







接着上一篇基于生长的棋盘格角点检测方法–(2)代码详解(上),来看一下第二个重要函数chessboardsFromCorners。
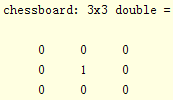
该函数的目的是用上一步骤中找到的角点恢复出棋盘结构。首先初始化一个3x3的角点矩阵,也就是一个 2x2的棋盘格,这是组成一个棋盘的最小单位了。然后利用定义的棋盘能量函数来从4个外沿生长棋盘格,取其中能量最小(最可能是棋盘)的方向作为新的棋盘,以此类推,最后得到一个最优化的棋盘格阵列。
该函数的主要结构:
chessboards = chessboardsFromCorners(corners);
chessboard = initChessboard(corners,i);
energy = chessboardEnergy(chessboard,corners)
proposal{j} = growChessboard(chessboard,corners,j);
pred = predictCorners(p1,p2,p3)
idx = assignClosestCorners(cand,pred);initChessboard
初始化一个3x3的chessboard为0,选取第idx个Corner,其两个主梯度方向为v1,v2,将该Corner作为chessboard的初始中心。如下图
然后以此角点为中心,按照两个主梯度方向寻找最近的邻居角点。
directionalNeighbor
function [neighbor_idx,min_dist] = directionalNeighbor(idx,v,chessboard,corners)其中,v是归一化方向向量。该函数计算当前点和其他所有点的距离向量dir、其他点在该点主方向上的投影距离dist。
dir = corners.p(unused,:) - ones(length(unused),1)*corners.p(idx,:);
dist = (dir(:,1)*v(1)+dir(:,2)*v(2));参考下图看一下其中一些重要参数的物理意义:
dist*v 表示其他点在该点梯度向量方向上的投影向量。
dist_edge表示其他点到该点梯度向量v方向的垂直距离。
dist_point(dist_point<0) = inf;表示其他点和该点的方向夹角大于90度,点乘为负的情况下认为是无穷远。
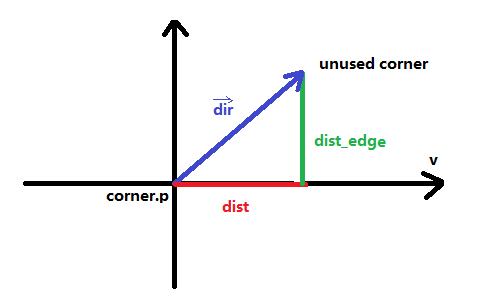
dist_edge为对应点到棋盘中心点边缘方向的垂直距离。
dist为投影距离,考虑到我们希望寻找对应v方向的最近点,因此对dist_edge的值进行一个放大。代码中进行了5倍的放大,如下:
[min_dist,min_idx] = min(dist_point+5*dist_edge);
neighbor_idx = unused(min_idx);寻找米字形的3x3九宫格(上、下、左、右、左上、左下、右上、右下)内所有点最近的邻居。代码如下
% find left/right/top/bottom neighbors
[chessboard(2,3),dist1(1)] = dire 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









