







 本文详细分析了用于相机标定的CALTag的MATLAB源代码,从灰度图的二值化到连通区域的计算与过滤。首先介绍二值化过程,采用自适应阈值方法,并通过形态学处理去除噪声。接着讨论过滤连通区域的策略,包括基于面积和欧拉数的标准,以区分真实标记和背景噪声。过滤后的连通区域展示了欧拉数的应用。
本文详细分析了用于相机标定的CALTag的MATLAB源代码,从灰度图的二值化到连通区域的计算与过滤。首先介绍二值化过程,采用自适应阈值方法,并通过形态学处理去除噪声。接着讨论过滤连通区域的策略,包括基于面积和欧拉数的标准,以区分真实标记和背景噪声。过滤后的连通区域展示了欧拉数的应用。
CALTag的源代码(MATLAB)可以从如下网址下载:
https://github.com/brada/caltag
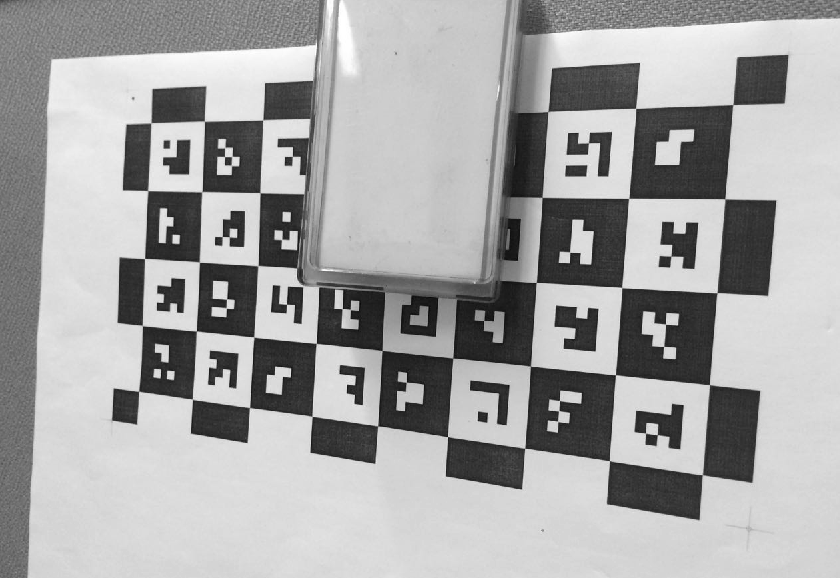
下面以一幅被遮挡的图I为例进行代码的详细分析:
1、 灰度图的二值化,计算连通区域
输入的灰度图为I,显示如下
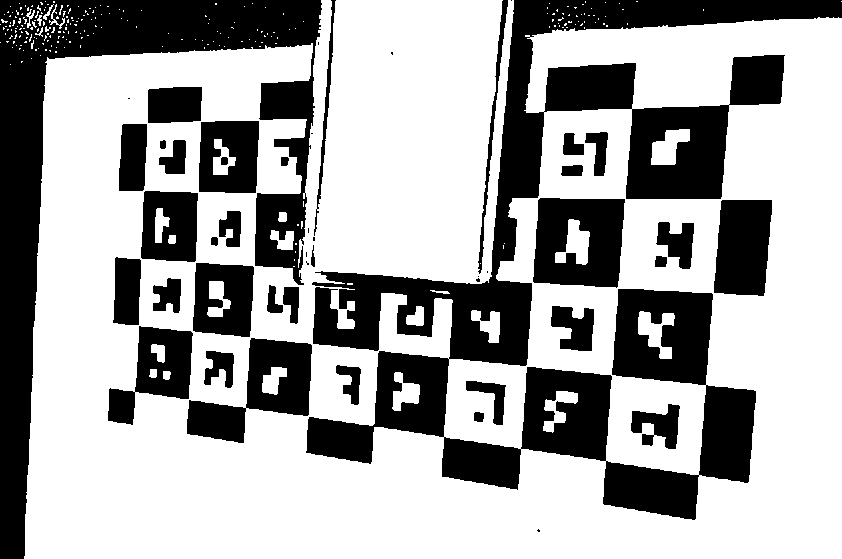
二值化方法是基于Peter Kovesi在http://www.csse.uwa.edu.au/~pk/Research/MatlabFns/提供的adaptive thresholding方法。
T = adaptivethresh( I ); 显示自适应二值化后的图像T:
用sobel算子检测边缘得到E,然后做了简单的形态学处理,去掉一些杂散的点,对应的代码如下
E = edge(  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 382
382

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









