







卡尔曼滤波
主要用到高斯函数以及高斯加法和乘法
高斯函数在高中又名正态分布:

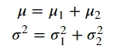
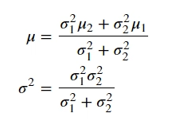
高斯加法: 高斯乘法:
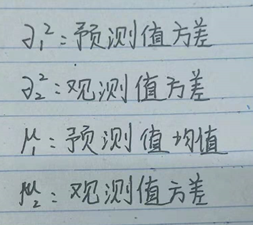
∂:标准差, u:均值 ,∂^2:方差
高斯乘法):已观测
感知过程符合贝叶斯法则,是乘积过程,即采用概率分布相乘
贝叶斯公式就是当已知结果,问导致这个结果的第i原因的可能性是多少?执果索因!
高斯加法):未发生
预测过程符合全概率法则,是卷积过程,即采用概率分布相加
全概率就是表示达到某个目的,有多种方式(或者造成某种结果,有多种原因),问达到目的的概率是多少(造成这种结果的概率是多少)
总结:当一个位置小车经过移动后,且其定位和移动过程都是高斯分布时,其最终估计位置分布会更分散,即更不准确;当一个小车经过传感器观测定位,且其定位和观测都是高斯分布时,其观测后的位置分布会更集中,即更准确。
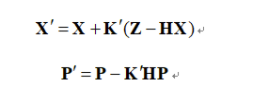
卡尔曼更新:
卡尔曼增益:
主要表示 预测结果 和测量结果的权重依赖
由于是结果体现,因此运算为高斯乘法分解:
u为高斯乘法后的均值

K则是卡尔曼增益,可以理解为选取预测和测量的权重选择
通常式子为:![]()
卡尔曼更新:均值和方差

通常式子为:
协方差:
1.状态协方差P
2.过程误差协方差Q
3.测量噪声协方差R
通常协方差可以表示多维数据的关系
(该部分较容易理解,可自行查找)















 7980
7980











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









