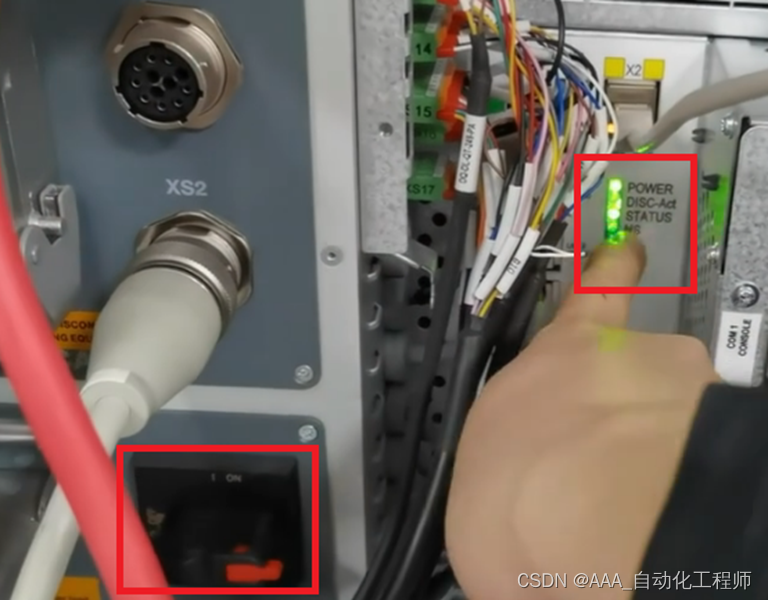
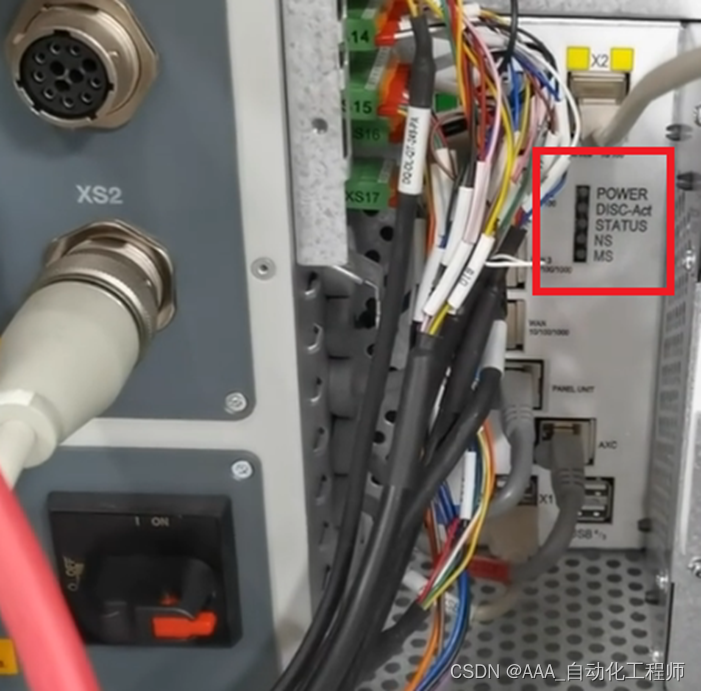
ABB机器人示教器触摸屏重新校准及操纵杆初始化的具体方法 当示教器的触摸屏点击时不是很准时,可以重新进行校准;同样的,操纵杆也可以进行重新初始化。 具体的操作步骤可以参考以下内容: 如下图所示,首先,关闭控制柜的电源,然后等待下图中的指示灯熄灭, 如下图所示,待指示灯熄灭后,再等待10秒钟,让控制柜内的电容充分放电, 重新给控制柜上电,然后同时按住可编程按键的4号键+停止键&


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本教程详细介绍了ABB机器人示教器触摸屏的重新校准和操纵杆初始化过程。首先,需关闭控制柜电源并等待电容放电,接着在重新上电的同时按住4号键+停止键,启动过程中清除校准数据。随后,按照系统引导进行触摸屏四个角落的校准和操纵杆的六个方向操作。完成校准后,系统会同步控制器文件并重启,确保触摸屏和操纵杆恢复正常工作。
本教程详细介绍了ABB机器人示教器触摸屏的重新校准和操纵杆初始化过程。首先,需关闭控制柜电源并等待电容放电,接着在重新上电的同时按住4号键+停止键,启动过程中清除校准数据。随后,按照系统引导进行触摸屏四个角落的校准和操纵杆的六个方向操作。完成校准后,系统会同步控制器文件并重启,确保触摸屏和操纵杆恢复正常工作。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1744
1744







