







之前也进行过智能优化问题的学习,但当时只局限于算法的过程和框架,没去思考具体的应用,因此在实际问题中常常想不起来智能优化这个方法。所以这次看了有关几篇涉及基于智能优化算法的多智能体任务分配的论文,学习一下他人的做法,明晰自己的思路。
一、综述类
本文没有具体提出某种算法,主要是介绍了多无人机协同编队飞行中的任务分配、航迹规划、编队控制、通信组网和感知、数据融合等技术的现状和进展,重点是介绍了编队控制。不过引用了很多任务分配的文献,可以学习。
本文归纳出常见约束条件和评价指标,从集中式和分布式角度详细阐述了任务分配问题的常见模型与求解算法,还提出针对约束耦合、子问题耦合、分层结构耦合的解耦策略。
任务规划问题可以用五元组![]() 进行数学表示,其中具体含义为:
进行数学表示,其中具体含义为:
- E是无人机作战环境,包含地理信息、天气情况、威胁分布情况等环境信息。
- U是无人机状态,包含无人机编号、性质、数量、位置、机载资源等信息。
 是当前战场环境中目标的集合。
是当前战场环境中目标的集合。 是当前战场环境中任务的集合。
是当前战场环境中任务的集合。- C表示任务规划中存在的约束条件,包括环境约束条件、无人机运动学和动力学约束、任务约束等约束情况。
在任务规划过程中,需保证每个任务没有被重复分配,即只分配给一架无人机,还需确保每个目标上的所有任务均被执行。(这一点与我要研究的任务分配不太一样)
评价指标有:价值收益最大指标、飞行距离最短指标、任务完成时间最短指标、燃油消耗最少指标、威胁程度最小指标。(针对这种多目标优化问题,通常会将多目标优化问题转化为单目标优化问题进行求解,方法有两种。一是根据目标函数的重要程度分配权重值,聚合为一个加权函数;二是确定一个最终目标,将其他目标转化为约束条件。)
常见的无人机协同控制体系结构包括集中式、分布式、分层式和混合式结构。
(1)集中式
所有无人机与唯一的控制中心建立通信,控制中心可以获取无人机系统的全局信息,通常由长机或者地面控制站担任。

(2)分布式
没有一个确定的控制中心,各无人机均有控制能力且处于同等地位,通过合作的方式协同执行任务。

(3)分层式
具有局部集中特性。系统按照一定规则将多无人机划分为多个编队,再由地面控制站或者长机预先分配任务给各组无人机,各组无人机执行任务时可依据情况进行动态调整。

(4)混合式
由上述几种控制结构混合组成。
协同任务规划可以简化为任务分配和航迹规划两个核心子问题,框架可大体划分为两类:集中式和分层解耦式。图(a)(b)(c)为集中式求解结构,图(d)为分层解耦式求解结构。

分层解耦式求解步骤是预估无人机与目标间的飞行距离并将其作为任务分配过程的输入,在获得可行任务分配结果后,航迹规划过程生成多约束条件下安全合理的飞行轨迹,之后将航迹轨迹结果发送至制导与控制系统。
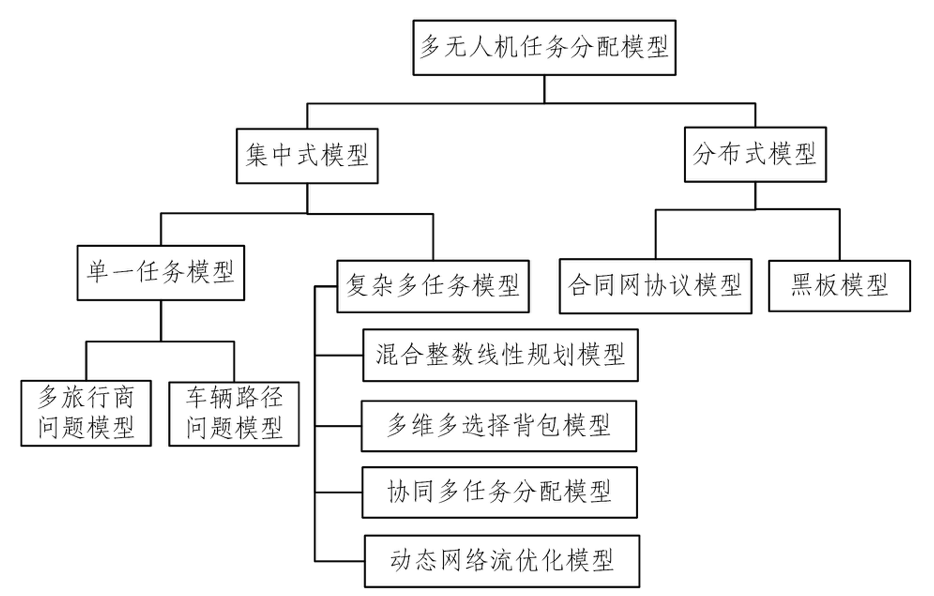
集中式适用于无人机、任务与环境均已知的固定场景;而分布式(分散式、分层式)适用于无人机数量变化灵活、任务与环境不确定的场景。
(1)集中式
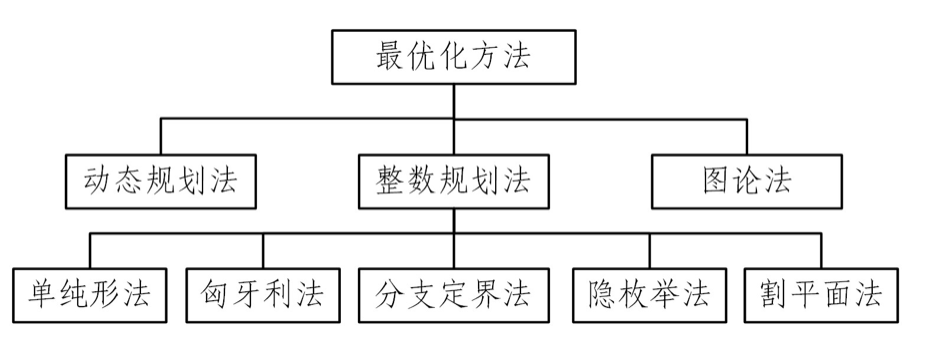
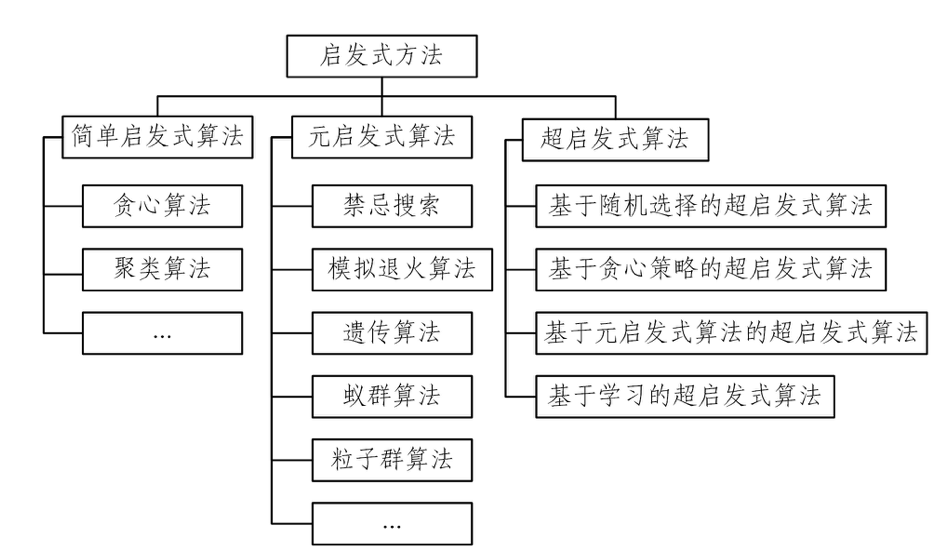
集中式任务分配算法包括最优化算法和启发式算法。
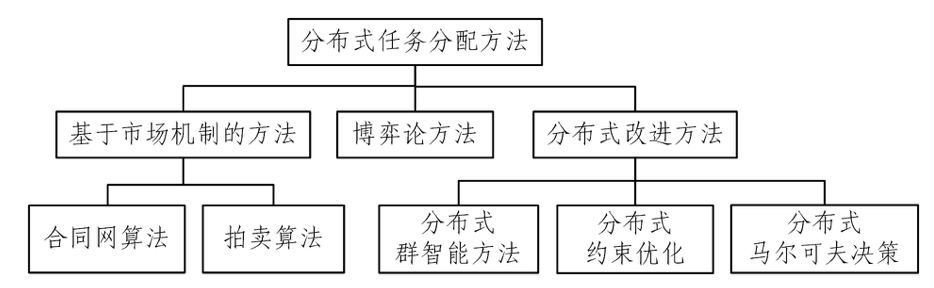
(2)分布式
二、集中式
提出基于离散粒子群算法的多UCAV协同目标分配方法。
目标分配问题描述为在尽量短的时间内将现有的目标分配给系统内的多架UCAV。
衡量分配方案优劣的重要性能指标:
- 损耗最小指标:设UCAV攻击目标i的生存概率为PSi,则HSi = 1 - PSi 为攻击目标i时的损耗。对UCAV进行任务分配,使得所有UCAV的损耗之和最小。
 (UCAV损耗最小指标通过最小化UCAV攻击目标的代价引导目标分配向着减小UCAV任务毁伤代价的方向进行。该指标使UCAV趋向于在安全航路飞行,使UCAV所受的威胁度最小。)
(UCAV损耗最小指标通过最小化UCAV攻击目标的代价引导目标分配向着减小UCAV任务毁伤代价的方向进行。该指标使UCAV趋向于在安全航路飞行,使UCAV所受的威胁度最小。) - 目标价值收益最大指标:目标的价值为Vt、杀伤概率PSi,则攻击目标i时,收益为Vi = Vt ·PSI,对UCAV进行任务分配,使得所有总收益最大。
 (目标价值收益最大指标通过对UCAV执行任务时所获取的目标价值的评估,来引导目标分配的优化和决策向着使作战效能最大化的方向进行。该指标使UCAV趋向于攻击高价值目标。)
(目标价值收益最大指标通过对UCAV执行任务时所获取的目标价值的评估,来引导目标分配的优化和决策向着使作战效能最大化的方向进行。该指标使UCAV趋向于攻击高价值目标。) - 飞行航程最短指标:设UCAV与目标i间的距离为Di,对UCAV进行任务分配,使得总航程最小。
 (飞行航程最短指标引导目标分配首先为各个UCAV分配近距离的任务目标)
(飞行航程最短指标引导目标分配首先为各个UCAV分配近距离的任务目标)
对粒子群算法的位置和速度更新公式进行重新定义。
Xi=(xi 1,xi 2,…,xi m)为粒子i在迭代中的位置;pi=(pi 1,pi 2,…,pi m)为粒子i的个体极值;pg=(pg 1,pg 2,…,pg m)为全局极值;ω为惯性权重;c1是认知系数,调节向pi的飞行步长;c2是社会系数,调节向pg的飞行步长。F1(Xi(t))是关于粒子Xi(t)的函数,其作用是考虑粒子本身速度对其位置变化的影响;F2(Xi(t),pi(t))为Xi(t)对pi(t)的学习操作;F3(Xi(t),pg(t))为Xi(t)对pg(t)的学习操作。

离散粒子群算法的流程如下图所示。

本文和上篇论文区别不是很大,主要是提出基于矩阵二进制粒子群优化。
三、分布式
采用分层递阶逐次求解的思路,从分布式的体系结构出发建立了层次化的协同任务控制模型,将问题分解为任务分配与任务协调两个相互衔接的关键问题,并将任务协调进一步分为计划协调和冲突消解两个层次。
采用任务效能来综合反映UCAV完成任务的质量、付出的代价和获得的收益。
UCAV执行任务T的效能U(T)为完成任务的收益Reward(T)减去相应付出的代价Cost(T),因为Reward(T)和Cost(T)具有不同的量纲,所以需要分别对其进行归一化处理,统一到相同的量纲后再进行相减:U(T) = Reward(T) - Cost(T)
Reward(T)由任务的价值以及UCAV执行该任务的能力决定。
- 任务的价值一般由指挥人员根据一定的战术原则预先设定,并在作战过程中根据战场态势的变化和作战意图的更改进行动态调整。
- 执行能力的能力由其本身性能及携带的武器或传感器共同决定,常常基于以往的数据统计通过相应的概率进行描述。
Cost(T)包括距离代价和风险代价。
- 距离代价是UCAV飞行到任务点的时间消耗和燃油消耗,一般以时间代价替代距离代价。
- 风险代价是任务点的飞行航路上被敌方威胁发现或攻击的风险。

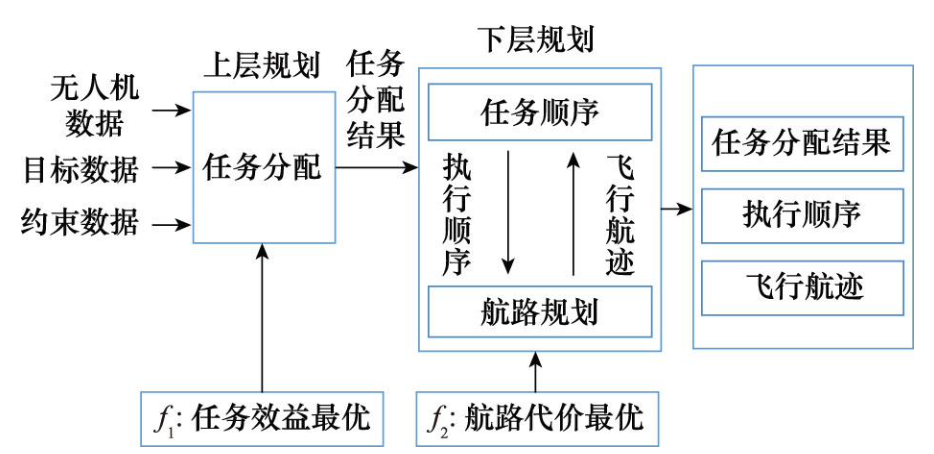
设计双层互耦的任务规划求解策略,将任务规划模型分为上层任务分配和下层任务序列优化,解决任务分配问题是基于模拟退火算法。
上层规划用于进行任务分配,确定哪些UCAV解决哪些任务主要满足优化指标f1;下层规划用于解决任务顺序和航路规划问题,即在已知UCAV需要打击的目标集合的前提下,优化出最优的任务序列和对应的飞行航路,主要关心优化指标f2。
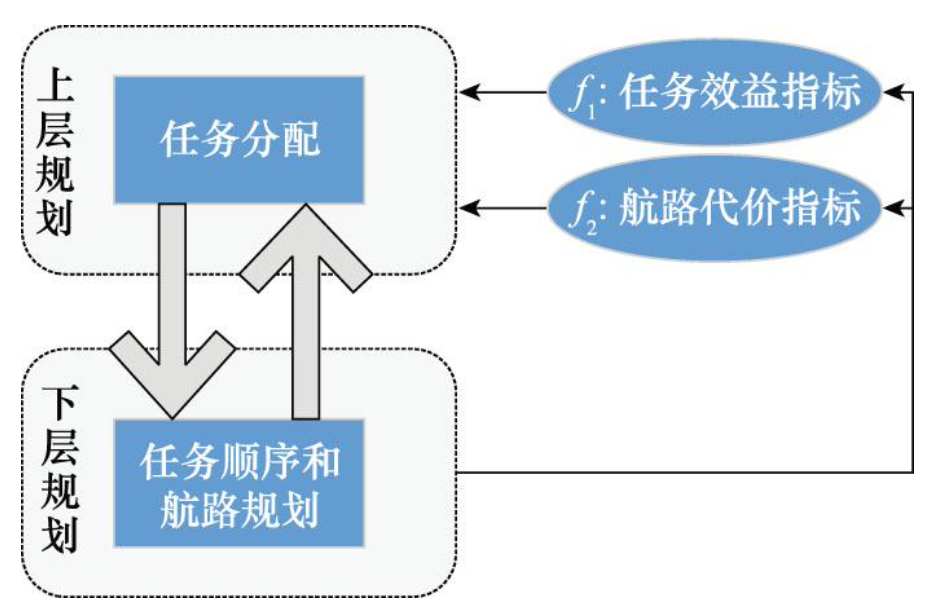
作者认为任务分配的效益指标比航路指标更加重要,为提高规划效率,对问题进行简化,即上层规划仅考虑效益指标,下层规划仅考虑航路指标。
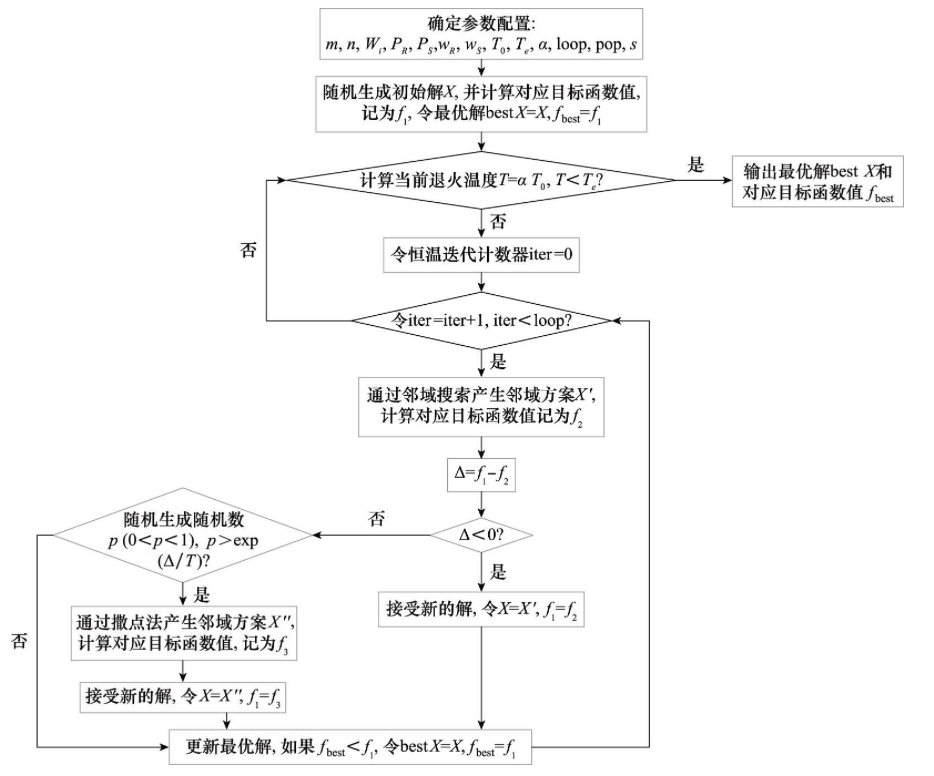
上层规划的算法流程,SAS算法的具体流程如下图所示。















 1036
1036

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









