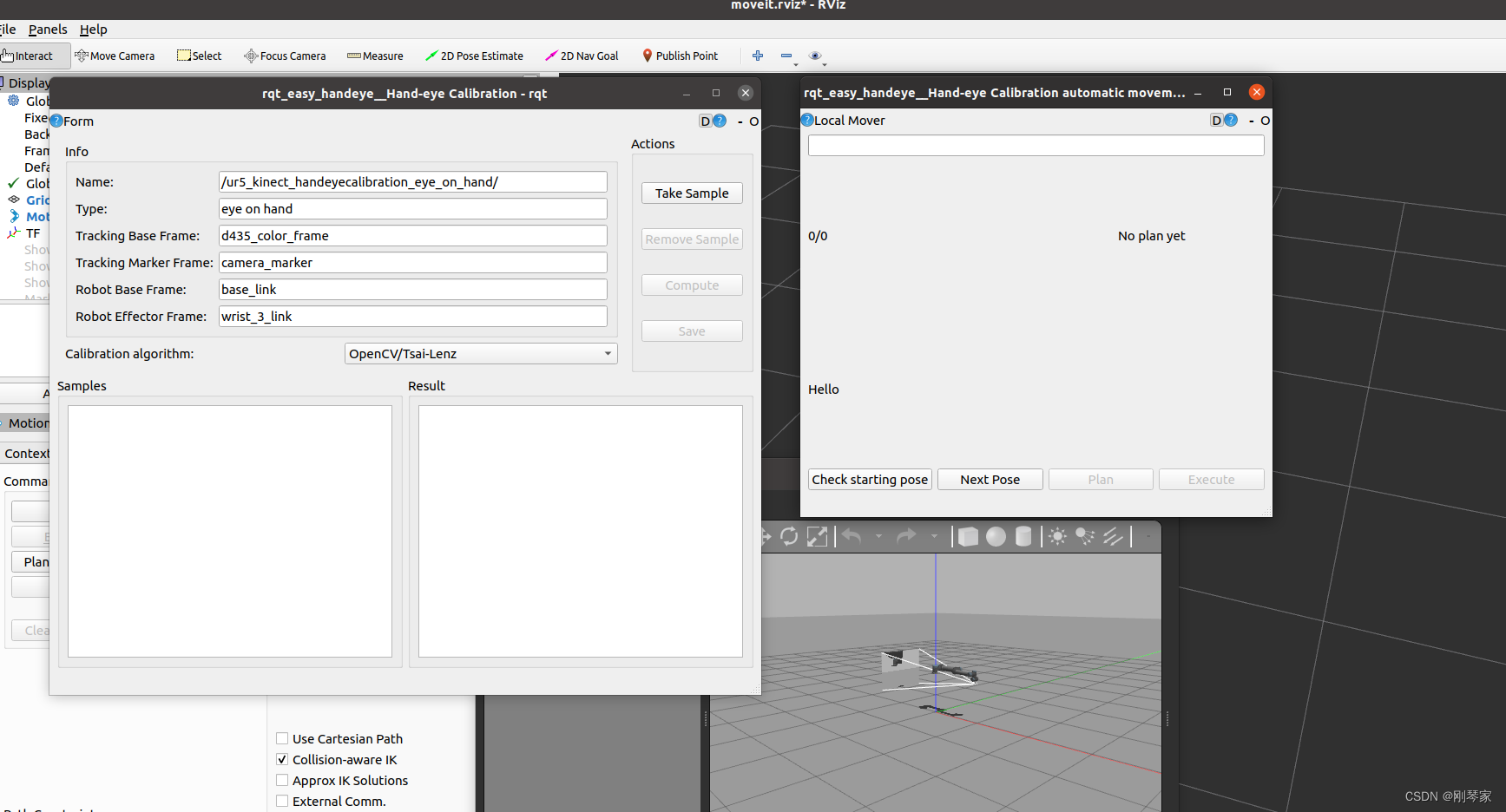
启动文件进行手眼标定
执行下列指令
roslaunch eye_handeye ur5_kinect_calibration.launch
程序将会打开Gazebo界面,rviz界面,和rqt_easy_handeye界面。
此时Gazebo里没有aruco码,需要自行配置插入aruco码,
之后就可以进行机械臂的标定工作了。
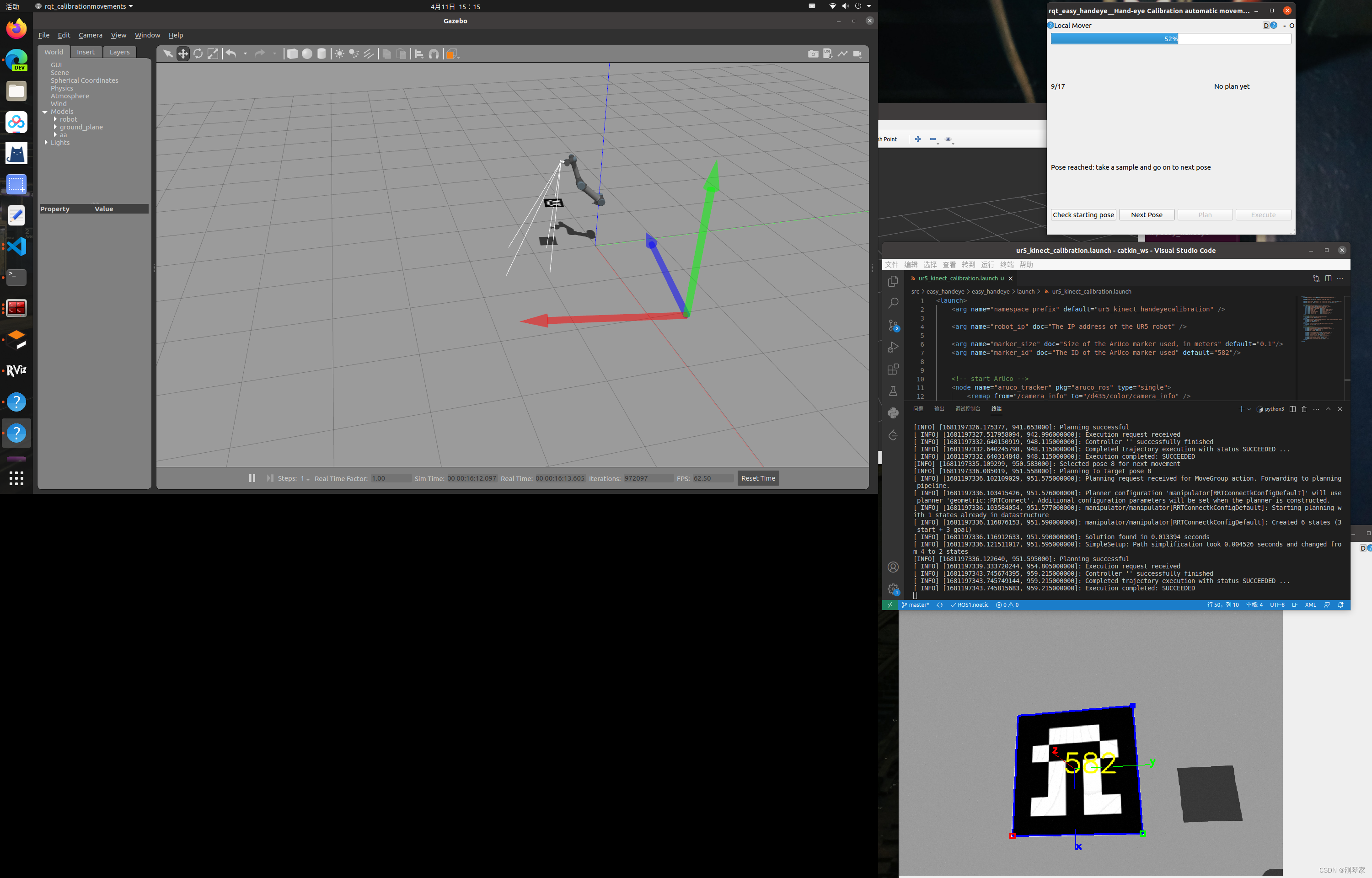


最终经过多次标定 程序就会自动生成变换矩阵。便可以推断出相机坐标系与机械臂坐标系之间的转换关系。















 898
898











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









