







ABB机器人有时会报代码为20032的错误,该错误是机器人转数计数器未校正/数据丢失造成的,是机器人的致命错误,不解决该故障机器人就不能自动运行。
前言
ABB机器人使用绝对值编码器来确定自身位置状态,由于减速比的缘故,机器人手臂旋转180°,电机轴旋转角度实际会旋转数圈,故机器人需要校准零位置时圈数数据。
机器人圈数数据记录在串行测量板(SMB板)上,SMB板在机器人本体上,每次开机上电时通过通讯电缆将数据传递给控制器。
新机首次调试、更换SMB电池时,拆卸本体电机或者减速齿轮时,或其他情况下造成的计数器数据丢失时,圈数计数器需要重新校零。
一、准备
- 打在手动界面;
- 待矫正的轴的零刻度线需要对齐;
- 如果机器人本体周围存在位置干涉,可以分组多次矫正;
- 其他需要注意的事项。
二、校准步骤
在机器人控制器的控制板上的钥匙旋钮打到手动模式;

图 1打在手动
在示教器上,点击左上角蓝色标志,找到【校准】选项,点击进入;
|
|
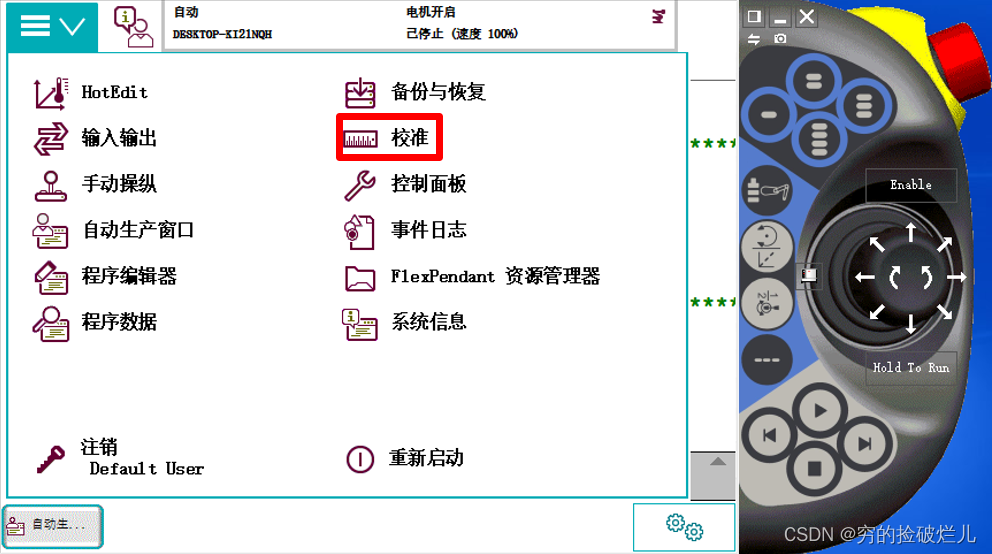 图 2选择【校准】
图 2选择【校准】如下图所示,选择【手动方法】,进入手动校零模式;
|
|
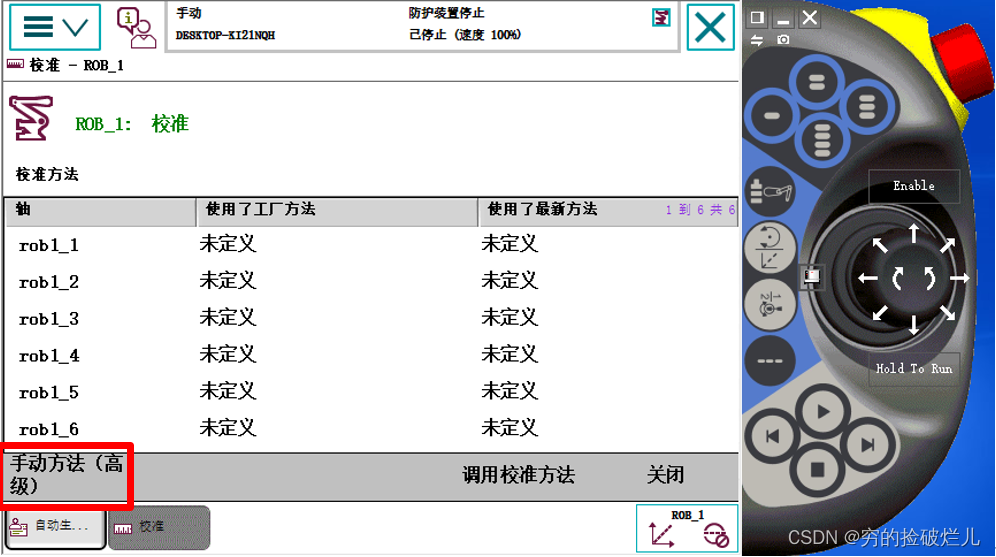 图 3选择【手动方法(高级)】
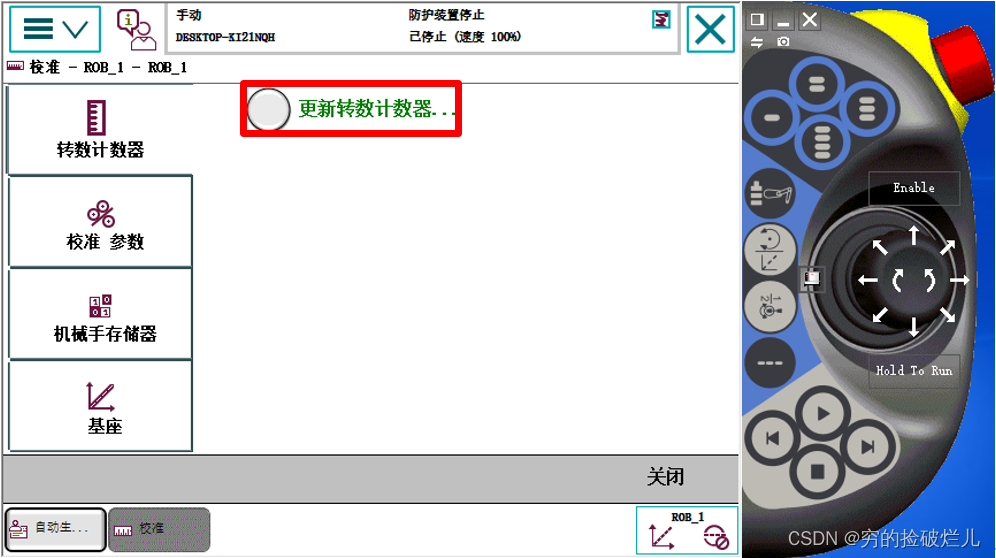
图 3选择【手动方法(高级)】在下图所示界面,选择【更新转数计数器…】
|
图 4选择【更新转数计数器...】 |
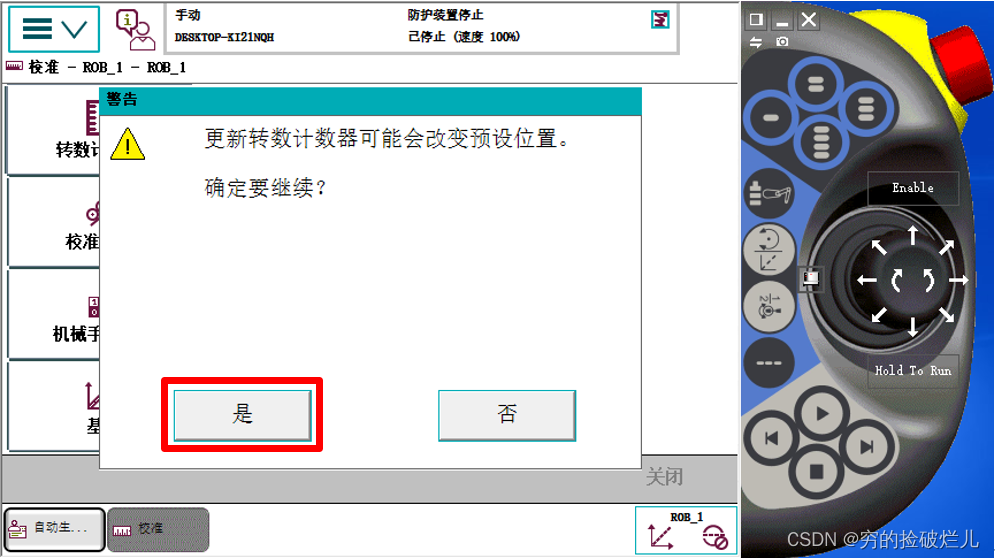
重新校准会覆盖掉原有数据,继续操作则在弹窗中选择【是】
|
图 5选择【是】 |
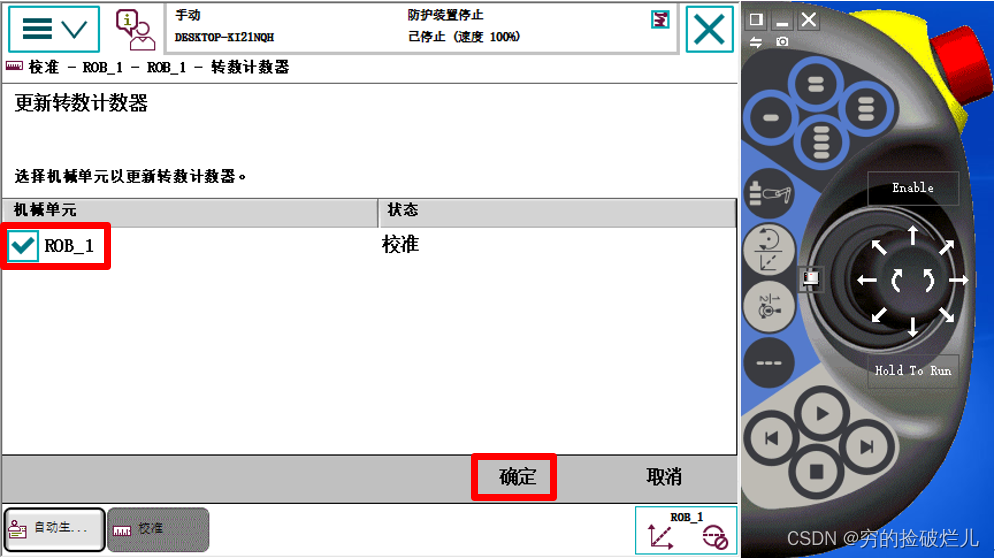
选择【ROB_1】,点击【确定】;
|
图 6选择【确定】 |
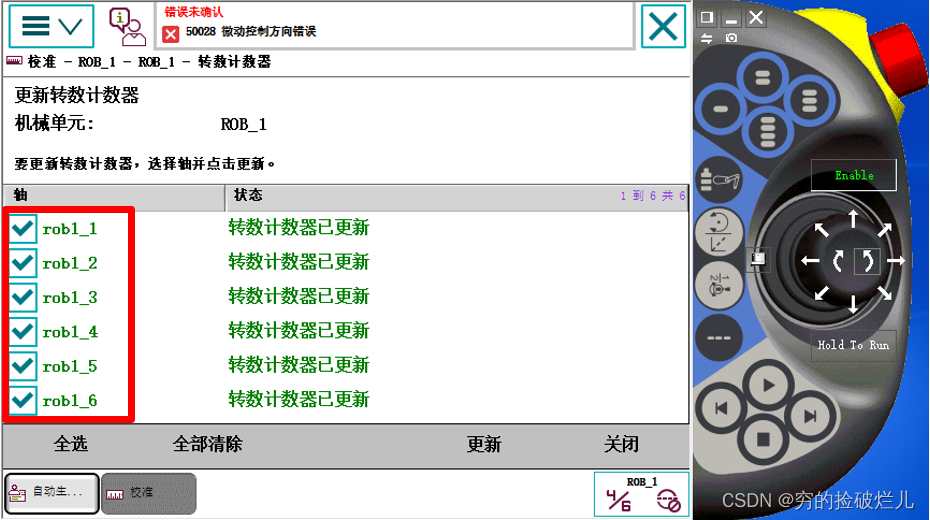
勾选1-6轴(实际未完成矫正前转数计数器状态显示为未矫正)
|
图 7选择需要校准的轴,新设备需要全部重新校准 |
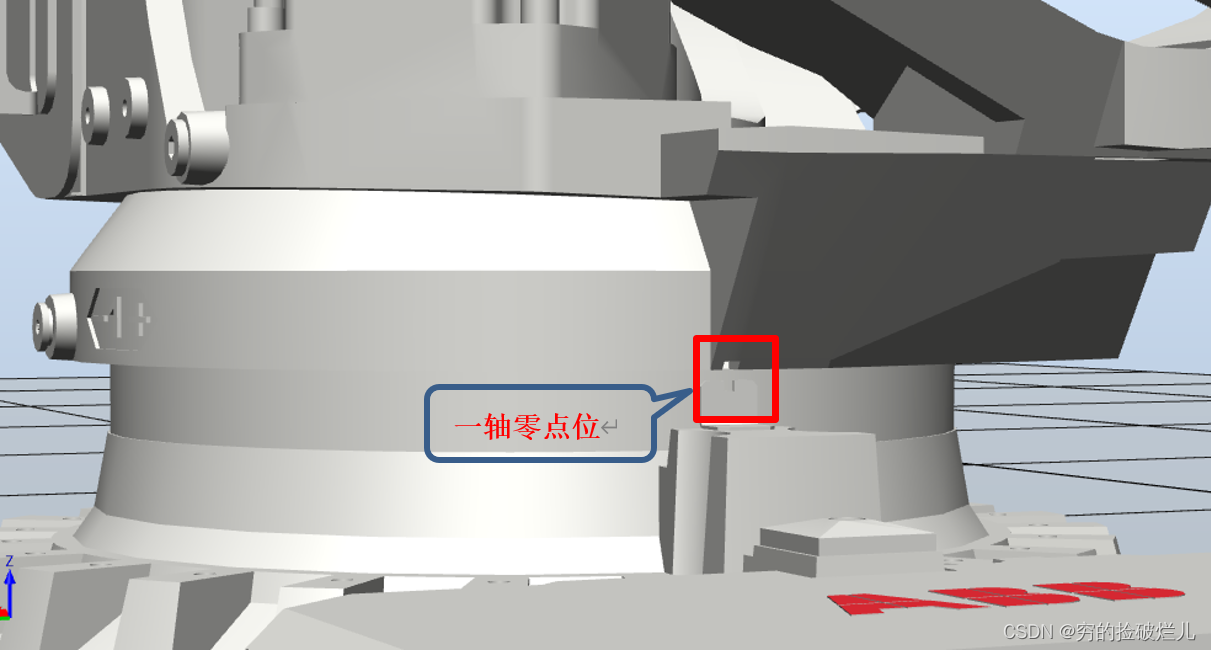
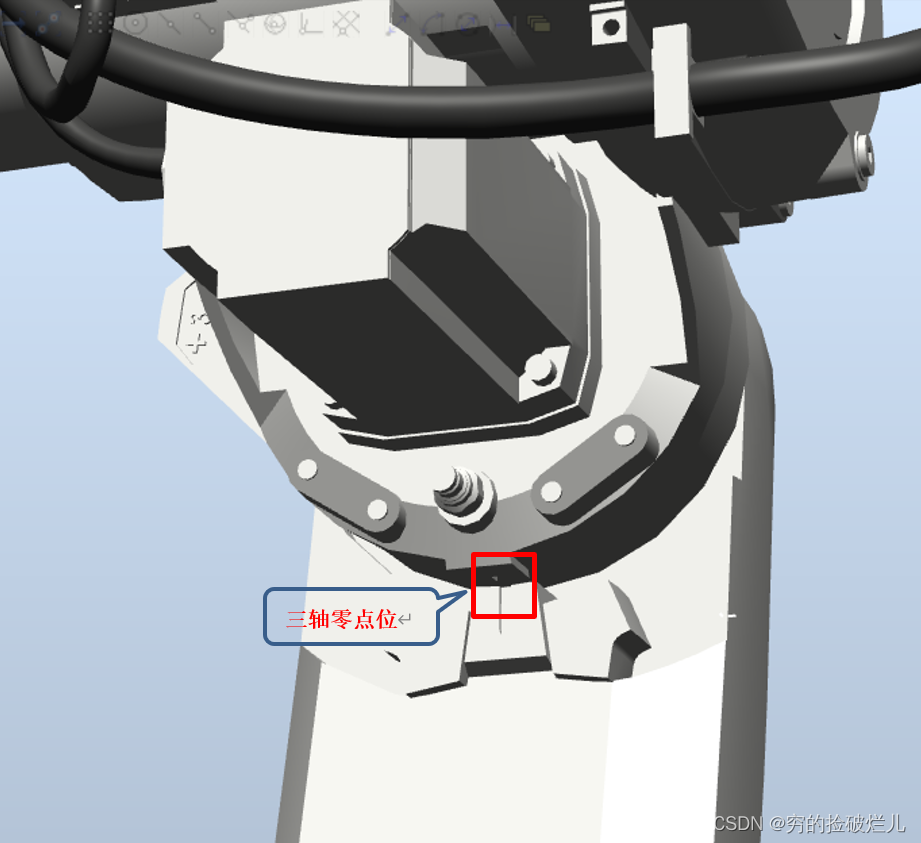
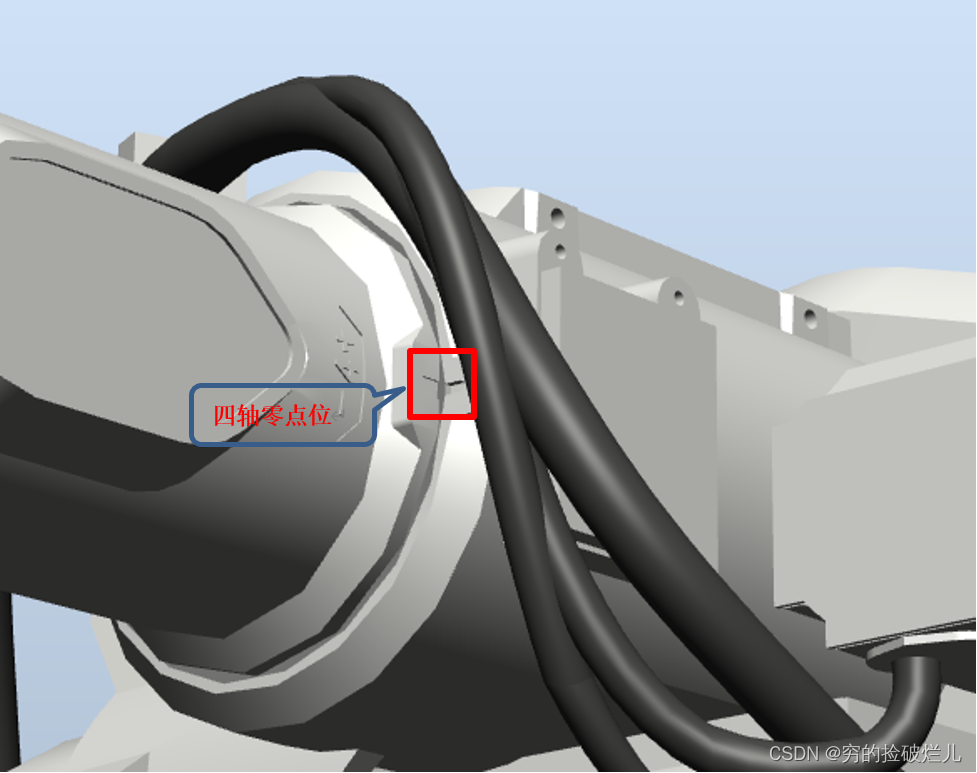
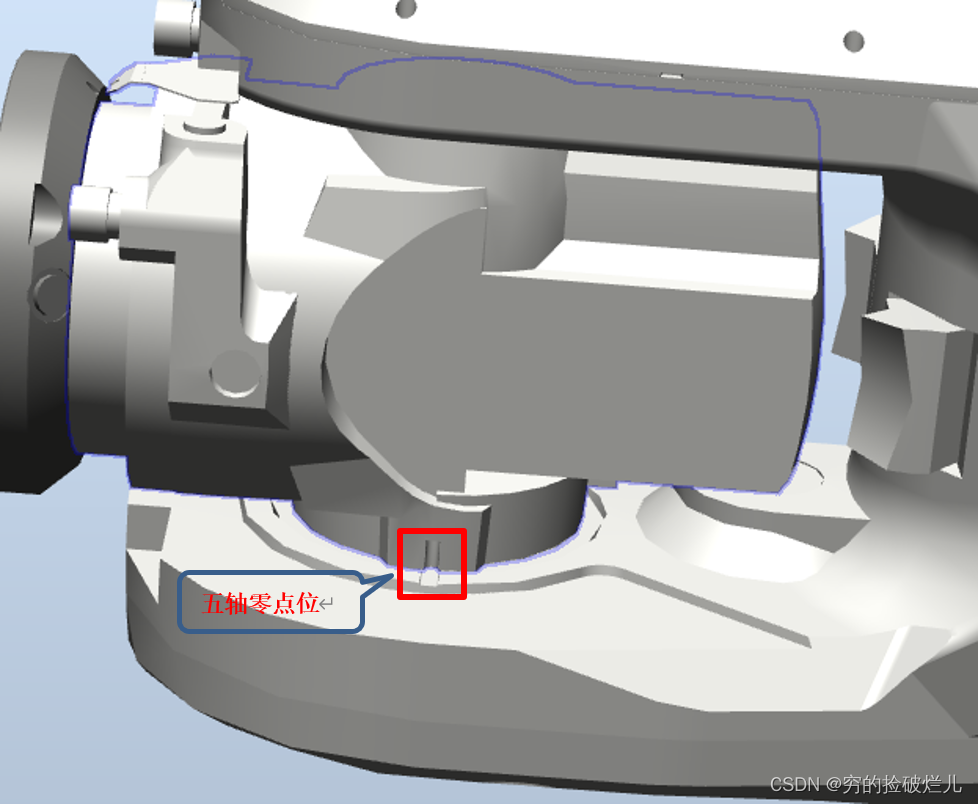
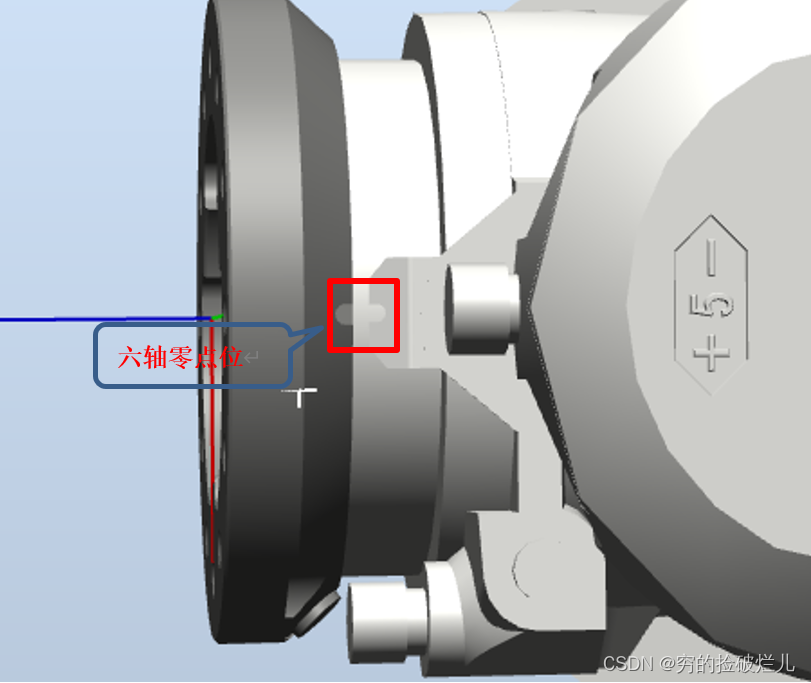
切换单轴控制模式,控制各轴运行,使两相对组件上的零刻度对齐完成各轴回零姿态。
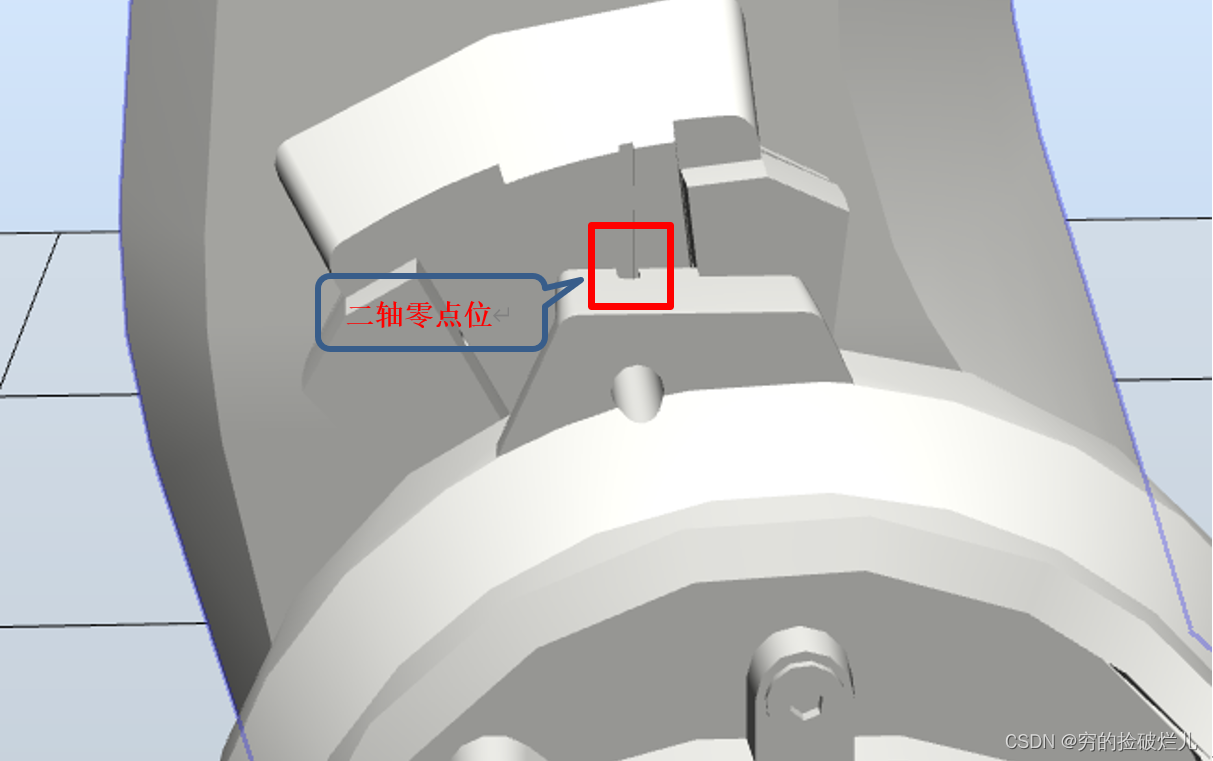
各零点刻度位置如下:
|
一轴零点位 |
|
二轴零点位 |
|
三轴零点位 |
|
四轴零点位 |
|
五轴零点位 |
|
六轴零点位 |
各轴完成回零后的姿态如下所示:

完成各轴位置回零后,点击【更新】,弹窗中再次选择【更新】,稍等数分钟;
|
|
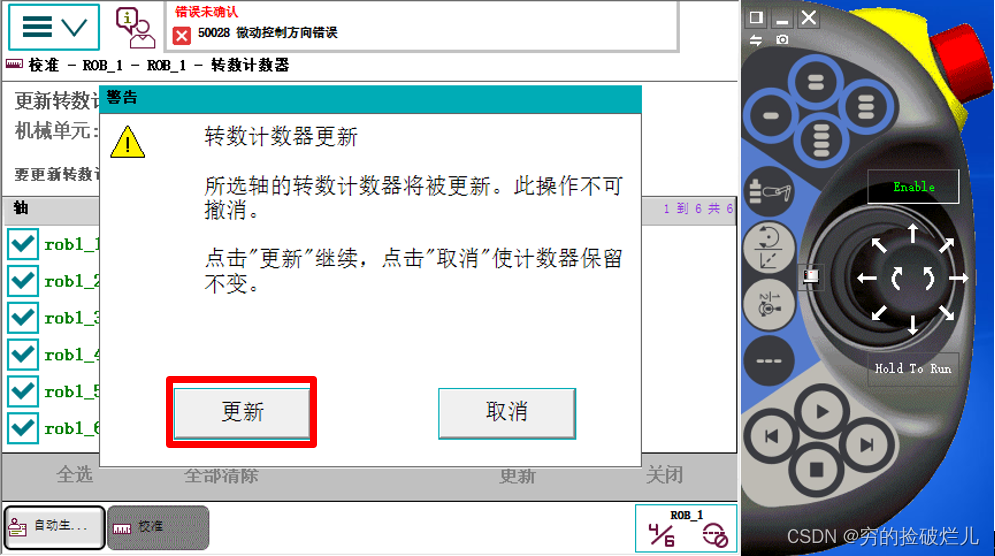 图 8更新数据
图 8更新数据更新完成后选择【关闭】,完成位置校零操作
|
|
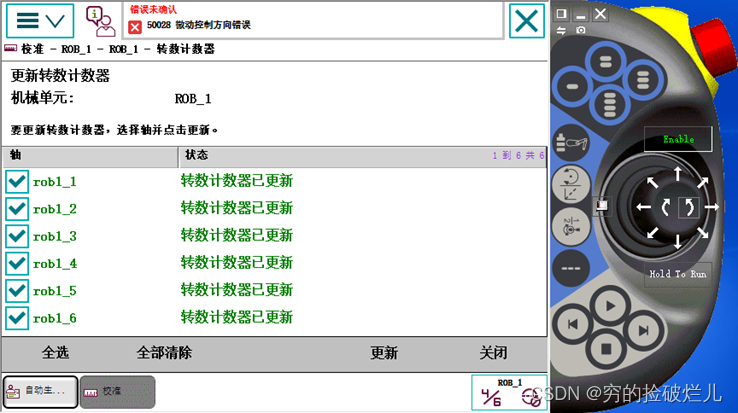 图 9完成校准
图 9完成校准结束语
几乎每一台新机器在拆机后都需要做一遍计数器圈数矫正操作,文中以IRB6700-150为例使用RobotStudio编程仿真软件做了操作示范。


















 3306
3306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











